Budujemy drugie podwozie (ciągle w wersji v0.1) – chodzi o to, aby na Święta mieć dwa, a może nawet trzy egzemplarze pojazdów rozdysponowane po zainteresowanych Studentach. To powinno przyspieszyć pracę nad projektem 😉
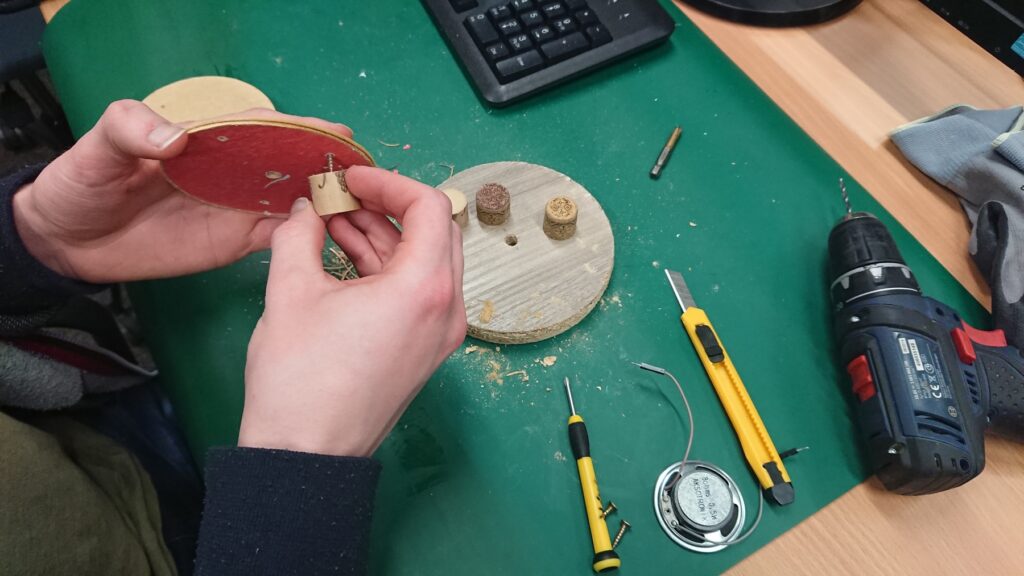
W pracach nad drugą konstrukcją wykorzystaliśmy korek od wina – jest wytrzymały, świetnie się modeluje (przycina, docina) a także łączy i dzieli! Brawo Pan RŁ!
Drugie podwozie i niezastąpiony materiał „konstruktora amatora” – korek od wina 😉
Pan Tomasz w międzyczasie przypomniał sobie komunikację Bluetooth i wykorzystał nową apkę ze sklepu Androida – Arduino RC. Zaletą jest prostota i wystarczająca funkcjonalność!
