Poznaliśmy odbiornik podczerwieni TSOP 2236.
#define VCC 13
#define IR 12
#include <IRLib.h>
IRrecv pilot(IR);//pin
IRdecode dekoder;
void setup(){
pinMode(VCC, OUTPUT);
digitalWrite(VCC, 1);//wlaczamy napiecie dla odbiornika IR
pilot.enableIRIn();//uruchamiamy odbiornik IR
Serial.begin(9600);
}
void loop()
{
if (pilot.GetResults(&dekoder)) {
dekoder.decode(); //dekoduj dane
pilot.resume(); //restartuj odbiornik
Serial.print("0x");
Serial.println(dekoder.value, HEX);//szesnastkowo - tak tylko...
}//if
}/loop
W powyższym przykładzie zakładam, że pilot odbiornik IR podłączony był bezpośrednio do płytki Arduino o tak:
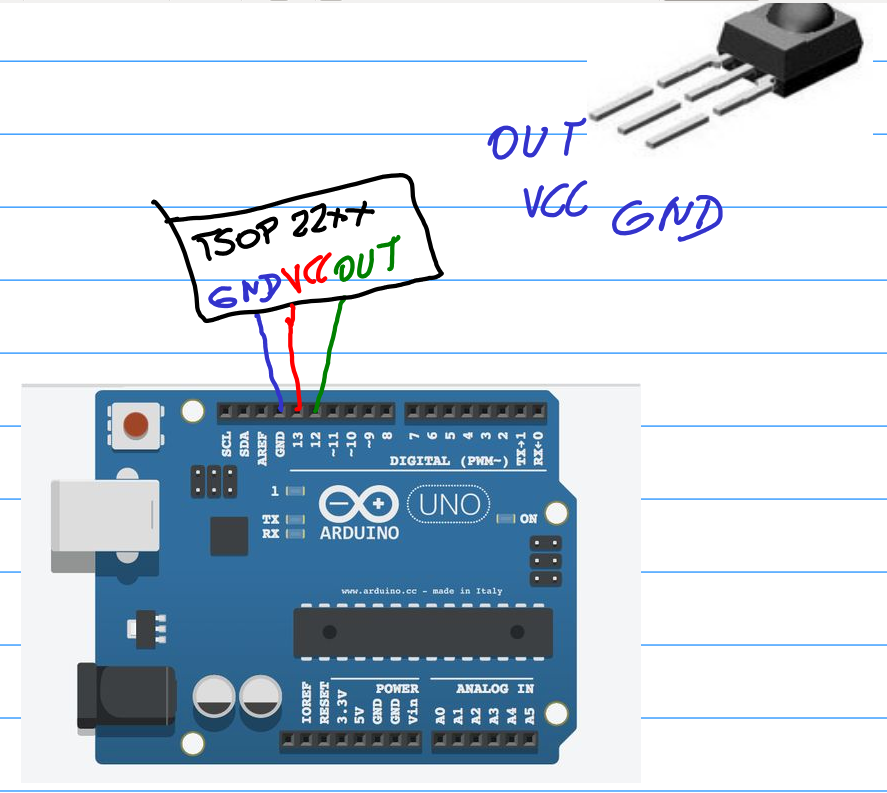
co jest bardzo stabilne i (warto podkreślić) nie wymaga płytki stykowej. Wszystko zgodnie ze specyfikacją – odbiornik IR dostaje zasilanie 5V z pinu #13 Arduina, a wymagany prąd to tylko 5mA (czy pamiętasz, jakim maksymalnie prądem można obciążyć piny cyfrowe Arduino?). Dlatego na początku kodu pojawia się deklaracja VCC i włączenie tego pinu. Reszta zgodna z biblioteką IRLib – nie musimy bawić się w dekodowanie sygnału, wszystko zostało zrobione przez Chris Younga – dziękujemy!
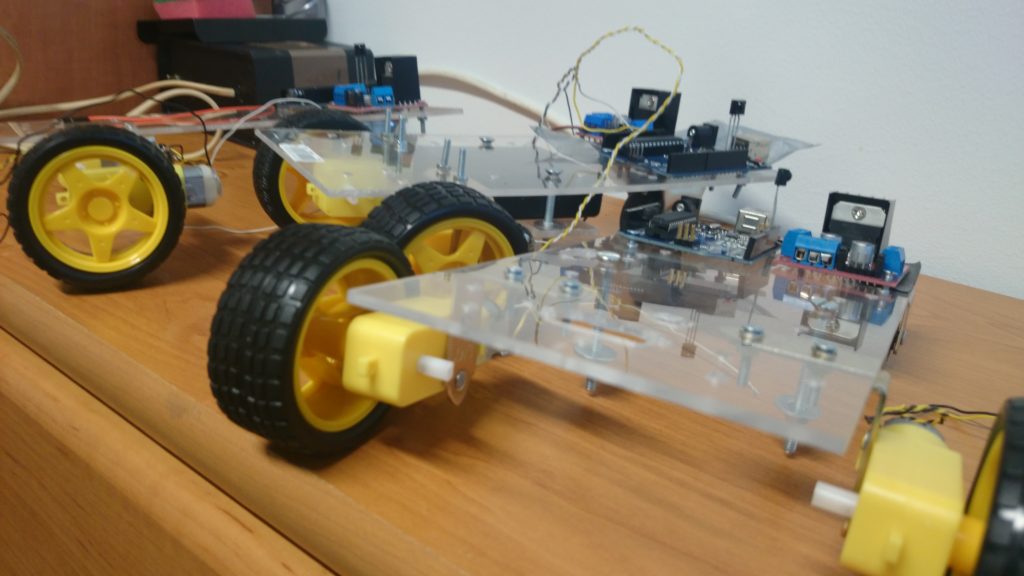
Dodatkowo: zbudowaliśmy platformę pojazdu, którą za tydzień – będziemy sterować pilotem od TV. Jak widać stawiam na prostotę i możliwość późniejszej rozbudowy – dlatego nasze pojazdy są dość sporych rozmiarów. Zachęcam do tego typu prac ręcznych.
Kolejne zajęcia – także we wtorek 16:00 – sterujemy pilotem platformą – nie zapomnijcie przynieść ze sobą pilota od TV/radia/odkurzacza. Zapraszam!