Ogłaszam przerwę w spotkaniach Fi-BOTa na czas 30 styczeń – 14 luty 2017. Proszę poświęcić się przygotowaniom do sesji. Życzę powodzenia w zaliczeniach i widzimy się 20-go lutego (wtorek, jak zawsze 16:00).
KG
Ogłaszam przerwę w spotkaniach Fi-BOTa na czas 30 styczeń – 14 luty 2017. Proszę poświęcić się przygotowaniom do sesji. Życzę powodzenia w zaliczeniach i widzimy się 20-go lutego (wtorek, jak zawsze 16:00).
KG

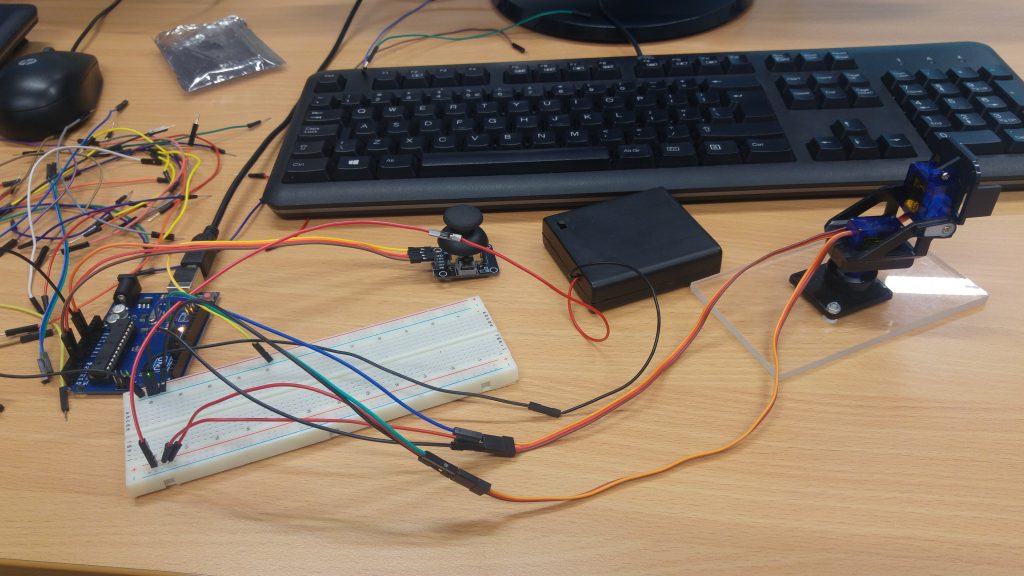
Na zajęciach sterowaliśmy serwomechanizmami za pomocą joysticka. Na początku używaliśmy niewielkiego modułu z joystickiem podłączanego bezpośrednio do Arduino. W drugiej części użyliśmy nakładki (shield) na Arduino z joystickiem oraz czterema przyciskami (podobnie jak na gamepadach).
Moduł posiada pięć pinów. GND oraz 5V podłączamy do Arduino. VRx i VRy to piny sterujące odpowiednio osią OX (czyli lewo-prawo) oraz OY (czyli góra-dół). Podłączamy je do pinów analogowych. Ostatni pin odpowiada za przycisk, jednak nie używaliśmy go w tym zadaniu.

Prosty program wyświetlający położenie joystika
void setup(){
Serial.begin(9600);
}
int x,y;
void loop(){
x = analogRead(A0);
y = analogRead(A1);
Serial.print("x=");
Serial.print(x);
Serial.print(", y=");
Serial.println(y);
}
Położenie na osi OX (także OY) to liczby z zakresu 0..1023. Położenie spoczynkowe powinno odpowiadać wartości 511 (liczby 0..510 to wychylenie w lewo, liczby 512..1023 to wychylenie w prawo). Użycie tego programu pozwoliło nam sprawdzić, że tak jednak nie jest – u nas joy w położeniu spoczynkowym miał wartości 514, 517 (oś OX i OY).
Podczas działania tego programu możemy postawić sobie następujące zadanie: ustawić pozycję joy-a w takim położeniu, aby odczyty były x=800 y=200. Okazuje się to jednak bardzo trudne! Widzimy więc, że sterowanie joy-em nie jest łatwe i wymaga sporo wprawy.
