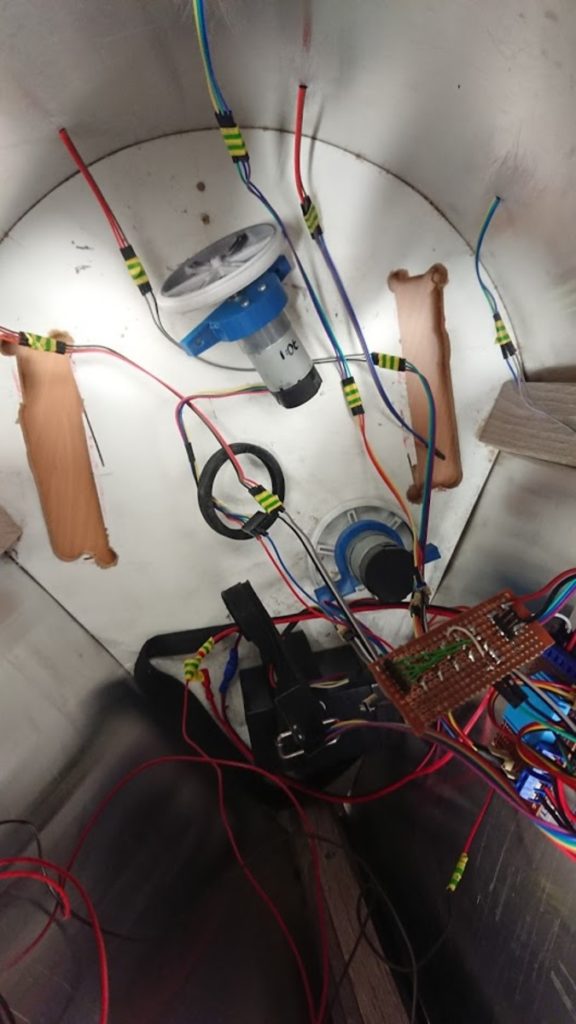
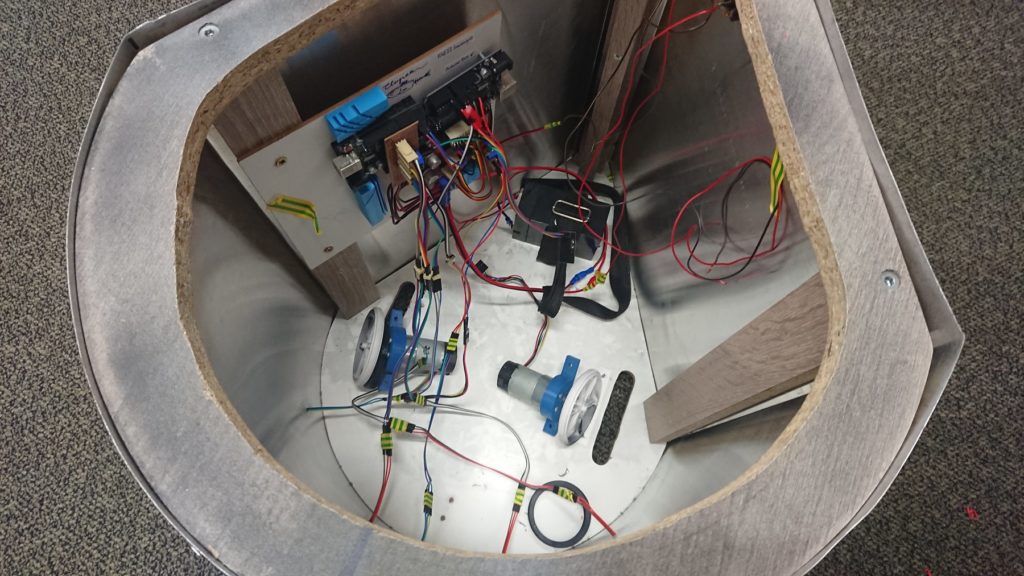
Maskotka – podwozie OK!
Sporo brutalnej „zabawy” w drwala z ręczną piłką 😛 i choć nie wygląda to za dobrze – to zadanie wykonane! Otwory powiększone i koła zamocowane.
