W dniu 21.05.2025 r. braliśmy udział w comiesięcznym spotkaniu miłośników programowania w języku python. Co mamy wspólnego z pythonem? Niewiele 😉 Ale tematyką główną było programowanie elektroniki – hobbystyczne roboty i drony. Skorzystaliśmy z zaproszenia i było super! Plan 73 edycji PyStoka był następującY:
Roboty Sztucznie Inteligentne – Nikodem Bartnik
Drony, Python vs Podstawa programowa – Adam Jurkiewicz;
Zgarnij książki, licencje Jetbrains oraz Rpi Pico 2 W;
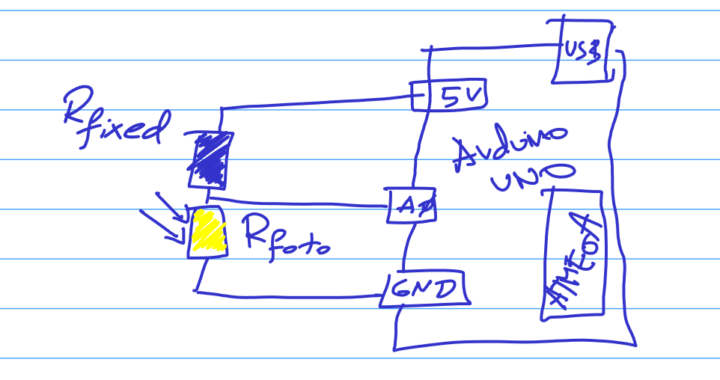
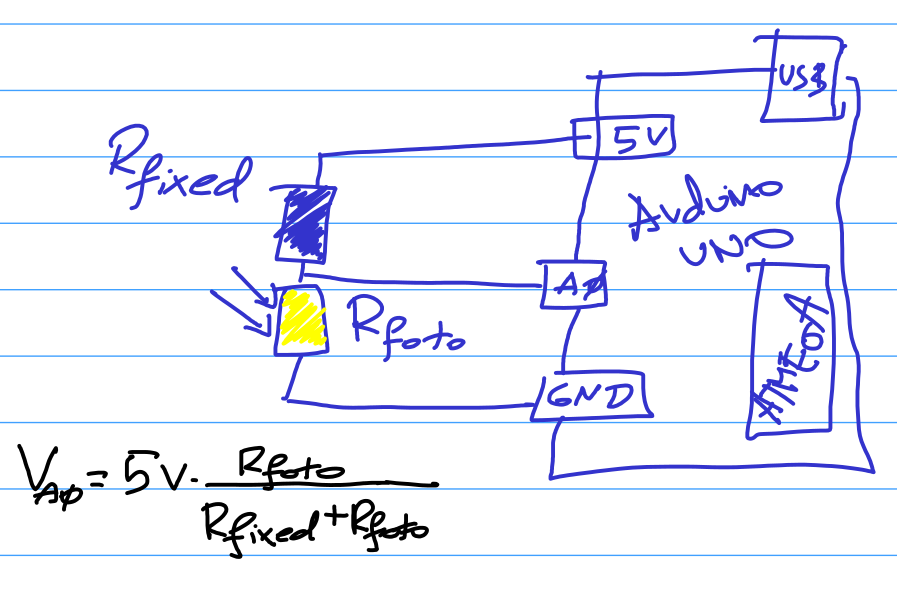
Światłolub ma oczy… fotorezystory! Ale Arduino nie odczytuje rezystancji, tylko napięcia. Dlatego wykorzystujemy dzielnik napięcia według schematu:
Analizujemy prosty dzielnik napięcia, wykorzystywany do odczytu wartości z czujnika za pomocą Arduino. Napięcie odczytywane na pinie A0 będzie dane wzorkiem V_A0 (kolor czarny na obrazku powyżej). Celem jest znalezienie takiej wartości rezystora stałego (R_fixed), która zapewni najlepsze rozróżnienie między warunkami jasnymi a ciemnymi, tak aby Arduino mogło najlepiej wykrywać różnicę. Chcemy:
Zmierzyć opory R_foto w warunkach jasnych i ciemnych – miernik (multimetr)
Obliczyć V_A0 dla różnych wartości R_fixed w dwóch przypadkach: jasno i ciemno
Określić różnicę napięć (ΔV)
Przeskalować tę różnicę do zakresu analogRead() Arduino (0–1023)
Narysować odpowiednie wykresy, aby określić, która wartość rezystora działa najlepiej
Mierzymy opór czujnika w warunkach jasnych i ciemnych – następnie definiujemy stałe: napięcie wejściowe (5V) oraz opór czujnika w warunkach jasnych i ciemnych warunkach.