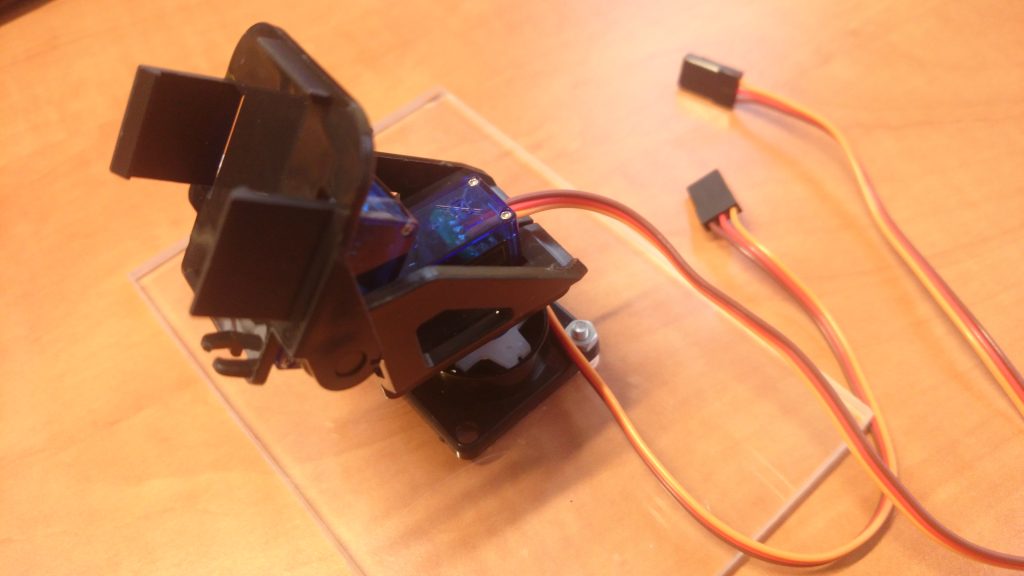
Używana przez nas wieżyczka (do której można przyczepić, np. kamerkę internetową by nią sterować) składała się z dwóch serw na podstawce. Umożliwia to poruszanie się mechanizmu na boki oraz w górę i dół.
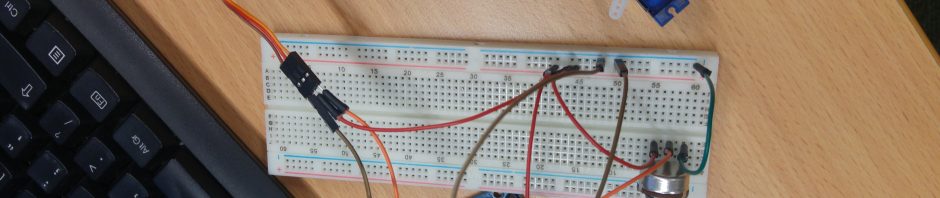
Wszystkie potrzebne elementy połączyliśmy za pomocą płytki prototypowej. Zamiast zasilania z Arduino użyliśmy zewnętrznego koszyka na 4 baterie o łącznym napięciu 5V. Dlaczego tak zrobiliśmy? Chodziło nam o oddzielne zasilanie silników aby nie przeciążyć płytki Arduino – pojedyncze serwo może pobrać nawet 200mA prądu (co sprawdzaliśmy na poprzednich zajęciach), a wydajność prądowa Arduino UNO to około 200-400 mA. Dlatego dwa takie serwa mogą uszkodzić naszą płytkę. My użyliśmy oddzielnego zasilania silników aby temu zapobiec. WAŻNE: w przypadku używania kilku źródeł zasilania (u nas Arduino 5V i 4x baterie AAA) musimy uwspólnilić masy (GDN z Arduino, „minus” z bateryjki).