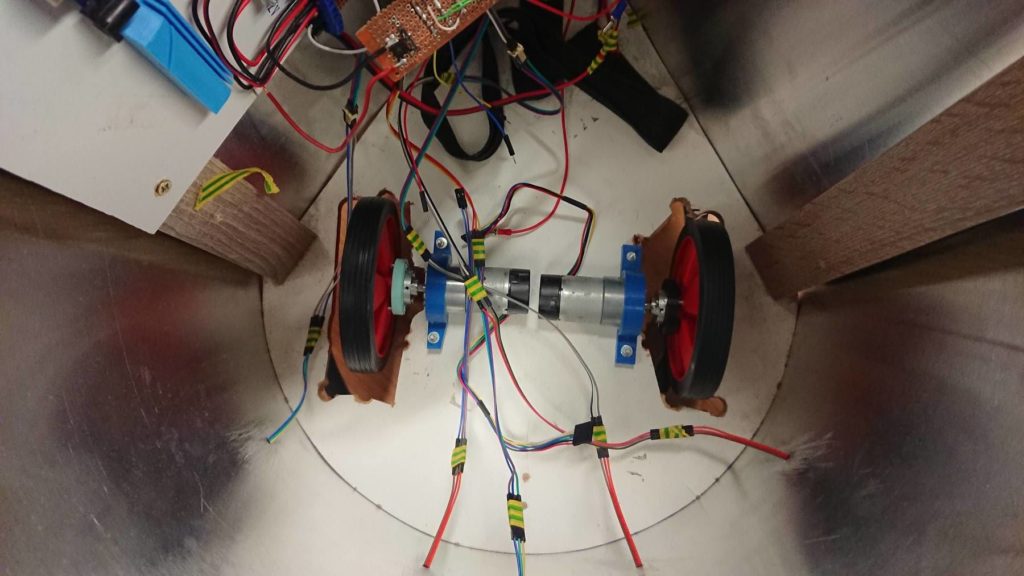
Wypada umieścić słowo wyjaśnienia: nie chcieliśmy zdejmować obudowy Maskotki aby powiększyć te otwory (z pewnością to by ułatwiło sprawę). Obudowa przytwierdzona jest do podwozia wkrętami stolarskimi więc ich ponowne wkręcenie nie gwarantowałoby trzymania obudowy. W takim razie lepiej zrobić nowe otwory – ale to z kolei pozostawi wiele (niepotrzebnych) otworów. Dlatego więc męczyliśmy się z powiększaniem otworów z założoną obudową.
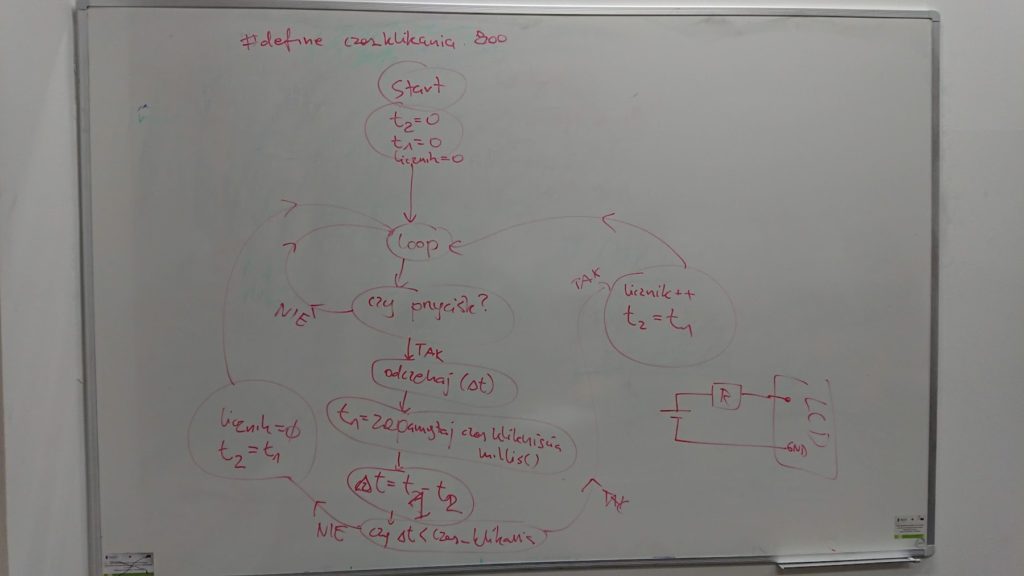