import matplotlib.pyplot as plt # Stałe V_in = 5 # Napięcie wejściowe w woltach R_sensor_light = 60 # Opór czujnika w jasności (kiloomy) R_sensor_dark = 180 # Opór czujnika w ciemności (kiloomy)
Przygotowujemy tablice (czyli listy w języku Python) do przechowywania wyników dla każdej testowanej wartości rezystora.
# Listy do przechowywania wyników R_fixed_values = list(range(1, 1000)) V_out_light_values = [] V_out_dark_values = [] delta_V_values = []
Przechodzimy pętlą przez wartości R_fixed (od 1 do 999 kiloomy) i obliczamy:
Napięcie wyjściowe, gdy czujnik jest w jasności (V_out_light)
Napięcie wyjściowe, gdy czujnik jest w ciemności (V_out_dark)
Różnicę napięć między tymi dwoma wartościami (delta_V)
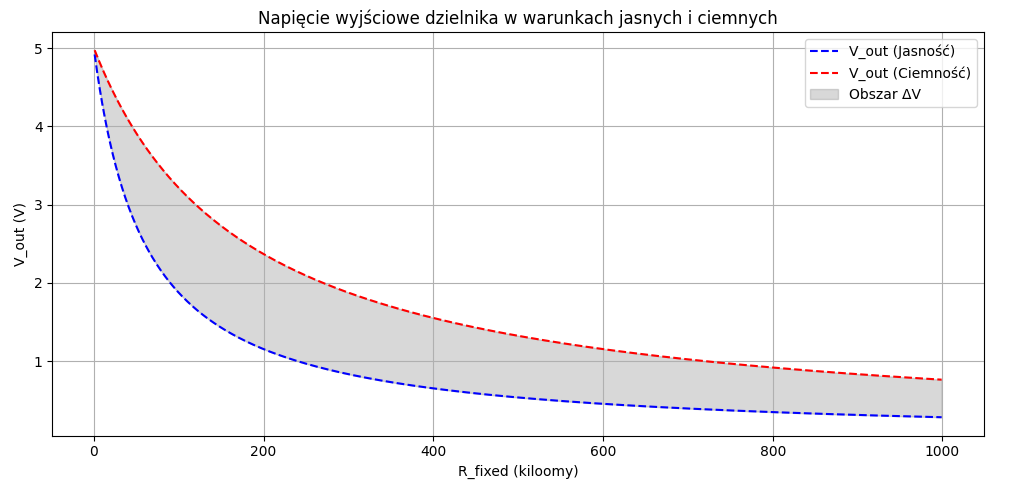
Rysujemy napięcie wyjściowe dla warunków jasnych i ciemnych oraz „cieniujemy” obszar między dwiema funkcjami napięcia. To pokazuje w którym miejscu i jak bardzo zmienia się sygnał z czujnika.
