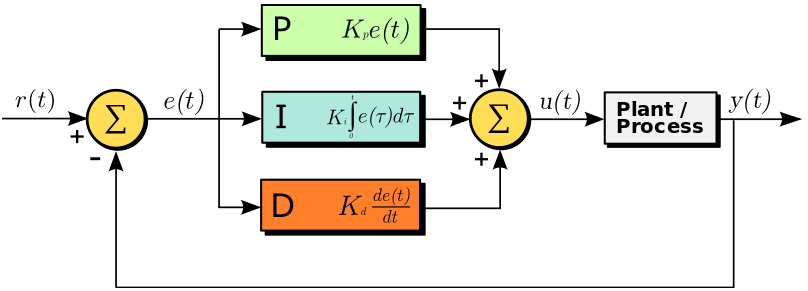
Wracamy do huśtawki z nowym podejściem – sterowaniem z wykorzystaniem PID-a. Niestety, konstrukcja mechaniczna uniemożliwiła poprawną pracę układu… trzeba ponownie popracować nad mocowaniem ramienia łączącego serwo z pierścieniem rury.
Warto przeczytać ten artykulik ze wprowadzeniem do PID-a:
Mamy Nowy Rok 2022 i pierwsze spotkanie Koła Fi-BOT. Fajnie, że studenci pracują pomimo przerwy świątecznej, bo wyniki są bardzo ciekawe!
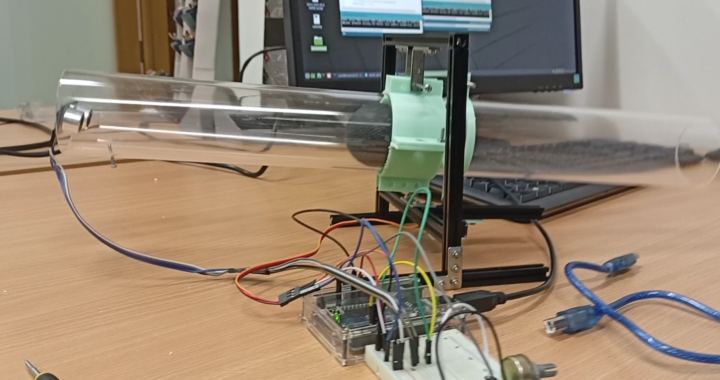
Huśtawka w działaniu.
Pan Stanisław uparł się na dopracowaniu konstrukcji mechanicznej oraz oprogramowania. Sam nie wiem, co było bardziej marudne… Przypomnę na czym polega zabawa w huśtawkę – należy tak sterować położeniem rury (góra/dół – tym zajmuje się serwosilniczek), aby kulka znajdująca się wewnątrz znalazła się w środku rury. To dość znane zagadnienie, ale Pan Stanisław podszedł do tego niestandardowo – zastosował wzorki z fizyki dla zsuwającej się kulki z równi pochyłej (z uwzględnieniem jej obrotów, czyli mechanik bryły sztywnej). Nie ma tu żadnego PID-a, tylko czystka fizyka! Czy to działa? Działa! o dziwo – jak dla mnie – bo myślałem, że taki sposób spowoduje ciągłe bujanie piłki w lewo i w prawo. A tu proszę! Gratulacje! Ze względu na zbliżającą się sesję egzaminacyjną opis rozwiązania zostanie dodany gdzieś w miesiącu luty (po sesji).
W międzyczasie Pan Bartek kombinuje z produkcją płytek PCB na hobbystycznej frezarce CNC, a Pan Dominik wymyślił bardzo nieszablonowy sposób poruszania huśtawką (warto go zrealizować! choć będzie trzeba popracować mechanicznie).
Fajnie, że właśnie tak rozpoczął się Nowy Rok na Fi-BOTcie!