Autorzy: Bartek Butler (2gi rok Fizyki gier komputerowych i robotów)
Zaawansowanie: korpus + montaż + uruchomienie z PC, uruchomienie bezprzewodowo, +moduł JOY
Podstawowym celem projektu jest budowa robota kształtem przypominającego pająka. Robot ma się poruszać na 6-ciu nogach sterowanych serwomechanizmami. Sterowanie odbywa się bezprzewodowo (moduł radiowy 2.4GHz) pilotem własnej konstrukcji (platforma Arduino).
Pierwszy etap to projektowanie konstrukcji – stworzenie kształtu skorupy oraz niezbędnych elementów mechanicznych (zębatki, dźwignie) pasujących pod posiadane mikro serwa (silniki). Należy uwzględnić obciążenia silników i zapewnić odpowiednie zasilanie (zakładamy działanie robota na pokazach rzez około 1h na jednym pakiecie zasilającym).
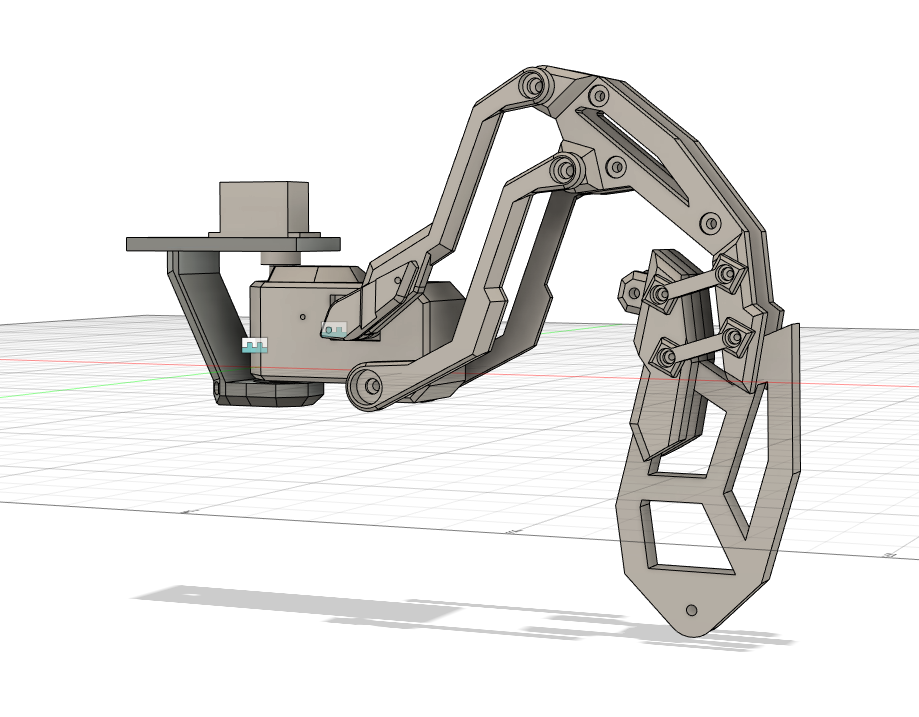
Drugi etap to projektowanie CAD konstrukcji, a następnie wydruk elementów w technologii 3D i składanie całości. Ten etap uwzględnia drobne zmiany w konstrukcji i ponowne wydruki.
Programowanie elektroniki to kolejny etap (platforma Arduino + język C/C++), który posiłkuje się samodzielnie stworzonym programem „warsztatowym” do sterowania poszczególnymi nogami. Oprogramowanie „warsztatowe” działa w Processingu na każdym popularnym systemie operacyjnych (Linux, Windows, iOS) i umożliwia kalibrację nóg robota-pająka.
Ostatni etap to odłączenie robota od komputera i sterowanie za pomocą komunikacji bezprzewodowej (moduły nRF24 na paśmie 2.4GHz). Na początku wykorzystujemy nakładkę (moduł HAT) z joystickiem+przyciskami+radiówką na płytkę Arduino UNO, ale później Autor projektu stworzył swój własny moduł uniwersalnego pilota (ponownie: projektowanie i druk 3D, programowanie).