# Wykres 1: V_out dla jasności i ciemności plt.figure(figsize=(10, 5)) plt.plot(R_fixed_values, V_out_light_values, '--b', label='V_out (Jasność)') plt.plot(R_fixed_values, V_out_dark_values, '--r', label='V_out (Ciemność)')
# Wypełnienie obszaru między dwiema krzywymi where_condition = [dark > light for dark, light in zip(V_out_dark_values, _out_light_values)] plt.fill_between(R_fixed_values, V_out_light_values, V_out_dark_values,where=where_condition,color='gray', alpha=0.3, label='Obszar ΔV') plt.title('Napięcie wyjściowe dzielnika w warunkach jasnych i ciemnych') plt.xlabel('R_fixed (kiloomy)') plt.ylabel('V_out (V)') plt.legend() plt.grid(True) plt.tight_layout() plt.show()
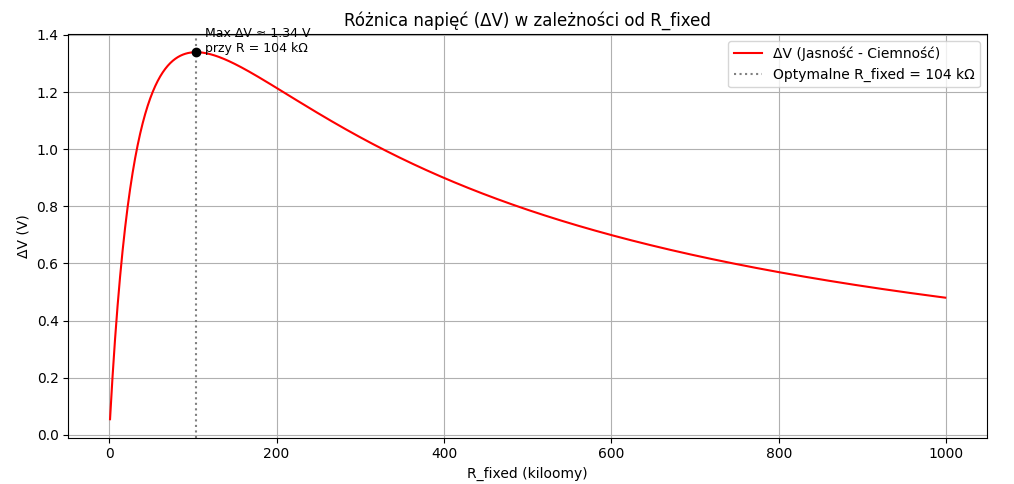
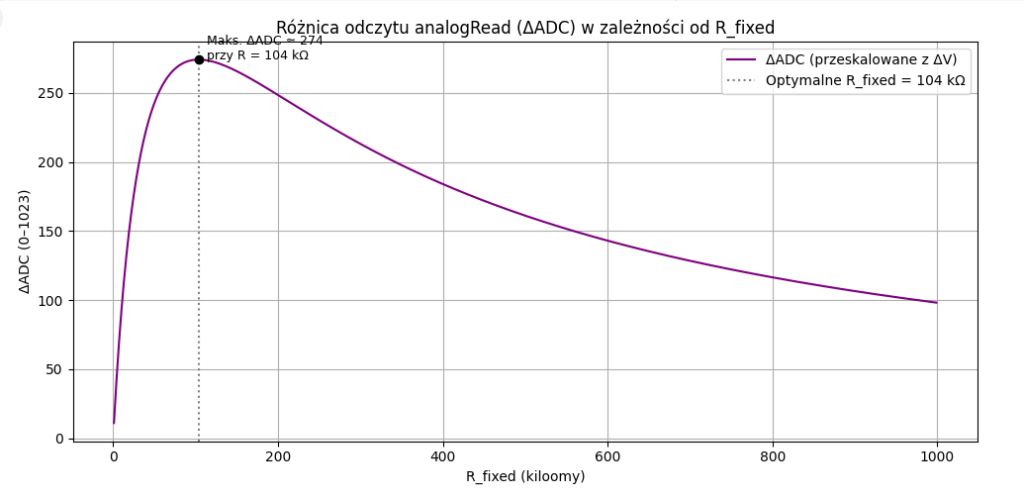
Rysujemy różnicę napięć (ΔV) i zaznaczamy rezystor, który daje największe rozdzielenie sygnału
Mapujemy różnicę napięć ΔV do skali analogRead() Arduino (0–1023)
# Szukanie najlepszej wartości R_fixed pod względem różnicy odczytu ADC delta_ADC_values = [(v / V_in) * 1023 for v in delta_V_values] max_delta_ADC = max(delta_ADC_values) max_adc_index = delta_ADC_values.index(max_delta_ADC) optimal_R_adc = R_fixed_values[max_adc_index]
Rysujemy ΔV przeskalowaną do zakresu analogRead oraz zaznaczamy rezystor dający największą różnicę odczytu cyfrowego
Trwa szlifowanie kodu… a raczej tworzenie go tak, by działał poprawnie 😉 Okazuje się bowiem, że w różnych miejscach testowanej podłogi jest różne oświetlenie (zastane) – o dziwo! 😀 Wbite na sztywno wartości odczytane z czujników nie pracują 😉 Na tym właśnie polega ta zabawa! Rozwiązanie? aktualizować światło zastane co 1s? Tak działa jeden zespół. Drugi kombinuje z hardware – wprowadza jakąś przeszkodę blokującą światło zastane – ciekawe, co z tego wyjdzie.