Użyliśmy płytki prototypowej, gdzie na jednej szynie (koloru niebieskiego) wetknęliśmy „-” z koszyka baterii oraz GND Arduino. Do tej „szyny” podłączone były masy serw (przewody koloru brązowego). Druga szyna (czerwona – z drugiej strony płytki, dla naszej wygody) doprowadzone miała przewód „+” z koszyka baterii i tam podłączone były zasilania silników serw (czerwone przewody serw). UWAGA: nie można łączyć pinu 5V Arduino z zewnętrznym zasilaniem baterii – może to spowodować uszkodzenie płytki! Łączymy (=uwspólniamy) jedynie masy. Przewody sterujące serwami (koloru żółtego) podłączyliśmy do pinów PWM Arduino UNO – u nas #3 i #5.
Na początku standardowo dołączamy do programu bibliotekę umożliwiającą sterowanie serwami. Następnie dodajemy zmienne do obu serw, jedno odpowiedzialne za ruch góra-dół, a drugie lewo-prawo.
#include <Servo.h>
Servo GoraDol;
Servo LewoPrawo;
void setup (){
Serial.begin(9600);
GoraDol.attach(3);
LewoPrawo.attach(5);
}
int x,y;
W kolejnej części deklarujemy zmienne odpowiadające za położenie obu osi joysticka – dokładnie tak, jak w pierwszym programie odczytującym położenia joy-a. Wyświetlamy wartości x oraz y w monitorze szeregowym. Joystick zwykle nie jest idealnie skalibrowany, jednak nie ma to znaczenia przy niewielkiej precyzji.
Funkcja map pozwala na łatwe proporcjonalne przeliczenie wartości. Używamy jej, ponieważ położenia joysticka są z zakresiu 0-1023, natomiast sterowanie serwem chcemy wyrażamy w stopniach 0-180. Wynik przypisujemy od razu do zmiennych x oraz y (używamy tych samych zmiennych, niszcząc ich poprzednie wartości). W argumentach funkcji wpisujemy zmienną do przeliczenia, następnie jej obecny zakres i na końcu zakres po zamianie. Po przeliczeniu wartości możemy je przekazać do serwomechanizmów.
x=map(x,0,1023,0,180); //funkcja map LewoPrawo.write(x); y=map(y,0,1023,0,180); GoraDol.write(y); delay(10);

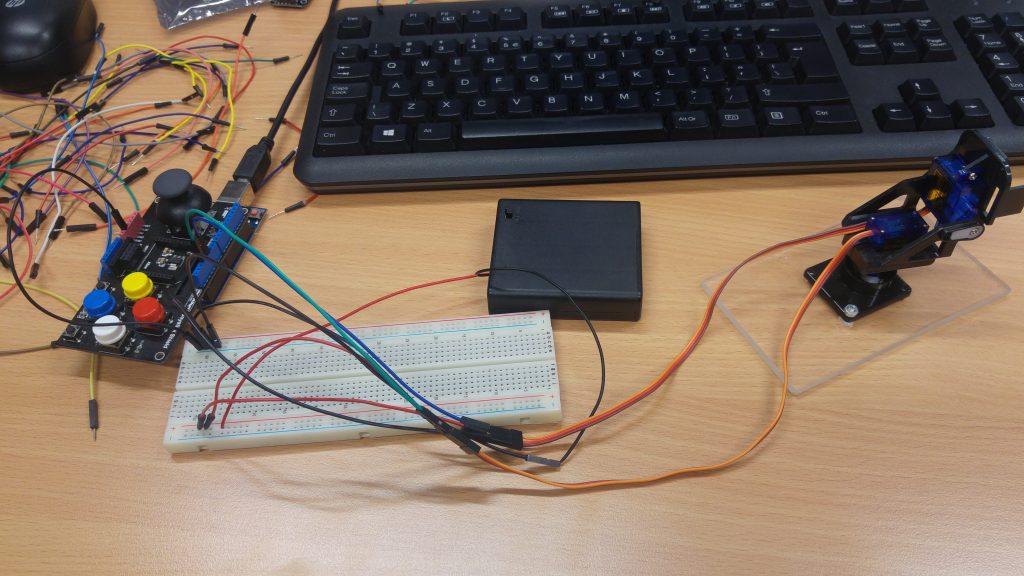
Fajnym rozwiązaniem jest wykorzystanie specjalnej nakładki (shield), która poszerza możliwości Arduino. Piny obu komponentów pasują do siebie, więc nie da się pomylić przy wpinaniu nakładki. Joystick oraz przyciski są fabrycznie podłączone do pinów, więc nie musimy tego robić w programie. Na nakładce wszystkie piny są podpisane, więc później będziemy tylko operować odpowiednimi oznaczeniami pinów.