Podsumowanie: projektowanie 3D, druk 3D, programowanie (C/C++, processing).
Efekty: projektowanie, programowanie.Cel: do samodoskonalenia, do promocji Wydziału Fizyki
Materiały: plexiglass, Z-Ultrat (druk 3D), śrubki i nakrętki, Arduino ProMini
Sponsorzy: Dziekan Wydziału Fizyki, Marcowe Spotkania z Nauką
- 16.09.2021 r. prezentacja projektu podczas wizyty technikum elektrycznego na Wydziale Fizyki
- 28.08.2021 r. prezentacja projektu podczas 1-szych urodzin Epi-Centrum Nauki
- 18.07.2021 r. obrona licencjatu (ocena: bardzo dobry!)
- 01.10.2020 r. uniwersalny pilot do sterowania bezprzewodowego
- 30.07.2020 r. NOGA
- 24.07.2020 r. zmiany
- 10.07.2020 r. – BIEGA!
- 03.07.2020 r. – kroki, bezprzewodowo!
- 26.06.2020 r. – jeden (mały) krok
- 14.05.2020 r. — elektronika zamocowana
- 07.05.2020 r. — heXapod panel w processingu
- 27.04.2020 r. — podskoki!
- 09.04.2020 r. — przedkładnie
- 07.04.2020 r. — pająk już stoi!
- 21.03.2020 r. — 3x Noga plus korpus
- 16.03.2020 r. ZAKUPY! finansowane przez organizatorów Marcowych Spotkań z Nauką
- ??? Drobiazg – ruchoma stopa
- ??? panel (korpus)
- ??? mniejsza noga
- 13.01.2020 r. — Noga (jednak za ciężka…)
- 03.01.2020 r. — Noga! (prawie)
- 25.11.2019 r. — Prace koncepcyjne
Szczegółowy opis
- 18.07.2021 r. OBRONA!
Pan Bartek postanowił wykorzystać tworzony projekt jako główny temat swojej pracy licencjackiej. Praca pt. „Zastosowanie druku 3D i mikrokontrolerów w prototypowaniu i sterowaniu robotem kroczącym” została oceniana bardzo dobrze, a obrona czeka na decyzję Rady Wydziału Fizyki o wyróżnienie.Przykład ten pokazuje, że można pracować „na spokojnie” nad projektem w ramach koła naukowego, a efekty „wpleść” w swoją pracę dyplomową – wówczas ostatni semestr nauki poświęcamy na spisywanie tego, co się udało zrealizować… Pełen komfort pracy 😉
- 30.07.2020 r. – NOGA
To jeden mały krok dla człowieka… Ale ten krok trzeba mieć czym wykonać 😉 Dlatego konstrukcja ciągle się zmienia, aby był to krok wielki dla ludzkości 😉 Na szczęście jest miejsce na zmiany.

Dzięki prętowi nowa noga jest nieporównywalnie stabilniejsza, a dodatkowa sprężynka też ma swoje plusy. - 24.07.2020 r. – zmiany
Zmiany w mocowaniu elementów 3D z serwami – wykorzystanie oryginalnych orczyków z mikro-serw, które mają spasowane ze sobą ząbki – czyli się nie ślizgają. Udało się dociąć orczyki tak, aby zmieściły się w wydrukach – zmiana (1).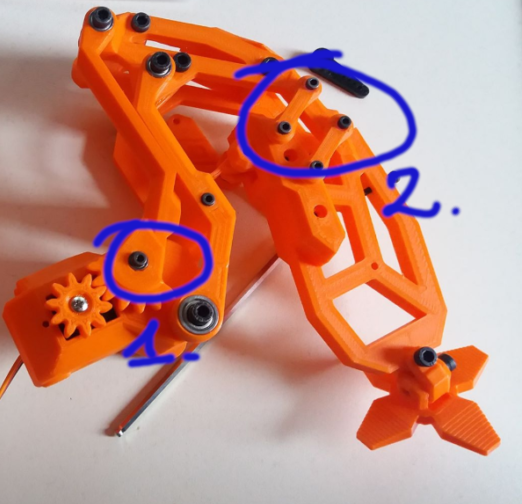
Zmian będzie więcej – niebawem pojawi się nowe rozwiązanie łączące elementy nóg – (niby) zapewniające mniej luzów… Projekt w głowie, niebawem w sofcie, a potem – w druku 3D – chodzi o (2). - 10.07.2020 r. – biega!
