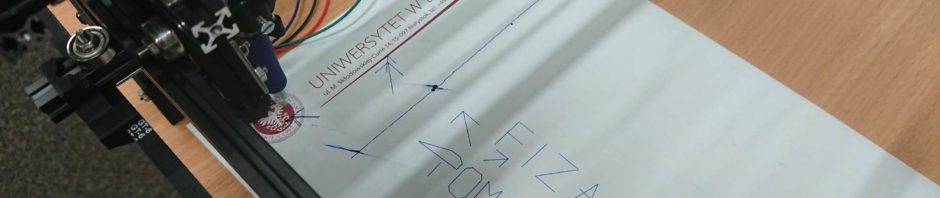
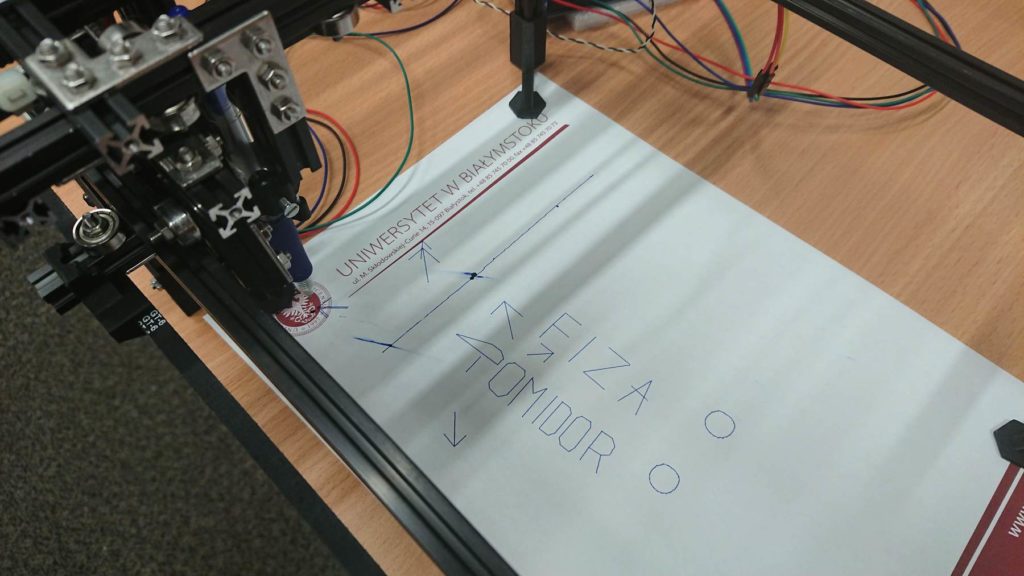
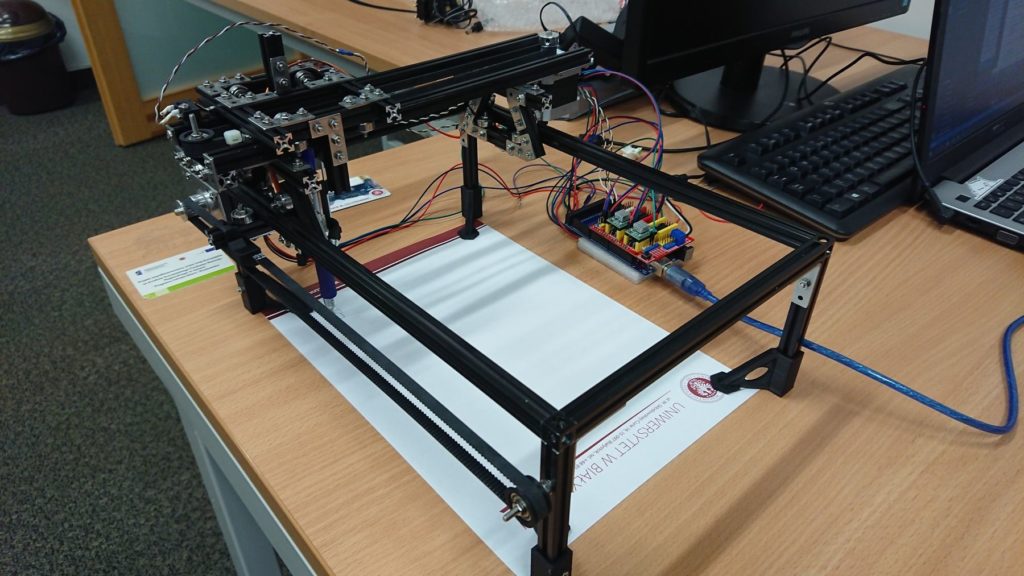
Niby prosta sprawa – okienko „zapisz rysunek” przy wychodzeniu z programu processinga. Nie chcemy utracić tworzonej grafiki (problem powstał podczas tworzenia obrazów w GRAPH CREATORZE – softwarze do obsługi
Wielozadaniowej maszyny 2D/3D do zadań precyzyjnych), więc musi sie pojawić dialog o zapisie/odrzeceniu tworzonej pracy. Nie wystarczyło nadpisać funkcji exit() w processingu…
Okienka w Processingu oparte są (chyba) na tzw. JFrame’ach. Aby nimi sterować musimy się dostać do obiektu odpowiedzialnego za konkretne okno w aplikacji. Na początku trzeba utworzyć
uchwyt do JFrame’a:
import javax.swing.JFrame;
import processing.awt.PSurfaceAWT;
...