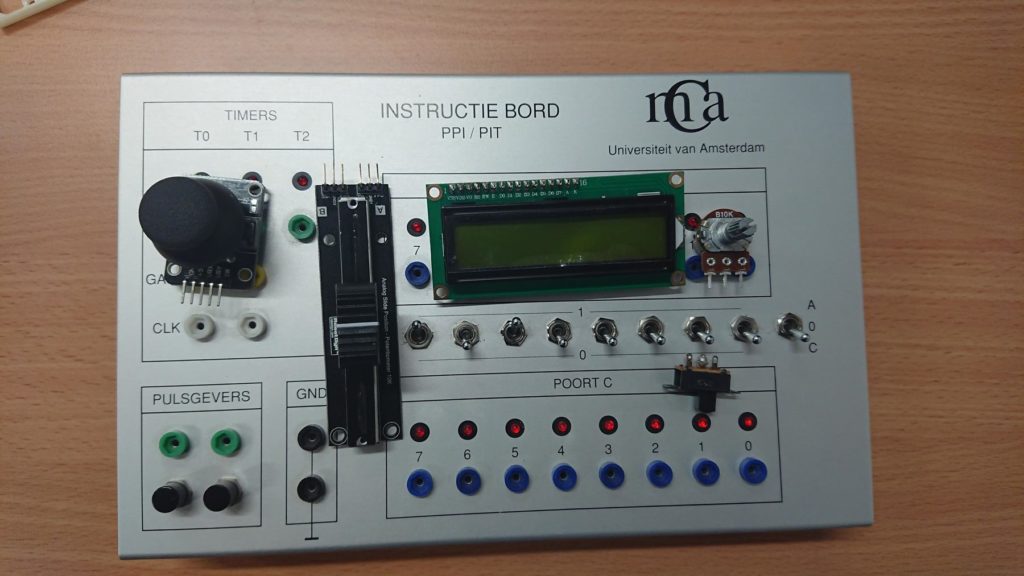
Wieloklik
Sprawa rozwojowa – zliczanie klików to za mało, teraz poprzeczka poszła w górę i Pan Marek zlicza dwukliki i trzykliki (są takie wyrazy w języku polskim? jak nie, to już są ;-).
Więcej na stronie projektu.
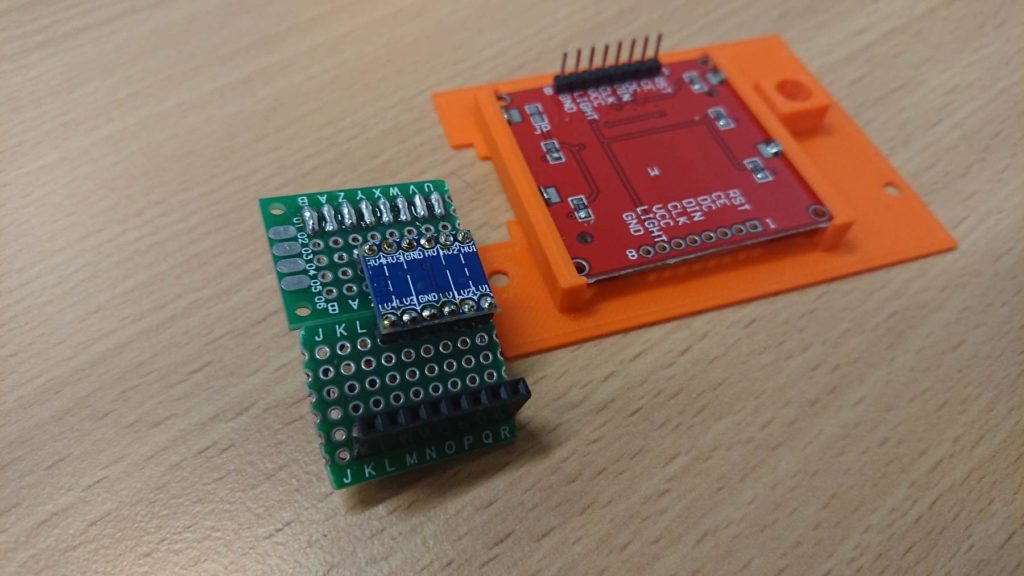
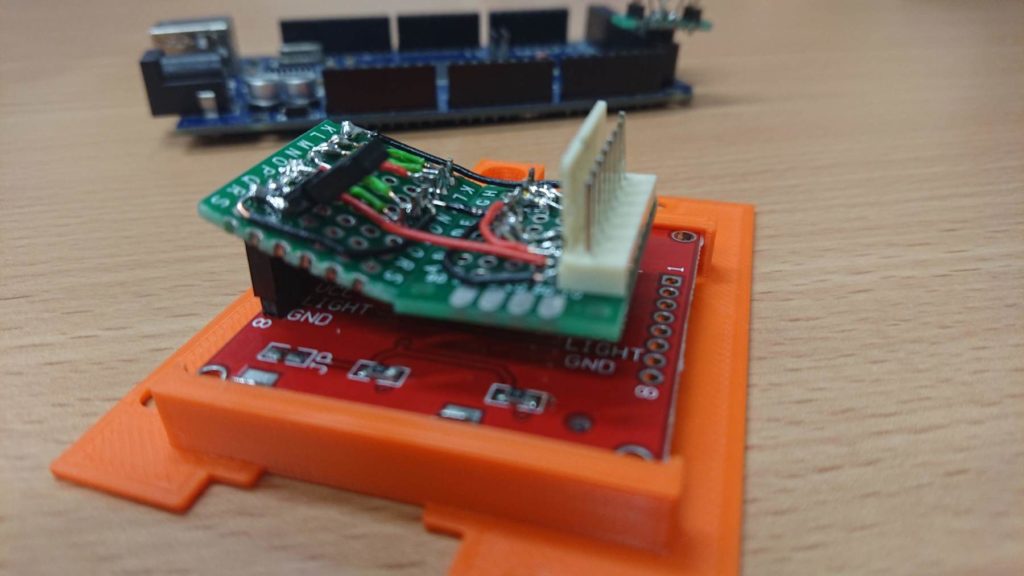
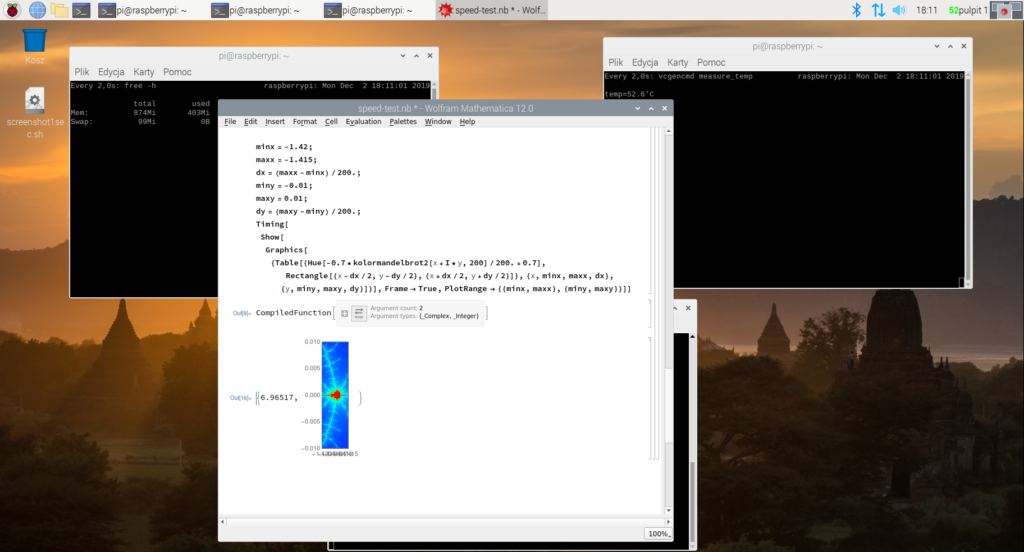
Maszyna 2D3D
Ostatnia prosta – ekranik Nokii. Zamontowany (wszystko udało się upchać do środka!) ale co najważniejsze – działa od pierwszego podłączenia (sam Autor projektu się tym zdziwił). Trzeba było jedynie zmniejszyć kontrast, bo Nokia zasilana przez Arduino podłączone do PC-ta miała inne napięcie niż Nokia zasilana z Arduino z dedykowanym zasilaczem (niby mały szczegół…).

Pan Bartek rozbudował menu – można poruszać się (przewijać) po wszystkich plikach z katalogu na karcie SD, nie tylko kilku pierwszych. To istotne usprawnienie.
Przerwa świąteczna – kiedy kolejne spotkanie?
Zapraszam w piątek 3 stycznia 2020 r. o godz. 12:00.
(c) K.G. 2019