
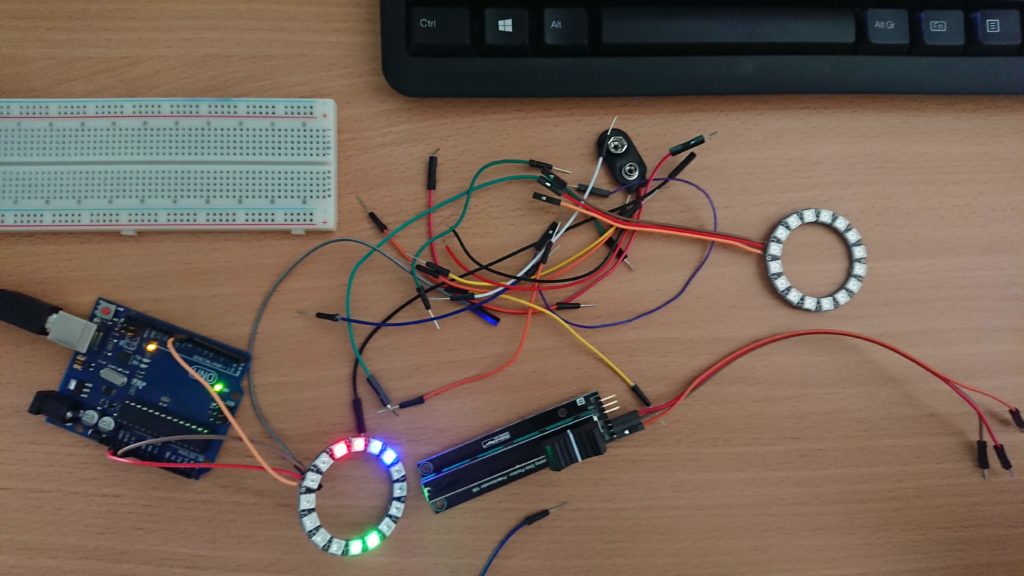
Kolejne spotkanie z kolorowymi paskami LEDów WS2812B – tym razem zapętlone w koło, więc efekt fajny!
Efekty mogą być fajne, ale… programując tylko takie „kółeczka” nie martwimy się używaniem funkcji delay(). To dobrze w tym prostym przypadku. Ale czy zawsze tak można?
Zadanie do wykonania
migać pierwszym LEDem co 1 sek (włączać na 1 sek, wyłączać na 1 sek), migać drugim LEDem co 30 sek — wszystko bez użycia funkcji delay() ! Po co to nam? A chodzi o to, że efekty świetlne mają pojawiać się niezależnie od innych rzeczy dziejących się w „międzyczasie”, nie chcemy ich stopować delay()em. W naszym przypadku zamierzamy jeździć pojazdami, które sterowane będą bezprzewodowo przez moduły radiowe nRF24L więc nie chcemy zatrzymywać odbioru sterowania wyświetlając efekty na kolorowych kółkach. Jak to zrobić?
Liczniki czasu – funkcja millis()
Powiedzmy, że chcemy wykonać pewne instrukcje co interwał czasu (może być 150 ms, może być 3777 ms albo dowolnie).
unsigned long int interwal = 3777;
unsigned long int t1,t2;
unsigned long int licznik = 0;
void loop(){
t1 = millis();
//
//rozne operacje, ktorych nie chcemy zatrzymywac
//
t2 = millis();
licznik += (t2 - t1);
if (licznik >= interwal){
//wykonaj zadania co dany interwal
licznik = 0;
}
}//loopPowyższy kod to szkic postępowania w celu uzyskania „wielozadaniowości” na platformie Arduino 😉 Na początku pętli loop() zapisujemy aktualny czasu do zmiennej t1, wykonujemy wszystkie potrzebne instrukcje, których nie chcemy przerywać, na koniec ponownie zapisujemy czas do zmiennej t2. Zwiększamy licznik czasu (zmienna licznik) właśnie o czas wykonania pętli loop(), czyli różnicę t2-t1. Następnie sprawdzamy czy licznik „napełnił się” do zadanego interwału – jeśli tak, wykonujemy zadania i zerujemy licznik. Oczywiście możemy mieć wiele liczników, jak też i różne interwały…
(c) K.G. 2019

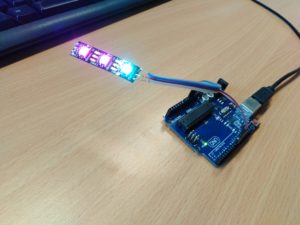


 Jak zawsze coś się musiało rozlutować…
Jak zawsze coś się musiało rozlutować…