Wracamy do kwestii poboru prądu i rozłączania się Arduino Nano. Okazuje się, że problem tkwił w przetwornicy step-down.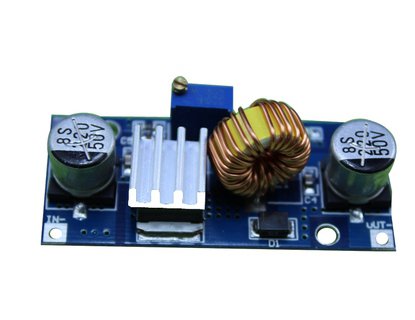
Wybrana przetwornica XL4015E1 wbrew informacjom na stronce sklepu nie zaleca stosowania napięć V_INPUT < 8V. Specyfikacja układu XL4015 wyraźnie o tym mówi, natomiast sklep pisze o działaniu gdy V_INPUT >4V. Jest różnica… heXapod zasilany jest aku Li-Pol Redox 1300mAh
z którego zasilamy 12x mikro serwo działających na zasilaniu 5.5V. Właśnie do tego napięcia potrzebna była przetwornica. Rozładowujący się pakiet tracił trochę napięcia, ale wydawało się, że ciągle mamy bezpieczny margines (+0.3V) powyżej oczekiwanych 5.5V. A tu klops, bo przetwornica działa dobrze, gdy V_INPUT >8V.Powyżej heXapod podczas testowania poboru prądu. Później podłączyliśmy jeszcze amperomierz za przetwornicą i mierzyliśmy prąd pobierany serwa (wejście zasilania serw w module steronika serw PCA9685). Pomierzyliśmy pobór prądu w bezruchu (stan „idle”), w którym pracują wszystkie serwa ustawiając heXapoda w „wyprostowanym” stanie. Dla zasilania 8V mamy 0.147A, dla 16V -> 0.1A, dla 20V -> 0.09A, a dla 24V -> 0.08A (prąd pobierany z zasilacza). Z przetwornicy ciągle wychodzi 5.5V oraz 0.14A do steronika serw. Pomiary te przydadzą się kiedyś (np. do stworzenia charakterystyki sprawności tej przetwornicy).
Aku był na tyle naładowany, że działa wystarczająco dobrze – heXapod nie tylk ochodzi, ale i biega! Jednak „buciki” widoczne na wcześniejszym filmie powodowały zaczepianie o podłoże (wykładzinę w pracowni) i dlatego je zdemontowaliśmy. To ulepszyło chodzenie!
Okazuje się, że wydrukowane sprężynki są liche – i należy je zastąpić nowymi, albo lepiej – metalowymi (może z długopisów?). Aktualnie nie wszystkie nogi pracują (mechanicznie) tak samo i heXapod trochę skręca, bo powłóczy nogą… Ale to się naprawi.
Samo kroczenie będzie jeszcze ulepszane softwarowo (istotne jest wysokość zawieszenia, czyli jak wychylone są serwa heXapoda w trybie „idle”, oraz szybkość „przebierania” nogami). Ale to już niebawem…
- 03.07.2020 r. – kroki, bezprzewodowo!
No i mamy pierwsze próby chodzenia!Konstrukcja sterowana jest z modułu radiówki nRF24 (bez dodatkowych antenek).