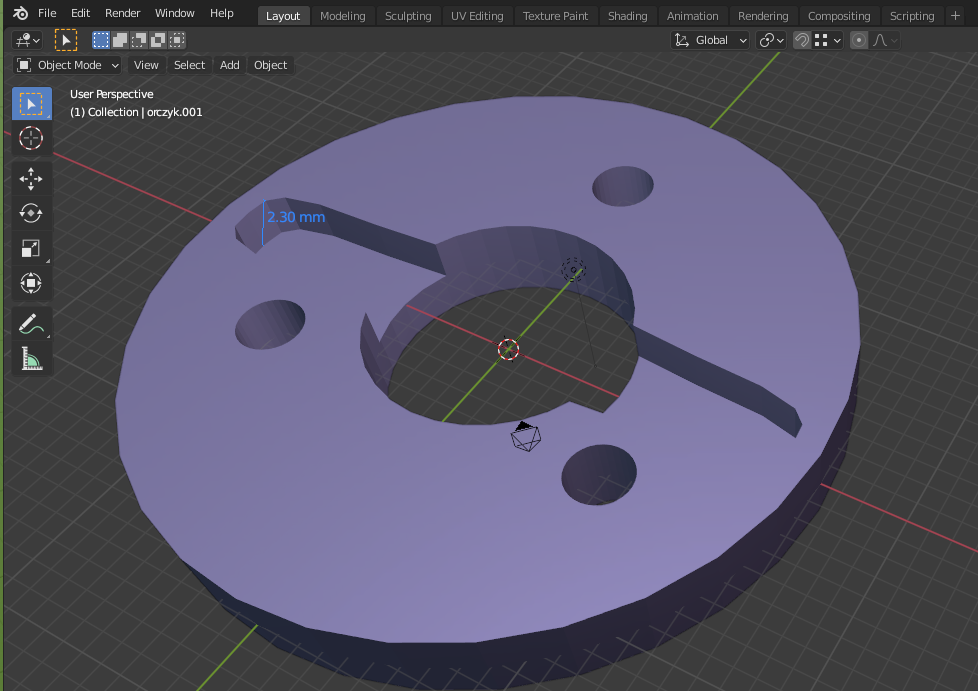
Mieliśmy robić coś prowizorycznego, jednak do montażu kół wykorzystaliśmy przygotowane mocowanie – zaprojektowane i wydrukowane na Wydziałowej drukarce 3D Zoltrax M200. Prosty projekt w Blenderze:
Projekt „trzymaka” koła i silniczka: wykorzystujemy oryginalny orczyk z silniczka, który wtapia się w konstrukcję trzymaka. Trzy otwory 3mm, oddalone od środka o 10mm – pełna profeska 😉
Wydruk 2 sztuk to ~30min pracy drukarki. Efekt poniżej.
Koło Tamiya 70111 z „trzymakiem” – po co 3 śrubki, skoro i na 2 się trzyma? 😉
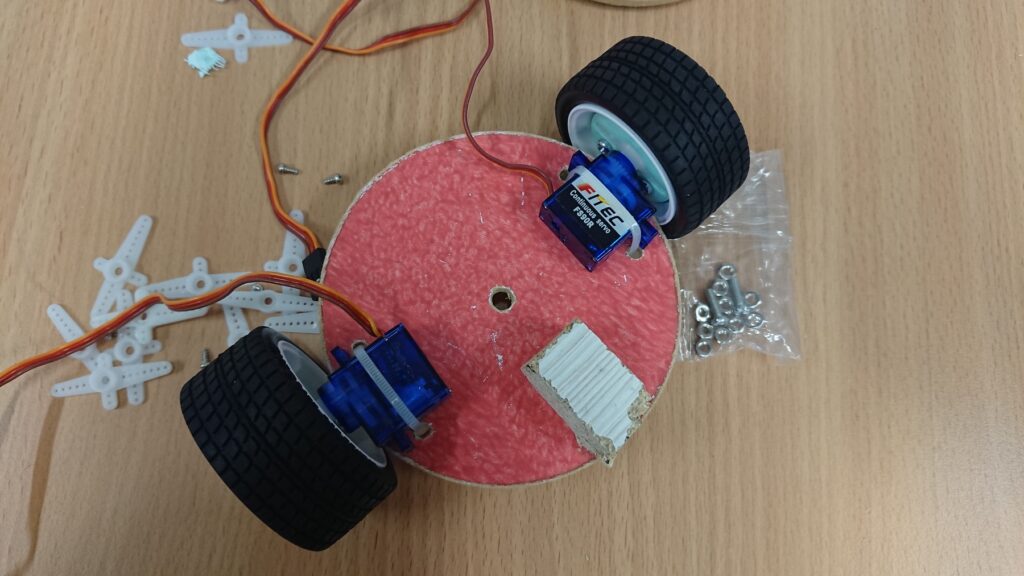
Napęd to dwa serwa pracy ciągłej – Feetech FT90R.
Serwo pracy ciągłej z zamocowanymi kołami.