Program sterujący jest bardzo podobny do poprzedniego. Jedyną różnicą jest brak podłączenia pinów cyfrowych. Dodatkową funkcją, którą wprowadzamy do naszego programu, jest zatrzymywanie serwa w ustawionej pozycji. Chcemy aby wciśnięcie wybranego przycisku (np. koloru czerwonego) zablokowywało dalsze sterowanie wieżyczką. Kolejne wciśnięcie tego przycisku powoduje odblokowanie sterowania. W tym celu do kodu wprowadzamy zmienną typu logicznego bool (nazwaną tryb) i ustawiamy ją na wartość true. Następnie wybieramy przycisk (np. ten czerwony), który ma sterować zatrzymaniem serwa i sprawdzamy, który numer pinu u odpowiada. W naszym programie jest to pin 5. Tworzymy instrukcję sterującą if, która wykona się po wciśnięciu przycisku. Do wartości zmiennej tryb, przypisujemy jej odwrotność. Czyli jeśli tryb jest true, zostanie zmieniony na false i odwrotnie. Funkcja delay() wprowadzamy aby zarejestrować tylko jedną zmianę ustawienia przycisku (przyciski lubią „drgać” co powoduje nie jeden „klik” a wiele takich „klików” – opóźnienie je zniweluje). Działa to w taki sposób, że jeśli tryb jest wartością false, czyli zostanie raz zmieniony we wcześniejszym if’ie, sterowanie joyem zostaje zablokowane. Natomiast po kolejnym użyciu przycisku, tryb zmieni się z false na true, a sterowanie zostanie odblokowane.
bool tryb=true;
void loop(){
x=analogRead(A0);
y=analogRead(A1);
if (digitalRead(5)==HIGH){
tryb=!tryb;
delay(50);
}
if(tryb==true){
x=map(x,0,1023,0,180); //funkcja map
LewoPrawo.write(x);
y=map(y,0,1023,0,180);
GoraDol.write(y);
}
}
Jak można zauważyć programy umożliwiające sterowanie servami nie są skomplikowane ani długie. Można sprytnie wykorzystać komponenty posiadające więcej niż jedną oś ruchu, dzięki czemu nasze możliwości się poszerzają. Jednak precyzyjne sterowanie takimi joystikami nie jest łatwe…
(c) Ewelina, KG 2017
Na ostatnich zajęciach łączyliśmy wiedzę nabytą na dwóch poprzednich spotkaniach, czyli działanie potencjometru oraz serva. Chcieliśmy wykorzystać możliwość zmiany nastawy potencjometru, w celu sterowania ramionami serwomechanizmu. Podobnie jak na zajęciach przedświątecznych, wykorzystamy do tego komendy biblioteki sterującej servami.

#include <Servo.h>
Servo silnik;
void setup (){
Serial.begin(9600);
silnik.attach(3);
}
Servo podłączamy tak samo jak na przedświątecznych zajęciach, jednak w tym przypadku używamy 3 pinu, a sam mechanizm nazywamy silnikiem (linia #2 i #6).
int pot;
void loop(){
pot=analogRead(A0);//odczytujemy liczby z zakresu od 0 do 1023
pot=pot*180.0/1023;//zamienimy na liczby od 0 do 180
Serial.print(pot);
silnik.write(pot);
}
Na początku deklarujemy zmienną zapisującą stan potencjometru. W ciele funkcji void loop() podłączamy potencjometr do portu analogowego A0. Linia #4 przelicza zakres potencjometru. Jak pamiętamy, wynosi on od 0 do 1023, natomiast stopnie wychylenia serva chcemy wyrażać w zakresie 0-180. 180 konwertujemy na zmienną typu float dopisując do niej część dziesiętną w celu uniknięcia dzielenia całkowitego. W innym wypadku otrzymywalibyśmy nieprawdziwe wyniki, ponieważ wynikiem dzielenia 180/1023 zawsze będzie 0, przez co całe działanie również wyniesie 0. Przy zapisie 180.0/1023 mamy do czynienia z dzieleniem rzeczywistym, którego wynikiem będzie liczba rzeczywista. Następnie przy przemnożeniu przez zmienną całkowitą pot dostaniemy również liczbę rzeczywistą. Ostateczny wynik jest rzutowany na liczbę całkowitą w momencie przypisania operatorem równości.
