Podstawy Arduino
Piny cyfrowe PWM z multimetrem i LED-em, a potem serwosilniczek (Serwo.h, silnik.attache(pin), silnik.write(stopnie).
Maskotka
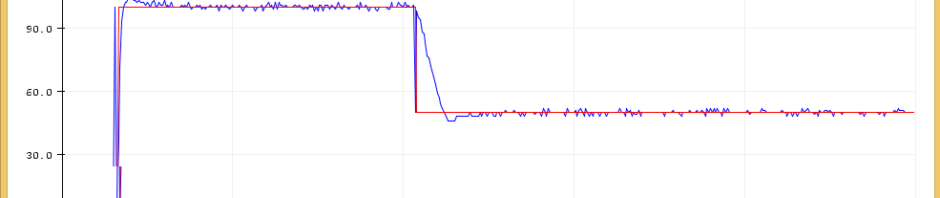
BB: regulator PID dla 1 koła: poniżej wynik działania algorytmu regulującego pracę silnika: kolor czerwony to krzywa pożądana (nastaw użytkownika, potencjometrem), kolor niebieski to aktualna praca koła. Oś Y na wykresie to RPS, czyli obroty na sekundę.
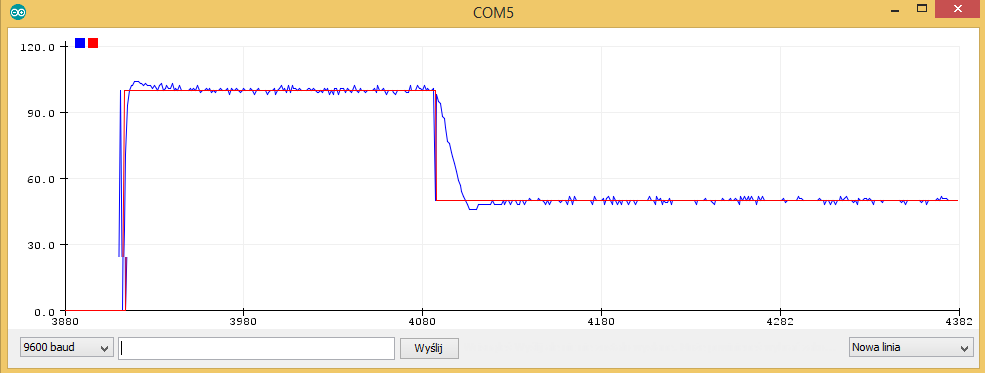
Praca regulatora PID ma polegać na tym, że RPS koła ma podążać za ustaloną wartością niezależnie od zewnętrznych czynników (np. koło na lodzie=kręci się praktycznie bez oporów, lub koło w błocie =ciężko mu wyjechać). Najważniejsze współczynniki regulatora PID Pab bartek dobrał metodą „prób i błędów” (plus własne, wcześniejsze doświadczenie) i są dobrane dla konkretnego silnika (dlatego ich tutaj nie podaję). Zauważ, jak szybko silnik dopasowuje się do pożądanej wartości). Przy okazji: wykres ze „starej” wersji algorytmu, na zajęciach Pan Bartek go udoskonalił i reakcja koła jest jeszcze szybsza!