Jest problem z zasilaniem, bo jakoś szybko napięcie spadło poniżej bezpiecznego progu i heXapod w kolko się resetował – co wyglądało tak, jakby tańczył albo miał czkawkę 😉
- 26.06.2020 r. — jeden (mały) krok
Przerwa spowodowana sesją, ale prace trwają. Jest już pomysł poruszania dwoma serwami sterującymi jedną nogą. Kawałem kodu też jest, choć dziś jeszcze nie zadziałał. - 14.05.2020 r. — elektronika zamocowana
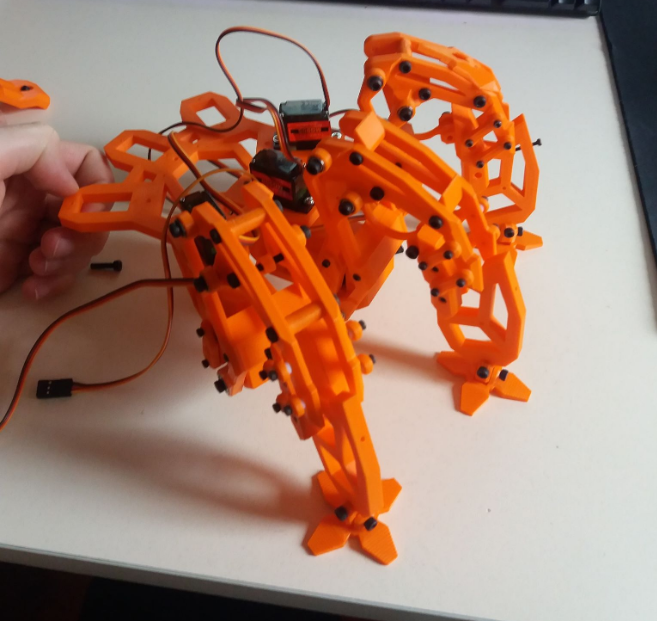
