
Sterownik silników L293N
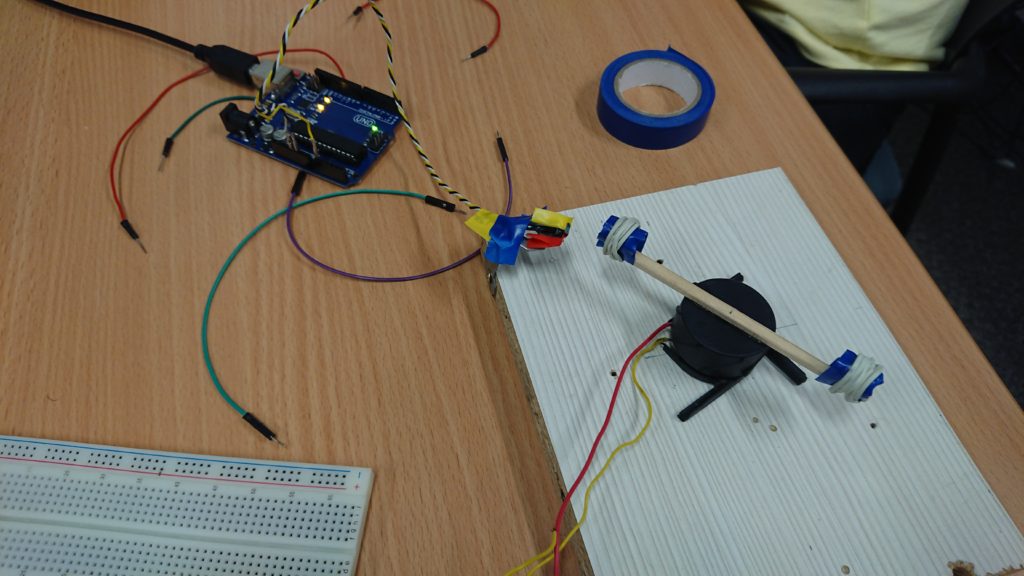
Pan Przemek zapoznał się z sygnałami PWM (obowiązkowy programik „gaszący” LEDa – i funkcja analogWrite) a następnie poznał sterowanie silnikami DC – za pomocą sterownika L293N. Najpierw podłączaliśmy zasilanie 6V z żelowego akumulatorka: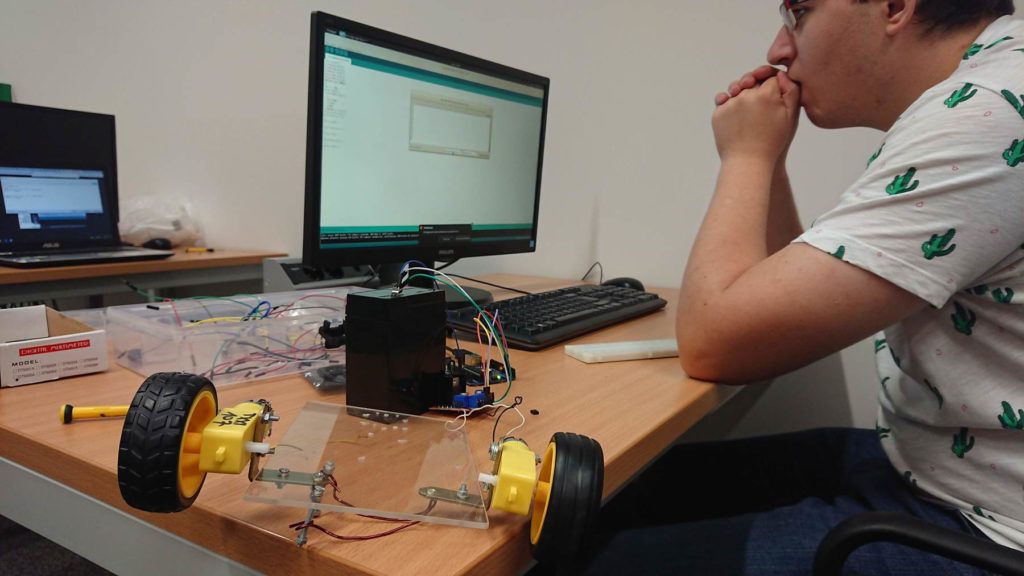 a następnie konstrukcja uległa modyfikacji (w tym także zasilanie) i powstała taka oto platforma testowa:
a następnie konstrukcja uległa modyfikacji (w tym także zasilanie) i powstała taka oto platforma testowa: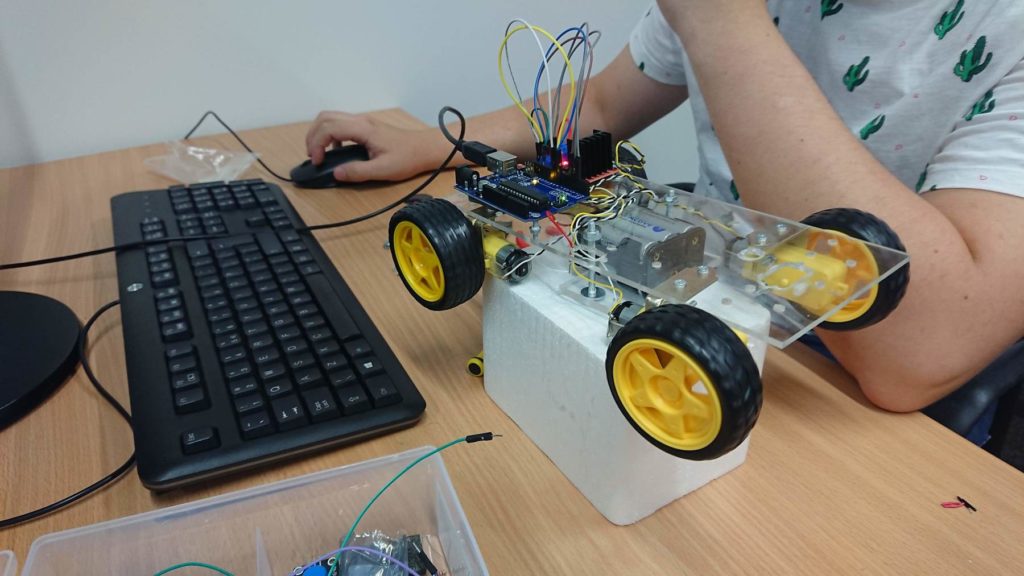 Udało się „nauczyć” jeździć ten pojazd do przodu, tyłu i skręcać. Na razie wykonuje on wszystkie te czynności w kółko – więc jest to mało sensowne. Ale kolejny krok to zdalne sterowanie i ten krok to już duży krok w kierunku Wojny Robotów 😉
