Pan Bartek napracował się nad przeniesiem elektroniki na konstrukcję heXapoda. Na zajęciach odbyło się pierwsze włączenie (zasilanie na spodzie pająka) i… udało się. Nic nie wybuchło 😉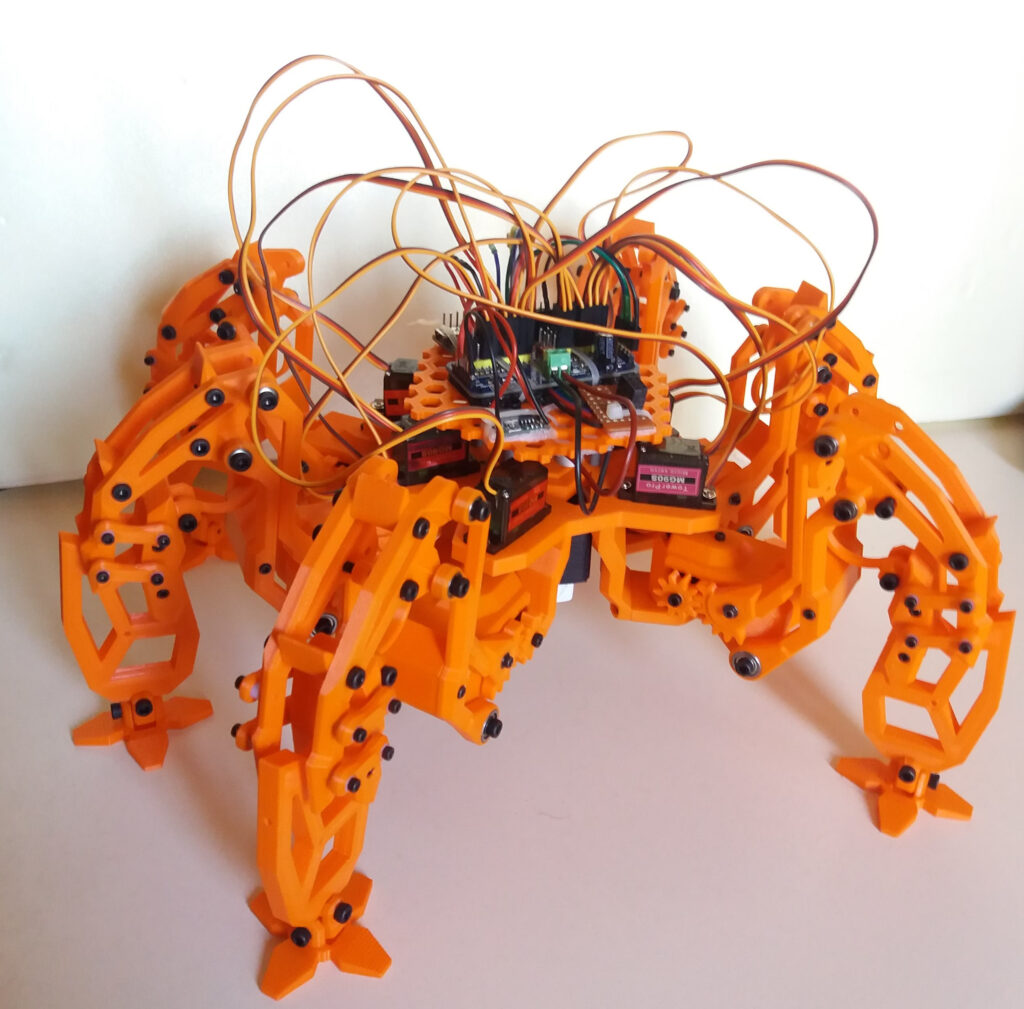
Łódź podwodna?
Pan Łukasz: są chęci do pracy nad projektem zaproponowanym w poprzenim tygodniu. W planach jest konstrukcja strzykawki sterowanej Arduino: mechanizm poruszania tłoczka (niezbędny do łodzi w celu zanurzenia/wynurzenia). Prace na razie koncepcyjne, ale kto wie jak się to zakończy.
