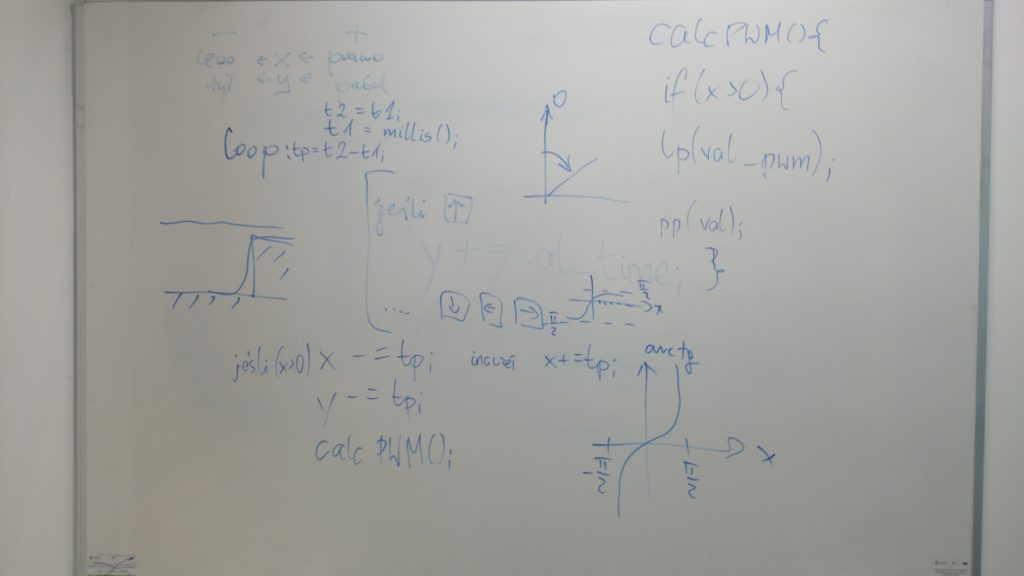
Kontynuujemy oprogramowywanie pojazdu – ciągle chodzi nam o jak najpłynniejszą jazdę. Pomysł Pana Mateusza:
Kolejne zajęcia po długim weekendziew dniu 9-maj o godz. 16:15. Zapraszam!
Kontynuujemy oprogramowywanie pojazdu – ciągle chodzi nam o jak najpłynniejszą jazdę. Pomysł Pana Mateusza:
Kolejne zajęcia po długim weekendziew dniu 9-maj o godz. 16:15. Zapraszam!

Kontynuujemy oprogramowywanie pojazdu – ciągle chodzi nam o jak najpłynniejszą jazdę.
Propozycje softu:
Kolejne zajęcia po Świętach – wtorek 25 kwietnia – sterujemy pilotem platformą – nie zapomnijcie przynieść ze sobą pilota na podczerwień. Zapraszam!
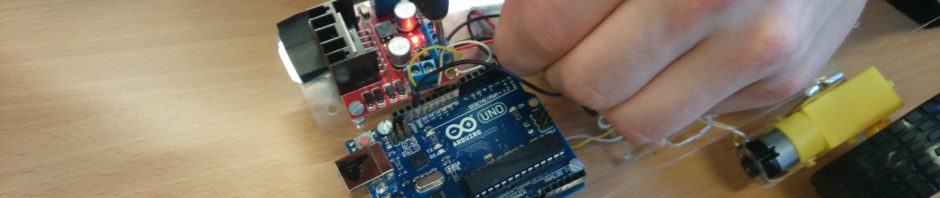
Rozpoczęliśmy od sprawdzenia, na ile czasu jazdy starczą nam zainstalowane akumulatorki. Pierwszy program był się bardzo prosty – cała naprzód (i mierzymy prąd).
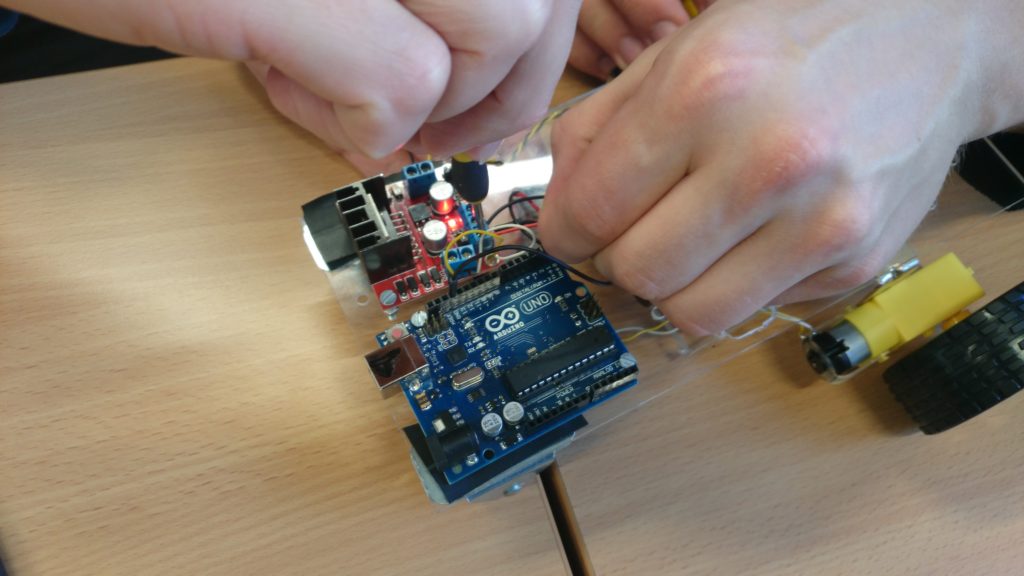
Potem zamonotowaliśmy czujkę TSOP 2236 i wpisaliśmy obsługę poleceń: jedź do przodu, tyłu, skręcaj (niektórzy nawet dwa rodziaje skrętów – ciasny, oraz szeroki).
Okazuje się, że pojazdy jeżdzą, ale trudno się nimi steruje – wykręcenie „ósemki” na przygotowanym torze nie jest wcale łatwe. Sprawa wymaga odpowiedniego oprogramowania rozkazów jazdy – na tym trzeba się skupić.
Kolejne zajęcia – także we wtorek 16:00 – sterujemy pilotem platformą – nie zapomnijcie przynieść ze sobą pilota od TV/radia/odkurzacza. Zapraszam!