Udało się „nauczyć” jeździć ten pojazd do przodu, tyłu i skręcać. Na razie wykonuje on wszystkie te czynności w kółko – więc jest to mało sensowne. Ale kolejny krok to zdalne sterowanie i ten krok to już duży krok w kierunku Wojny Robotów 😉
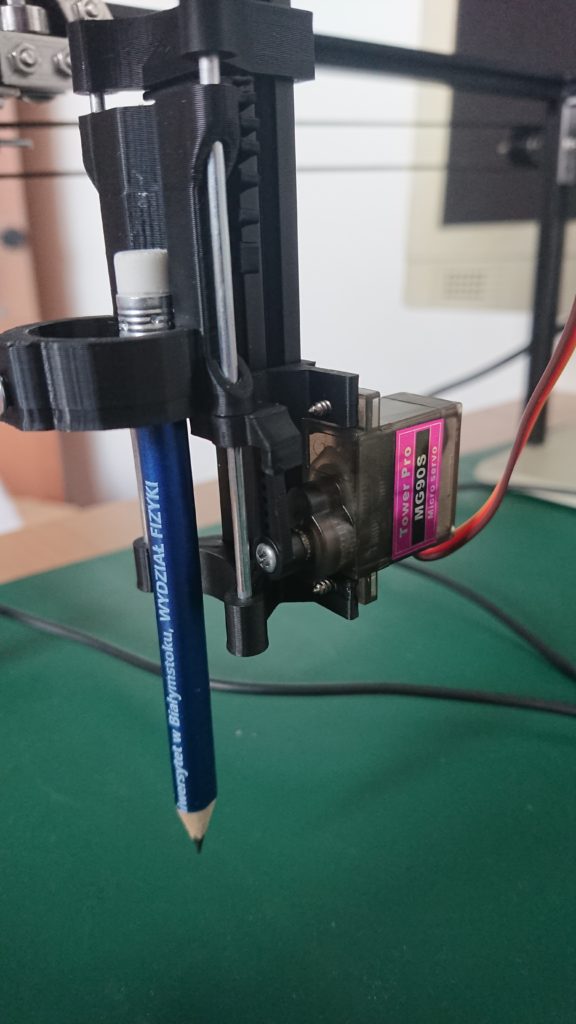
Precyzyjna Maszyna (PM2D3D) – krańcówka
Pan Bartek zamontował krańcówki – wydrukował odpowiednie elementy trzymające.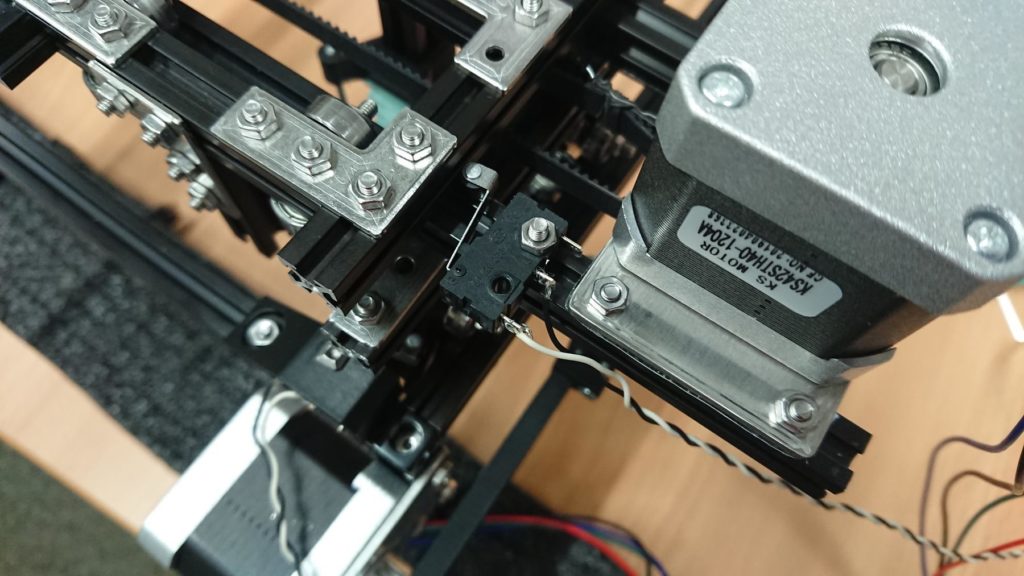
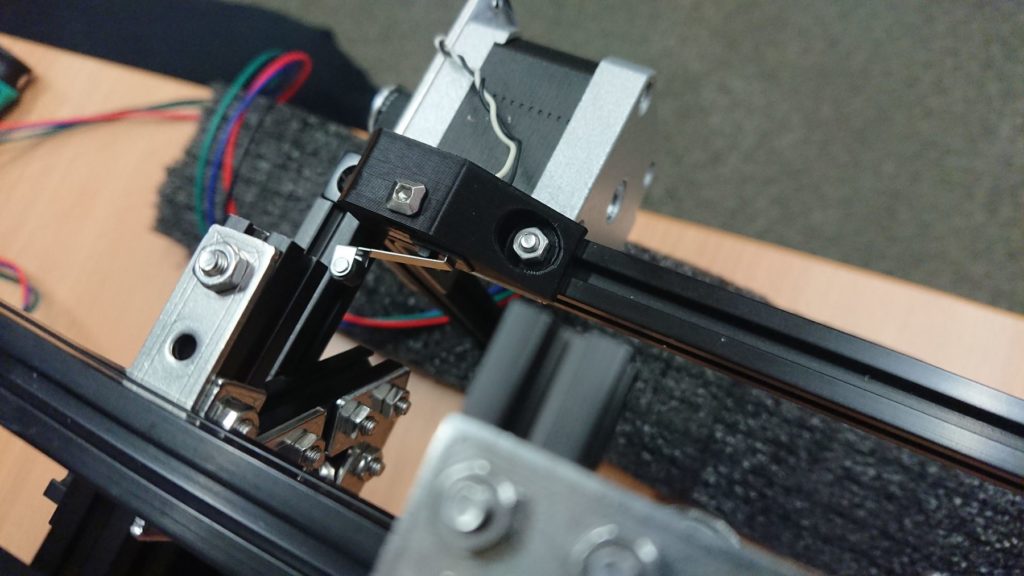 Skoro są już krańcówki, to należy je oprogramować. Drogi są (co najmniej) dwie: 1) w programie realizującym poruszanie silnikami sprawdzamy, co się dzieje z krańcówkami – i w razie czego zatrzymujemy konkretny silnik, lub 2) inicjalizujemy przerwania, które robią to automatycznie. Jednak zanim doszło do tego to… pojawiły się problemy