PSurfaceAWT surf = (PSurfaceAWT) getSurface();
PSurfaceAWT.SmoothCanvas canvas = (PSurfaceAWT.SmoothCanvas) surf.getNative();
JFrame jframe = (JFrame) canvas.getFrame(); //uchwyt
...
Otrzymany w ten sposób uchwyt można wykorzystać do modyfikacji działania okienka, np. ustawienie czynności przy zamykaniu okna:
jframe.setDefaultCloseOperation(JFrame.DO_NOTHING_ON_CLOSE);
Po dodaniu tych linijek kodu można zauważyć, że nic się nie zmieniło. Processing również rejestruje czy użytkownik próbuje zamknąć okno i wywołuje specjalną metodę to zamykania programu: exit().
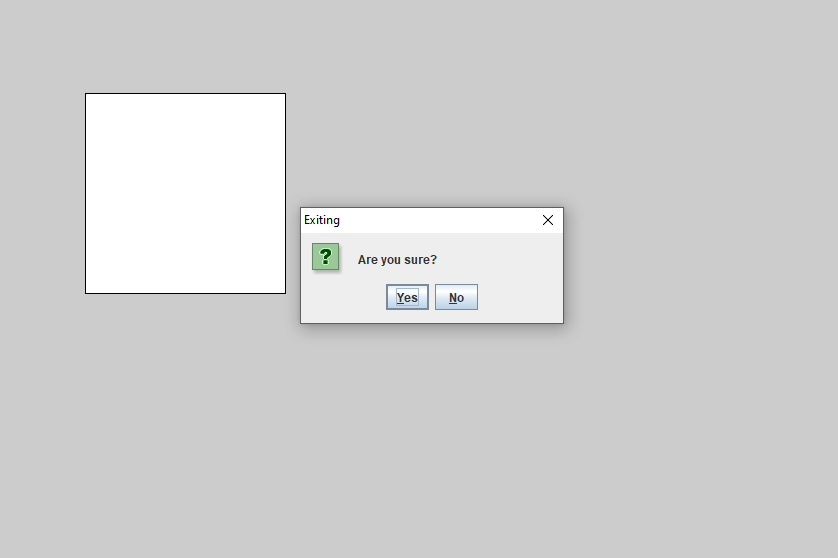
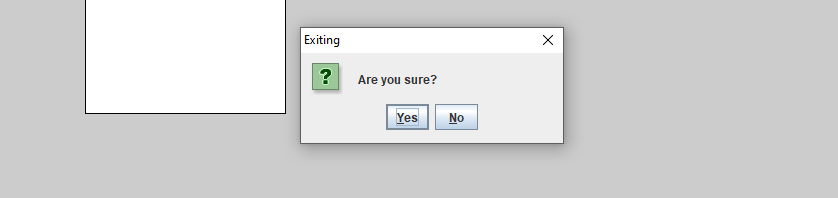
Teraz wystarczy tą metodę nadpisać własnym kodem aby otrzymać dialog z potwierdzeniem wyłączenia programu:
void exit(){ // nadpisanie metody exit()
int id = showConfirmDialog(
frame,
"Are you sure?", // tekst okienka
"Exiting", // tytuł okna
YES_NO_OPTION); // opcja przycisków
if(id == 0){ //id 0 dla przycisku “Yes”
super.exit();
}
}
Okienko zwróci 0 dla przycisku “Yes”, 1 dla przysku “No” oraz -1 jeżeli zamkniemy okienko dialogowe wciskając “X”. Następnie można sprawdzić wartość zmiennej “id” i wywołać nienadpisaną wersję metody exit() przy użyciu super.exit() gdy “id” wynosi 1. Wówczas Processing zajmie się resztą i zamknie aplikację.