Powyżej model „na szybko” autorstwa Pana Łukasza – mikro serwo obraca przekładnię, a ten drugi ząbkowany element ciągnie tłoczek strzykawki. Można drukować w 3D, ale Pan Łukasz na razie będzie kombinował bez druku – z elementów dostępnych „pod ręką”. Jeśli coś z tego wyjdzie, będzie nowy projekt 😉 A jeśli elementy „spod ręki” nie wypalą – będzie trzeba drukować (nie ma z tym problemu).
KG (c) 2020, zajęcia w formie e-spotkania
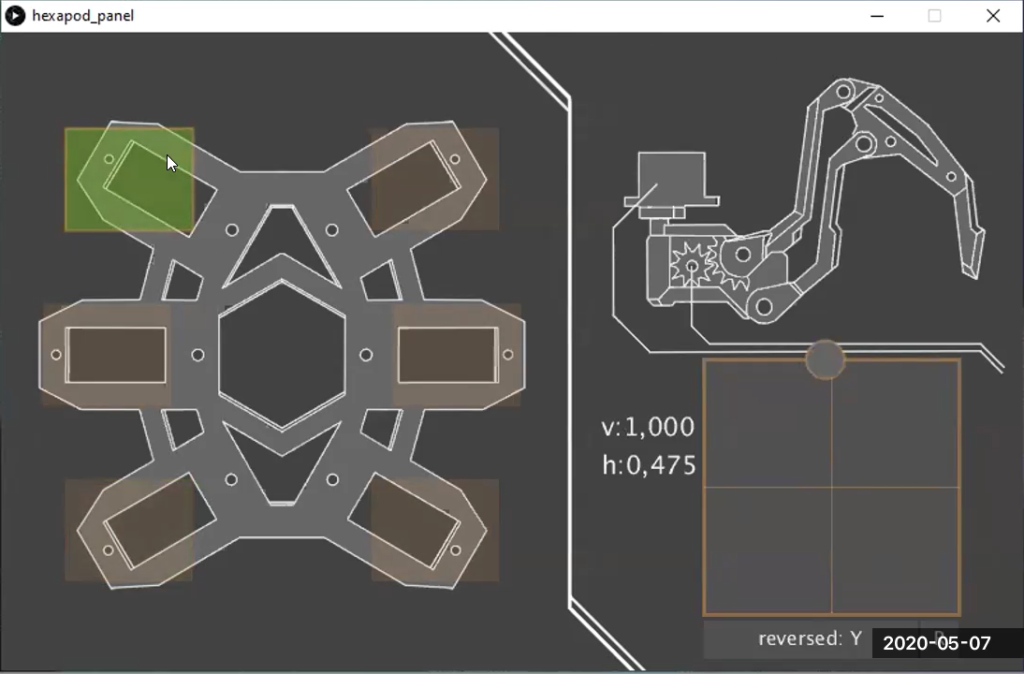 Powyżej widzimy panel konstruktorski do sterowania nogami heXapoda. W lewej części ekranu myszką wybieramy jedną z 6-ciu nóg (podświetli się na zielonkawy kolor) a następnie zmieniamy jej położenie w prawej części (myszą zmieniając położenie kulki w kwadracie). Ustawione w ten sposób położenie (współrzędne v,h) zostają przeliczone na odpowiednie nastawy serwomechanizmów w wybranej nodze. Więcej na
Powyżej widzimy panel konstruktorski do sterowania nogami heXapoda. W lewej części ekranu myszką wybieramy jedną z 6-ciu nóg (podświetli się na zielonkawy kolor) a następnie zmieniamy jej położenie w prawej części (myszą zmieniając położenie kulki w kwadracie). Ustawione w ten sposób położenie (współrzędne v,h) zostają przeliczone na odpowiednie nastawy serwomechanizmów w wybranej nodze. Więcej na