W celu ulepszenia naszego kodu, chcieliśmy aby położenie ramion serwa było aktualizowane jedynie wtedy, kiedy zmienimy położenie potencjometru. Tym samym chcemy uniknąć sytuacji wydawania polecenia „ustaw serwo na pozycję XX” jeśli właśnie aktualną pozycją jest XX (nie ma to sensu, mimo tego, że to działa – jak w naszym pierwszym, prostym programie). Użyliśmy do tego instrukcji sterującej if. W linii #1 dopisaliśmy kolejną zmienną nazwaną old, która ma za zadanie zapisywać poprzedni stan położenia potencjometru (odczytanego napięcia). W warunkach if-a sprawdzamy, czy zmienna pot (czyli aktualny stan potencjometru), różni się od zmiennej old (czyli jego poprzedni stan). Jeśli nie, funkcja Serial.print() nic nie wypisze i nie zmieniamy położenia serwa. W przeciwnym przypadku zostanie wypisane nowe napięcie, a ramiona serwa zmienią położenie. Na końcu przypisujemy zmienną old do pot, aby móc dokonać nowego porównania w kolejnej iteracji pętli.
int pot, old; //old - zmienna zapisujaca poprzedni odczyt
void loop(){
pot=analogRead(A0);
pot=pot*180.0/1023.0;
if (pot!=old){ //aby zmieniac polozenie tylko wtedy, kiedy sie zmienilo, a nie wyswietlac polozenie ciagle
Serial.print(pot);
silnik.write(pot);
old=pot;
}
}
Dzięki naszemu programowi możemy sterować ramionami serwa kręcąc potencjometrem. Przeliczenie wartości napięcia na stopnie umożliwia dość precyzyjne ustawienie serva.
2018, Ewelina (c)
Sygnały analogowe to takie sygnały elektroniczne, które możemy zapisywac nie tylko jako 0 lub 1 (tak/nie, prawda/fałsz – tylko dwie wartości), ale w wielu „odcieniach” – w końcu pomiędzy zerem a jedynką jest nieskończenie wiele liczb. Oczywiście w informatyce wszystko musi byc skończone, tak więc tych „odcieni” (poziomów pomiędzy zerem a jedynką) jest skończona liczba. Układ zamianiający sygnał elektroniczny na informację cyfrową nazywa się konwerter analogowo cyffrowy (DAC) i mówiąc o nim podajemy jego zakres – liczbę bitów. Dla 8-bitowego DACa mamy wartości sygnału analogowego z przedziału od 0..255 (256 poziomów = 2^8), natomiast w przypadku 10-bitów 0..1023 (1024 poziomy = 2^10).

Wygląda dość topornie – ale jeśl macie w domu zbyteczną gałkę z kryształów Swarowskiego to proszę śmiało przynieść i uatrakcyjnimy wygląd tego podzespołu elektronicznego 😉 Trzeba pamiętać o sposobie podłączania go do budowanych układów. Widzimy trzy nóżki więc:
Na zajęciach dość szczegółowo omówiłem budowę potencjometru i zasadę jego działania – dzielnik napięć – ale do tego jeszcze obiecuję wrócić. Na razie skupmy się na powyższych informacjach jak potencjometr łączymy w układ. Jako przykład możemy podłączyć „minus” bateryjki AAA do pierwszej nóżki, „plus” do trzeciej „nóżki”, wówczas z pinu numer dwa otrzymamy napięcie od 0..1.5V. Innym przykładem podłączenia jest wykorzystanie Arduino i pinów GND (podłączamy do pinu 1 na potencjometrze) oraz 5V (do pinu 3 na potencjometrze) – wówczas mamy kontrolę potencjometrem nad napięciem 0..5V (pin 2 na potencjometrze).