z rysowaniem linii po skosie. Przygotowany przez Pana Bartka kod miał działać – jednak okazało się, że ma wady. Wiadomo – ten się nie myli, kto nic nie robi 😉 Dlatego dzisiejsze zajęcia poszły w kierunku naprawy softwaru… Jeszcze jest trochę roboty 😉
Więcej o projekcie Maszyny na stronie projektu.
Skoro są już krańcówki, to należy je oprogramować. Drogi są (co najmniej) dwie: 1) w programie realizującym poruszanie silnikami sprawdzamy, co się dzieje z krańcówkami – i w razie czego zatrzymujemy konkretny silnik, lub 2) inicjalizujemy przerwania, które robią to automatycznie. Jednak zanim doszło do tego to… pojawiły się problemy z rysowaniem linii po skosie. Przygotowany przez Pana Bartka kod miał działać – jednak okazało się, że ma wady. Wiadomo – ten się nie myli, kto nic nie robi 😉 Dlatego dzisiejsze zajęcia poszły w kierunku naprawy softwaru… Jeszcze jest trochę roboty 😉
Więcej o projekcie Maszyny na stronie projektu.
(c) K.G.
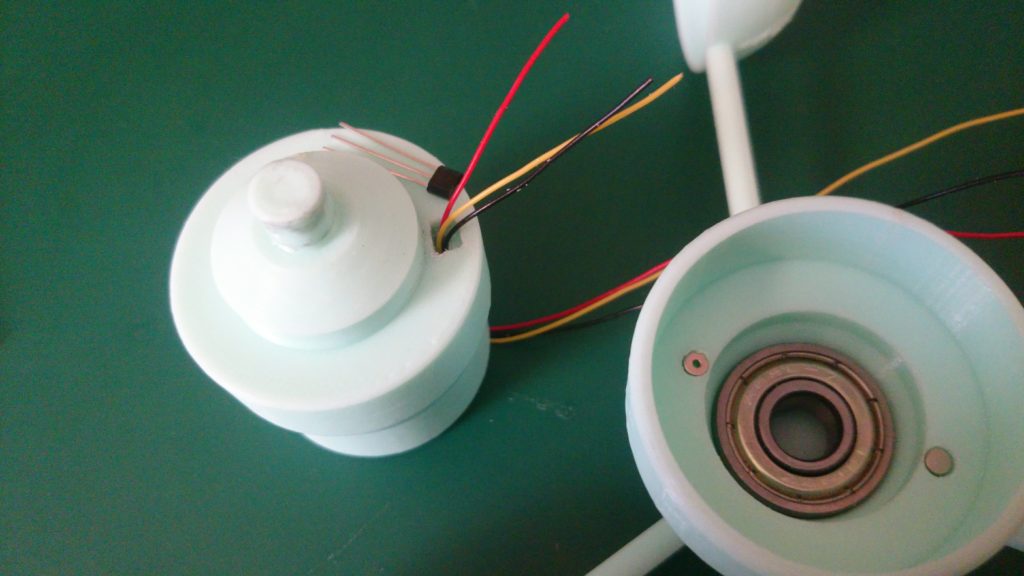
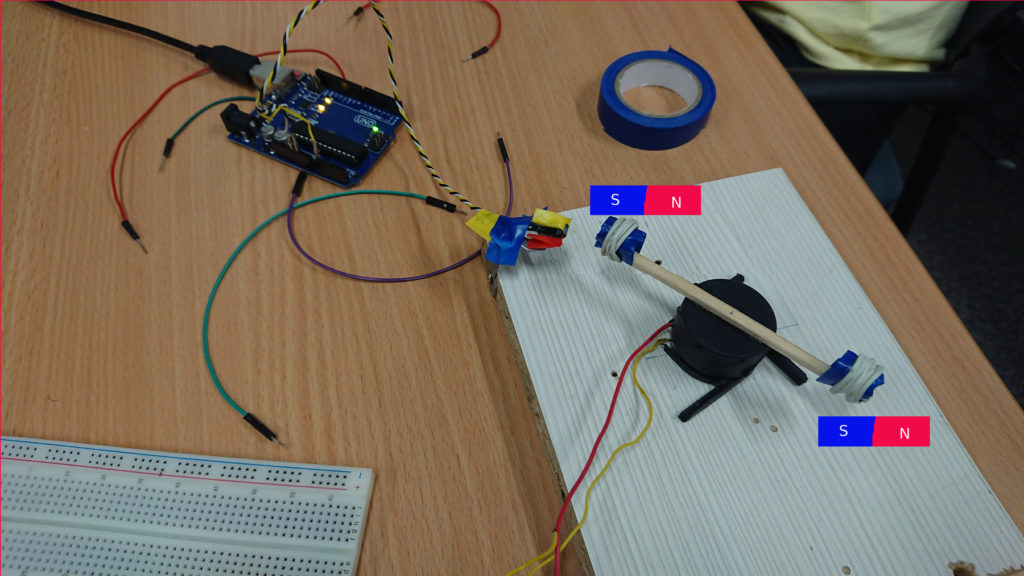 W układzie celowo zamontowano magnesy tak, by czujka SS49E „widziała” raz biegun północny (N) magnesu, a za drugim razem (gdy silniczek obróci sie o 180 stopni) biegun południowy (S). Ustawienie magnesów na końcach patyka nie jest więc przypadkowe 😉 Czujnik SS49E odczytuje zarówno biegun S jak i N (uwaga: nie wszystkie czujki pola magnetycznego, bazującego na efekcie Halla, tak mają – warto to sprawdzić przed zakupejm), dlatego widzimy dwa „piki” podczas obracania silniczka – jeden „do góry” (większe napięcie) oraz „do dołu” (napięcie mniejsze). Z dala od magnesów czujka zwraca napięcie ~2.5V informując, że wartość pola magnetycznego jest (około) zera. Poniżej wykres z Kreślarki