Zawody
Jeśli sterowanie będzie działać, to sprawdzimy to w ekstremalnej sytuacji- postawimy dwie przeszkody, będzie trzeba je objeżdźać – kręcąc tzw. ósemki. Zmierzymy czas trzech okążeń i się okaże, który zespół jest lepszy 😉
Przedłużone zostały zapisy do wydarzenia-konkursu „pre-KRON 2025”, które odbędzie się 29 kwietnia 2025 roku, o godzinie 17:00, w sali C02 Wydziału Nauk o Edukacji UwB.
Pre-KRON 2025 to konkurs, w którym zmierzyć się mogą koła naukowe, działające na Uniwersytecie w Białymstoku. Formuła jest prosta – każde koło ma do dyspozycji 10 minut. W ich trakcie ma za zadanie przedstawienie jakiejś naukowej treści w przystępnej, kreatywnej i innowacyjnej formie.
Śmieszna prezentacja z kotami? Tak! Skecz? Może być. Krótkie przedstawienie? Czemu nie! Koła ograniczone są wyłącznie przez własną wyobraźnię. A, no i oczywiście przez czas!
Tematem tegorocznego KRONu jest: „pochodzenie – wstyd czy mit?”. I to właśnie do tego hasła powinny w luźny sposób nawiązywać prezentacje.
Trzy najlepsze prezentacje – wyboru dokona jury wraz z publicznością – zostaną nagrodzone dotacjami ze środków Parlamentu Studenckiego (za I miejsce – aż 1200 złotych!). Wystąpią także na tegorocznym KRONie.
Odbyły się Dni Otwarte UwB – członkowie koła Fi-BOT dzielnie uczestniczyli w wydarzeniu. Prezentowali grę REFLEX (Arduino) oraz silniki DC (mostek H, układ L298N).