Do działania dialogów trzeba jeszcze dodać:
import static javax.swing.JOptionPane.*; (tutaj import jako klasa statyczna?)
Całość wygląda więc tak
import javax.swing.JFrame;
import processing.awt.PSurfaceAWT;
import static javax.swing.JOptionPane.*;
void setup(){
size(900,600);
PSurfaceAWT surf = (PSurfaceAWT) getSurface();
PSurfaceAWT.SmoothCanvas canvas = (PSurfaceAWT.SmoothCanvas) surf.getNative();
JFrame jframe = (JFrame) canvas.getFrame(); //uchwyt
jframe.setDefaultCloseOperation(JFrame.DO_NOTHING_ON_CLOSE);
}
void draw(){
rect(100,100, 200, 200);
}
void exit(){
int id = showConfirmDialog(
frame,
"Are you sure?", // message
"Exiting", // tytuł okna
YES_NO_OPTION);
println(id);
if(id == 0){
super.exit();
}
}
I po problemie! Zachęcam do kopiowania tego rozwiząnia — (c)
Bartosz Butler, 2019
 Skoro jest zapis plików, to warto nie stracić swojej pracy przez nieumyślne zamknięcie programu – pojawi się stosowne okienko z potwierdzeniem (było przy
Skoro jest zapis plików, to warto nie stracić swojej pracy przez nieumyślne zamknięcie programu – pojawi się stosowne okienko z potwierdzeniem (było przy 
 Więcej o projekcie Maszyny na
Więcej o projekcie Maszyny na 
 Wspólnie ustaliliśmy, że każdokrotne naciśnięcie przycisku do przodu na pilocie uruchamia silniki na zadany czas (np. 100ms) a następnie je wyłącza. Tak samo z jazdą do tyłu – włączamy odpowiednio silniki (ponownie na 100ms) a potem je wyłączamy (no i ze skrętami tak samo). Wszystko ładnie działało, ale… nie do końca. Silniki są cały czas włączane i wyłączane – a wiadomo, że prąd potrzebny na „rozruch” silnika jest znacznie większy niż podczas jego pracy ze stałą prędkością. Nie ma potrzeby je zatrzymwać, jeśli użytkownik trzyma wciśnięty dany przycisk! Dodatkowo, przy mniejszym czasie pracy silnika (nie 100ms a 50ms czy nawet 20ms) samochód miał „czkawkę” – ciągle uruchamiał i zatrzymywał silniczki. Te dwa powody były wystarczające do zmiany pierwszej wersji kodu – na bardziej zaawansowaną, która nie wyłącza silnika gdy ciągle wciskamy ten sam przycisk. „Czkawka” została (częściowo) opanowana, ale… są błędy w kodzie 🙁 Na dodatek należy obejść (dobrze zaprogramować) błędy w komunikacji pilota na podczerwień z czujką TSOP23xx – przy trzymanym przycisku pojawia się tajemniczy kod ZERO, co przerywa pracę silników. Za tydzień się z tym uporamy!
Wspólnie ustaliliśmy, że każdokrotne naciśnięcie przycisku do przodu na pilocie uruchamia silniki na zadany czas (np. 100ms) a następnie je wyłącza. Tak samo z jazdą do tyłu – włączamy odpowiednio silniki (ponownie na 100ms) a potem je wyłączamy (no i ze skrętami tak samo). Wszystko ładnie działało, ale… nie do końca. Silniki są cały czas włączane i wyłączane – a wiadomo, że prąd potrzebny na „rozruch” silnika jest znacznie większy niż podczas jego pracy ze stałą prędkością. Nie ma potrzeby je zatrzymwać, jeśli użytkownik trzyma wciśnięty dany przycisk! Dodatkowo, przy mniejszym czasie pracy silnika (nie 100ms a 50ms czy nawet 20ms) samochód miał „czkawkę” – ciągle uruchamiał i zatrzymywał silniczki. Te dwa powody były wystarczające do zmiany pierwszej wersji kodu – na bardziej zaawansowaną, która nie wyłącza silnika gdy ciągle wciskamy ten sam przycisk. „Czkawka” została (częściowo) opanowana, ale… są błędy w kodzie 🙁 Na dodatek należy obejść (dobrze zaprogramować) błędy w komunikacji pilota na podczerwień z czujką TSOP23xx – przy trzymanym przycisku pojawia się tajemniczy kod ZERO, co przerywa pracę silników. Za tydzień się z tym uporamy!
 Więcej o projekcie Maszyny na
Więcej o projekcie Maszyny na