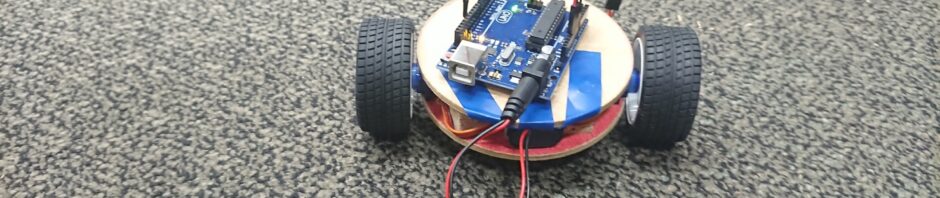
Finalnie wszystko wygląda tak:
Kanapka v0.1: czyli pojazd w pełnej krasie 😉 Zasilanie (aku 9V) na polnym pokładzie. W planach kolejny pokład z programowalnymi LED-ami RGB.
Mocowanie silników do podwozia – chwilowotrtytkami. Jednak jest to NAJSŁABSZY element tej konstrukcji. Ale wydawał się wystarczający do sprawdzenia, jak działa.
Pierwsze próby autonomicznej jazdy!
Miało być szybko i minimalistycznie, jednak trzeba wrócić do mocowania silniczków – trytytki należy zmienić na „dedykowane” trzymaki do serw (ponownie projekt 3D i druk na Zoltraxie M200). Liczymy, że dzięki temu pojazd będzie jeździć prosto!
Maskotka
Pan Bartek wraca do projektu Maskotki i zamierza tam wgrać PID-a do lepszego sterowania kołami. Na razie odgrzebał projekt, połączył przewody (sfajczył jedno Arduino UNO – ale jak, tego nikt nie wie) no i projekt jeździ! Z braku swojego kontrolera wykombinował takie oto zabawnie wyglądające cudo 😉
Do sterowania podwoziem Maskotki wykorzystujemy… cztero-kołowy pojazd z JOY shieldem! Po prostu nie chciało się rozbierać/rozkręcać gotowej już konstrukcji…
Słychać ten „piękny” pisk podczas zakrętów? Oj słychać… ale jego źródło zostało już zlokalizowane! To nie silniki (jak nam się pierwotnie wydawało), a… trzecie koło! Będzie trzeba coś z tym zrobić.
Poprzedni semetr zakończyliśmy poznaniem niezbędnych elementów, jakie zamierzamy wykorzystać nad naszym projektem. Teraz przyszedł czas na zebranie tego w całość. Powstał taki oto plan:
Konstrukcja mechaniczna.
Programowanie:
sterowanie pojazdem z „kabla”
sterowanie bezprzewodowe (bluetooth)
czujka pola magnetycznego
kolorowe LEDy – sygnalizacja energii, paliwa…
Różne scenariusze zabawy:
„bij zabij” – każdy na każdego
„zając” – jeden ucieka, inni go gonią
…zobaczymy
Finalizacja projektu, część i chwała, nagrody prezydenta RP i sukces finansowy 😉
Punkt pierwszy jest kluczowy i zarazem problematyczny – zamierzamy zrobić coś prowizorycznego, ze sklejki, gumki recepturki i papieru toaletowego (oraz inne rzeczy „spod ręki” – liczy się kreatywność, i na tym polega problematyczność). Przyświecać nam będzie główny cel – podwozie ma być (w miarę) stabilne i gotowe do realizacji kolejnych punktów. W przyszłości (za semestr?) studenci poznają tajniki druku 3D i stworzą piękne pojazdy, na razie będzie prowizorka.
Rzeczy „spod ręki” nie są takie ubogie – w szafie pracowni znalazł się zestaw kół sportowych o średnicy 56 mm i szerokości 25 mm.
koła Tamiya 70111
Napęd bazować będzie na dwóch serwach pracy ciągłej – Feetech FT90R. Wybór podyktowany był tym, że nie musimy montować sterownika do silników DC (mostek H) gdyż te mikro-serwa mają sterowanie wbudowane w sobie.
Serwo pracy ciągłej – podstawa napędu.
Trzeba „tylko” wykombinować połączenie silniczka z tymi kołami… Tym zajmiemy się za tydzień.