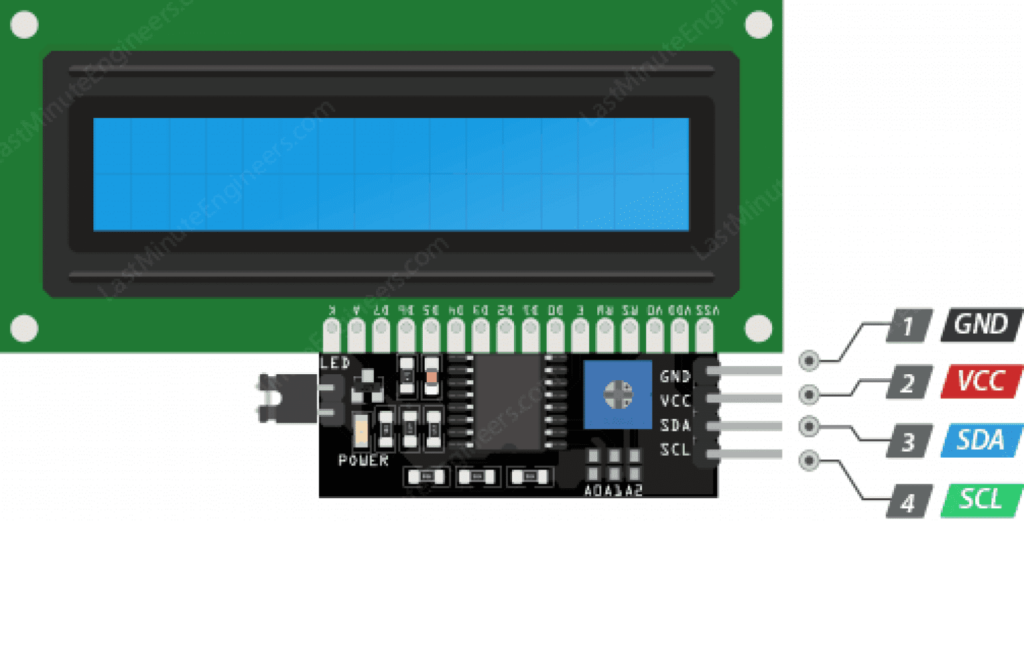
Aby widzieć odczyty z fotorezystorów wykorzystujemy ekran LCD16x2 — nie chcemy jednak tracić cennych portów cyfrowych (chyba trzeba użyć 7-miu do obsługi), więc stosujemy moduł I2C hd44780.
testy, testy, testy…
Czyli najprzyjemniejsza część zabawy – prototyp już mamy, teraz trzeba go mądrze oprogramować. Zaczynamy!
Trzeba odczytać wskazania obu fotorezystorów gdy światło jest przed pojazdem, z jednego boku, z drugiego… Zapisać do notepada.exe by następnie wpisać w ino 🙂
Kiszka. Stoi. Albo kręci się nie w tą stronę, co trzeba. A niby miało działać 😛 więc znowu do kompa i wprowadzamy zmiany w kodzie /w parametrach.
Nawet kłótni nie było 🙂 nikt nie zrzucał winy na drugiego – nie działa dobrze, więc trzeba poprawić! Świetny team-work !
Zawody
Za tydzień kody będą już dopieszczone, więc będzie można przystąpić do sprawdzenia algorytmów w akcji – postawimy dwie przeszkody, będzie trzeba je objeżdźać – kręcąc tzw. ósemki. Zmierzymy czas trzech okążeń i się okaże, który zespół jest lepszy 😉
Wystartował projekt konkursowy Młodzieżowe Podlaskie Lokalne – jest możliwość uzyskania dofinansowania w kwocie 2000 – 6000 zł na projekt samorządów studenckich i doktoranckich, uczelnianych organizacji studenckich i doktoranckich (np. kół naukowych, chóru itp.).
Próbujemy! The Mecanum Mavericks
Ostatnio budujemy pojazdy sterowane latarką… ale czemu nie spróbować czegoś bardziej atrakcyjnego? Niech to dalej będzie „światłolub” ale z ciekawszą mechaniką ruchu? Chcemy kupić koła mecanum, dzięki czemu pojazdy będą poruszać się dość nietypowo 😉
Taki projekt można świetnie rozbudowywać – dodawać inny rodzaj sterowania (radiowe!), a także zrobić z tego zabawę „w berka” – o ile posiadamy dwa takie pojazdy. My wnioskujemy o 5 zestawów i planujemy… sza, cicho-sza 😉 Zobaczymy 😉
Aktualizacja – wyniki konkursu
YYYY, nie udało się. Nasz projekt znalazł się blisko finałowej grupy, nawet został wpisany na listę rezerwowych ale… nie udało się. Cóż – będziemy próbować za rok!