Pinem #2 z potencjometru możemy zasilać jakiś układ – sprawdzaliśmy to z LED-em wpiętemym pomiędzy piny #1 (GND) i #2(0..3.3V) potencjometru, lub mozemy podłączyć pin #2 do wejścia A0 w Arduino – wówczas odczytamy wartość napięcia ustawionego potencjometrem jako liczbę z przedziału 0..1023 (Arduino UNO ma DAC 10-bitowy).
Konieczne jest sprawdzenie poziomu napięcia 5V w Arduino – może się zdarzyć, że nasza płytka jest uszkodzona lub producent nie trzymał standartów i zamiast 5V mamy 5.1V. To spora różnica. W przypadku uszkodzonych płytek – których wcale nie ma co wyrzucać – napięcie zamiast 5V może być nawet 4.5V co jest już ogormną różnicą! Dlatego konieczne jest sprawdzenie multimetrem wartości napięcia produkowanego przez Arduino z pinu 5V.
void setup(){
Serial.begin(9600);
}
int odczyt;
void loop(){
odczyt = analogRead(A0);
Serial.print("Odczytalem ");
Serial.print(odczyt);
Serial.print(" ---> ");
Serial.print(odczyt*4.9/1024);
Serial.println(" [V] ");
}
Ten prosty program odczytuje sygnał podłączony do pinu A0 w Arduino (możesz wybrac inne wyjścia: A1,A2…A5) i wypisuje jego wartość jako liczbę z przedziału 0..1023 (gdyż Arduino UNO ma przetwornik DAC 10-cio bitowy, czyli 2^10=1024) a także podaje wartość w woltach. Sprawdziłem, że w moim Arduino napięcie z pinu 5V wcale nie wynosiło 5V a 4.9V i dlatego linia #10 zawiera właśnie takie przeliczenie na wolty. Zwróć też uwagę na sposób komunikowania się z ekranem – budowanie napisu w jednej linii i dopiero na koniec użycie funkcji Serial.println().
Posługują się powyższym programem najpierw sprawdzamy odczytywane napięcie z pinu 3.3V Arduino, potem 5V Arduino – porównując wartości wypisywane na ekranie z multimetrem. Potem możemy użyć jakiś baterii a w końcu wykorzystać potencjometr i jego środkowy pin.
PWM to szybkozmienny sygnał cyfrowy (cyfrowy, a więc tylko dwie wartości: 0V oraz 5V). Szybkozmienny oznacza naprawdę szybkie zmiany, 500x na sekundę – czyli co 2ms! Musimy podać jaki ułamek czasu (z przedziału 2ms) będzie napięciem wysokim (5V) a wówczas pozostały czas będzie napięciem 0V. Ten ułamek czasu musimy wyrazić jako liczbę całkowitą z przedziału 0..255 (gdzie 255 to 100%) gdyż w Arduino UNO piny PWM są 8-bitowe (a 2^8=256). Wartość 0..255 nazywa się to wypełnieniem sygnału.
void setup(){
pinMode(3, INPUT);//pin cyfrowy z tyldą = PWM
}
void loop(){
analogWrite(3, 0);
delay(5000);
analogWrite(3, 100);
delay(5000);
analogWrite(3, 200);
delay(5000);
analogWrite(3, 255);
delay(5000);
}
Powyższy program wybiera pin #3 Arduino UNO (zwróć uwagę, że jest on onzaczony „tyldą” na płytce – czylli jest to pin PWM, ale można wybrac inne piny PWM) i steruje jego wypełnieniem. W tym celu używamy funkcji analogWrite(int,int) podając numer pinu którego ma dotyczyć zmiana (koniecznie pin z tyldą!) oraz wartość wypełnienia (koniecznie z przedziału 0..255). Co 5 sekund zmienia jego wartość, którą możemy odczytać na multimetrze – ale uwaga, będzie to tylko wartość średnia! Aby zobaczyć zmiany napięcia w okresach 2ms należało by użyć oscyloskopu.
Wykorzystując informacje z dzisiejszych zajęć uruchomić wirtualne Arduino i zbudować program z potencjometrem, który steruje jasnością LED-a. Musimy więc odczytywać wartości z potencjometru a następnie odpowiednio sterować zasilaniem LED-a. Powodzenia!
(c) KG, 2017