W układzie celowo zamontowano magnesy tak, by czujka SS49E „widziała” raz biegun północny (N) magnesu, a za drugim razem (gdy silniczek obróci sie o 180 stopni) biegun południowy (S). Ustawienie magnesów na końcach patyka nie jest więc przypadkowe 😉 Czujnik SS49E odczytuje zarówno biegun S jak i N (uwaga: nie wszystkie czujki pola magnetycznego, bazującego na efekcie Halla, tak mają – warto to sprawdzić przed zakupejm), dlatego widzimy dwa „piki” podczas obracania silniczka – jeden „do góry” (większe napięcie) oraz „do dołu” (napięcie mniejsze). Z dala od magnesów czujka zwraca napięcie ~2.5V informując, że wartość pola magnetycznego jest (około) zera. Poniżej wykres z Kreślarki
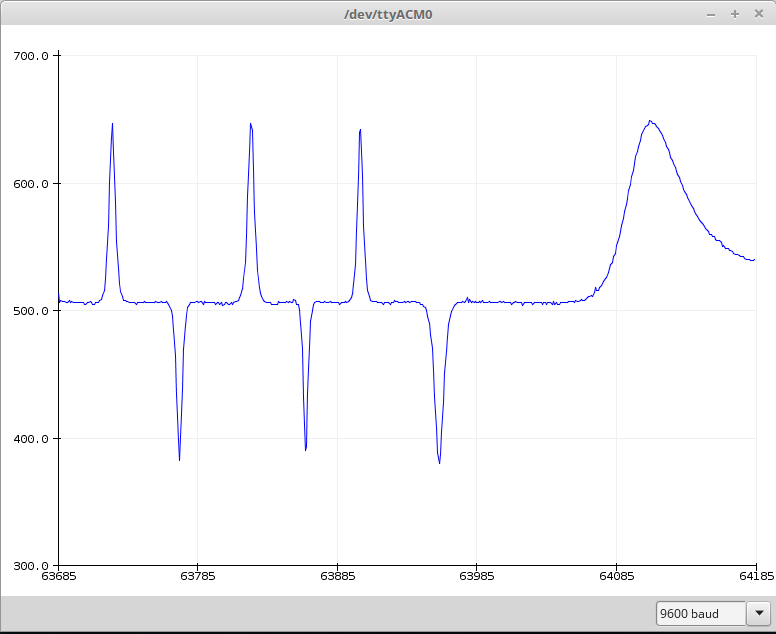 Program zliczający liczbę obrotów na sekundę (zmienna czas – aktualnie 1000ms, ale można zmienić, także przez krotność – zmienna krok). Algorytm polega na znajdowaniu maksimum i minimum napięcia – a zapisywane jest moment ich wystąpienia (do zmiennych t_1oraz t_2, odpowiednio). Różnica tych czasów do pół obrotu.
Program zliczający liczbę obrotów na sekundę (zmienna czas – aktualnie 1000ms, ale można zmienić, także przez krotność – zmienna krok). Algorytm polega na znajdowaniu maksimum i minimum napięcia – a zapisywane jest moment ich wystąpienia (do zmiennych t_1oraz t_2, odpowiednio). Różnica tych czasów do pół obrotu.
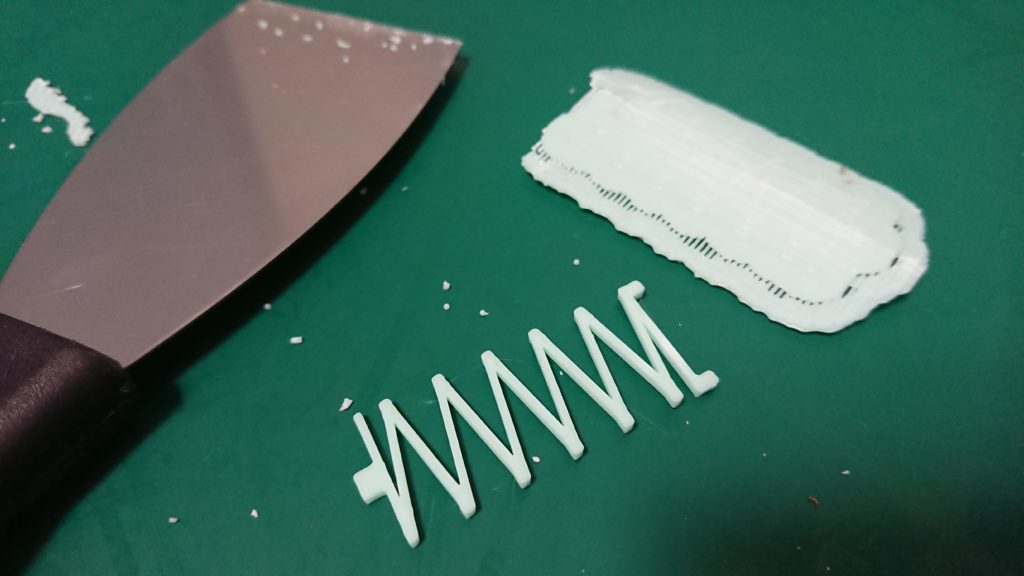
 Nowy model powinien być lepszy – bo wydrukowany z Z-Ultratu:
Nowy model powinien być lepszy – bo wydrukowany z Z-Ultratu:
 No i mamy coraz lepszą pracę Maszyny:
Więcej o projekcie Maszyny na