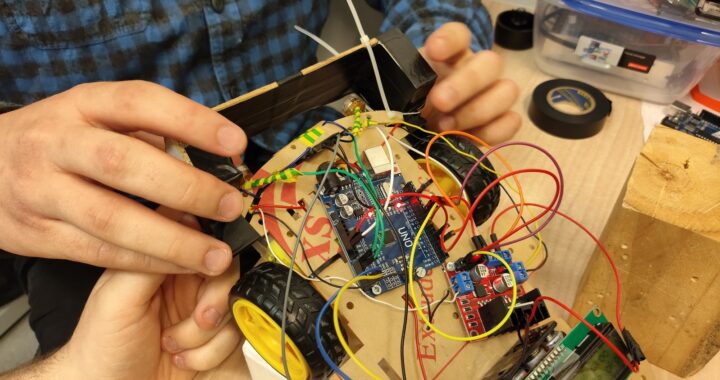
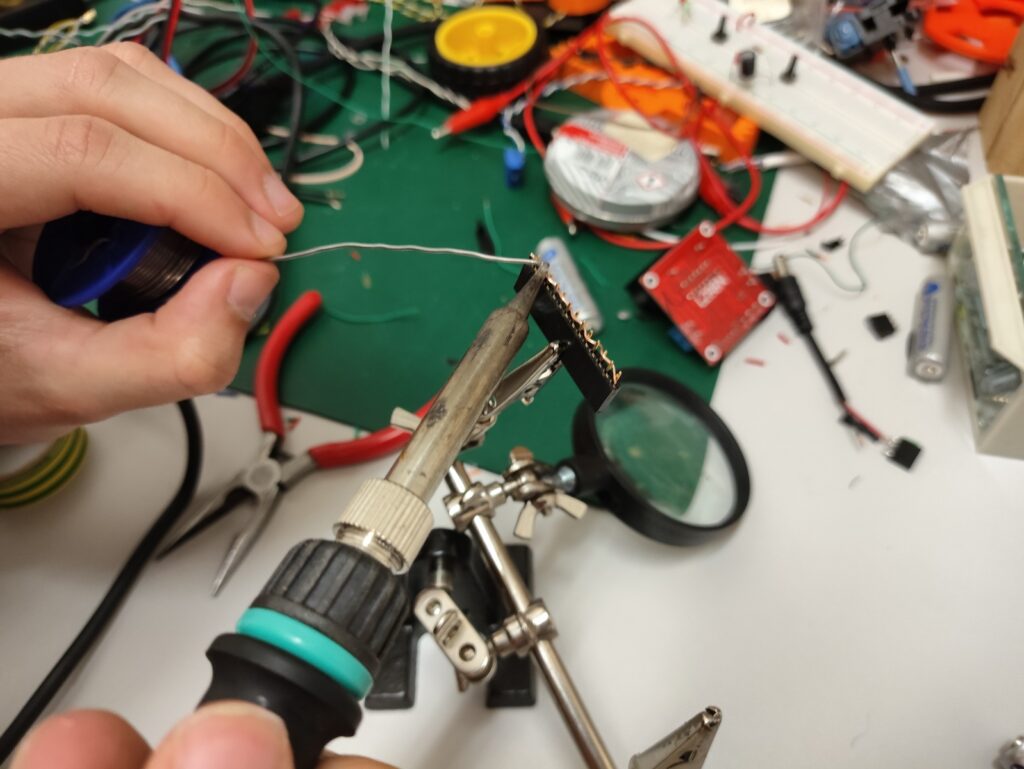
Ciągle budujemy pojazd sterowany latarką – wykorzystamy fotorezystory jako „oczy”. Dziś wracamy do konstrukcji pojazdu i będą pierwsze próby. Ale nie chcemy mieć płytki prototypowej na pokładzie więc… poznajemy lutownicę 😉
Przygotowujemy sobie wielokrotne wyjścia GND i 5V, a także lutujemy rezystor z fotorezystorem w szereg – z dodatkowym przewodem do pinu analogowego Arduino UNO. Wszystko proste, tylko trzeba trochę się pobawić… na tym to chyba polega, prawda? 😉
No i dobrze, że się ucząc się także się bawimy!
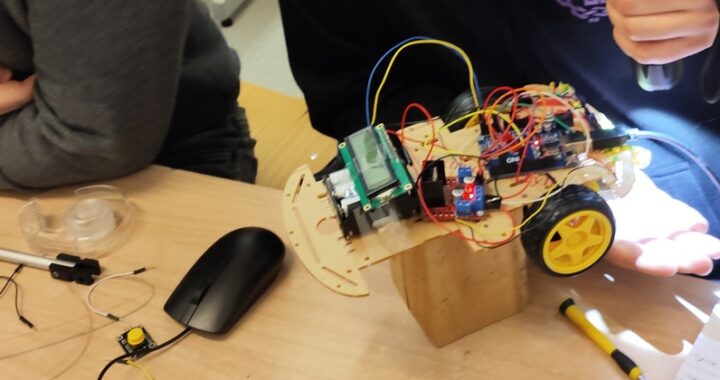
Udało się! Oczy skierowane są na podłogę (trochę za bardzo) więc rozpoczyna się faza testowa oprogramowania – część „hardwareowa” chwilowo zakończona.
Czyli budujemy pojazd sterowany latarką – wykorzystamy fotorezystor jako „oczy”. Czyli muszą być dwa, aby porównywać ilość światła z jednego czujnika i drugiego i na tej podstawie jechać do przodu, zatrzymywać się czy skręcać. Niby proste – choć cała magia tkwi w odpowiednim doborze parametrów decyzyjnych.
analogRead()
Studenci jeszcze nie mieli omawianej tej funkcji na zajęciach z Arduino – więc zaczynamy od podstaw. Uczymy się więc co mierzymy, jakie są ograniczenia Arduino UNO, sprawdzamy odczyty napięcia 3.3V oraz 5V z płytki Arduino, a także baterie AAA.
Przechodzimy dalej do fotorezytora i uczymy się go najlepiej wykorzystać. Skoro Aruino idczytuje napięcie a nie opór – to wykorzystujemy dzielnik napięcia i odczytujemy napięcie. Ale jaka wartość stałego rezystora w dzielniku dla naszego fotorezystora? Testujemy z wykorzystaniem thinkercada!
Dziś bez podłączenia jeżdzącej platformy – to będzie za tydzień!
Kontynuujemy przygodę z L298N – tym razem podłączamy dwa kółka do tymczasowej platformy (udającej podwozie pojazdu). Trzeba się „namęczyć” tworząc konstrukcje prototypową, być kreatywnym i wykorzystywać to, co się ma w zasięgu ręki 😉
Konstrukcje gotowe więc programujemy – zaczynamy od Arduino UNO. Bardzo prymitywny kod sterujący kołami: 1 sek jazdy do przodu, skręcanie 1 sek i tak powtarzane w kółko.
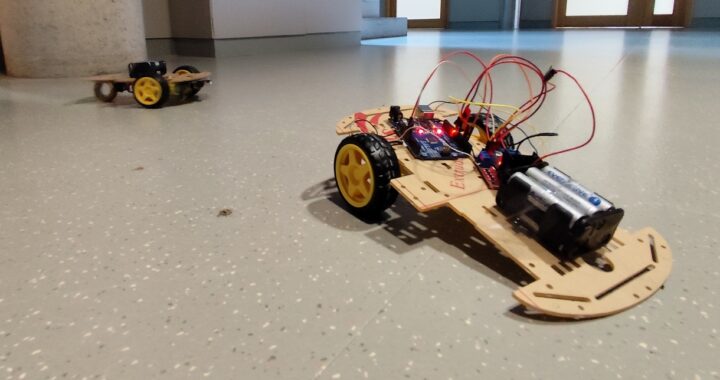
Skoro działa na biurku to… jak działa „w realu”?
Zadowoloenie jest 😉 ale i smuteczek, że pojazdy nie są sterowane… wykonują najprostrze czynności, wcześniej zaplanowane. Dlatego podjeliśmy decyzję, że będziemy sterować latarką – czyli budujemy światłoluba 😉 Zamierzamy prowadzić światło latarki przed pojazdem, a pojazd ma podążać za nim. Do dzieła!