No i mamy coraz lepszą pracę Maszyny:
Więcej o projekcie Maszyny na 
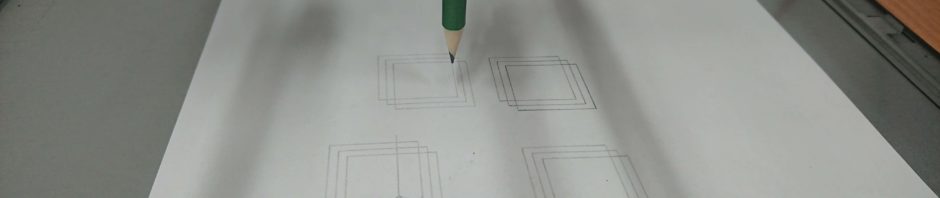
 No i kolejny (próbny) precyzyjny rysunek:
Opis całego proejktu Maszyny pod
No i kolejny (próbny) precyzyjny rysunek:
Opis całego proejktu Maszyny pod 
 A po co nam zliczanie tych obrotów? Zastosowań jest wiele, jednym z nich jest mierzenie prędkości wiatru takim prostym urządzeniem:
A po co nam zliczanie tych obrotów? Zastosowań jest wiele, jednym z nich jest mierzenie prędkości wiatru takim prostym urządzeniem:
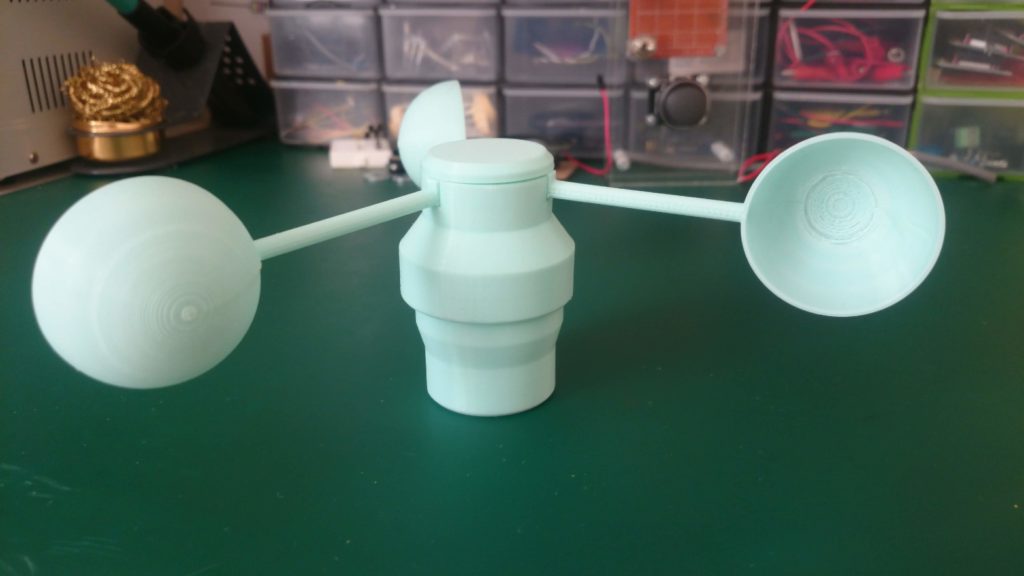 w środku którego znajdują się: czujka SS49E, dwa magnesy oraz łożysko kulkowe (typ 682ZZ).
w środku którego znajdują się: czujka SS49E, dwa magnesy oraz łożysko kulkowe (typ 682ZZ).
 O dalszych losach tego projektu niebawem…
O dalszych losach tego projektu niebawem…