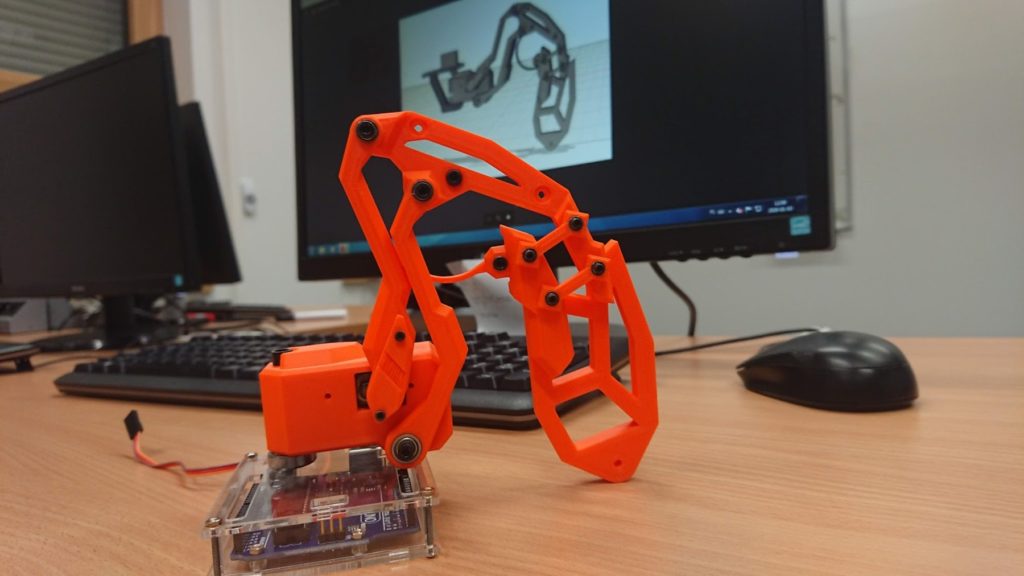
Poniżej widok na heXapoda z zamontowaną (i działającą!) elektroniką. Na razie sterowanie odbywa się przewodowo (choć jest już płytka z radiówką nRF24L). Zasilanie na spodzie.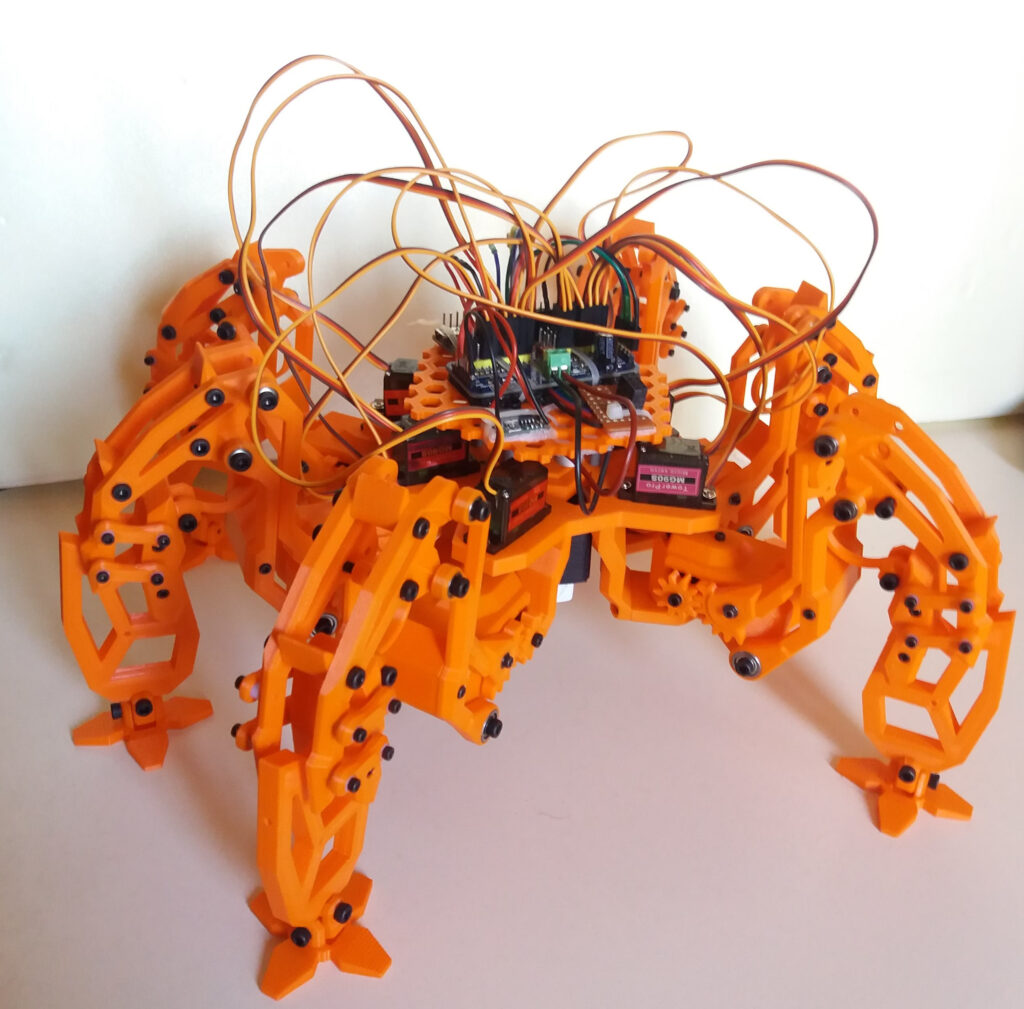
Przy okazji:
processing wysyła przez Serial bajty, które jednak można zgrupować w strukturę – i wysyłać taką „paczkę”. Okazuje się, że w tej strukturze może być także pole całkowite – int. No i działa!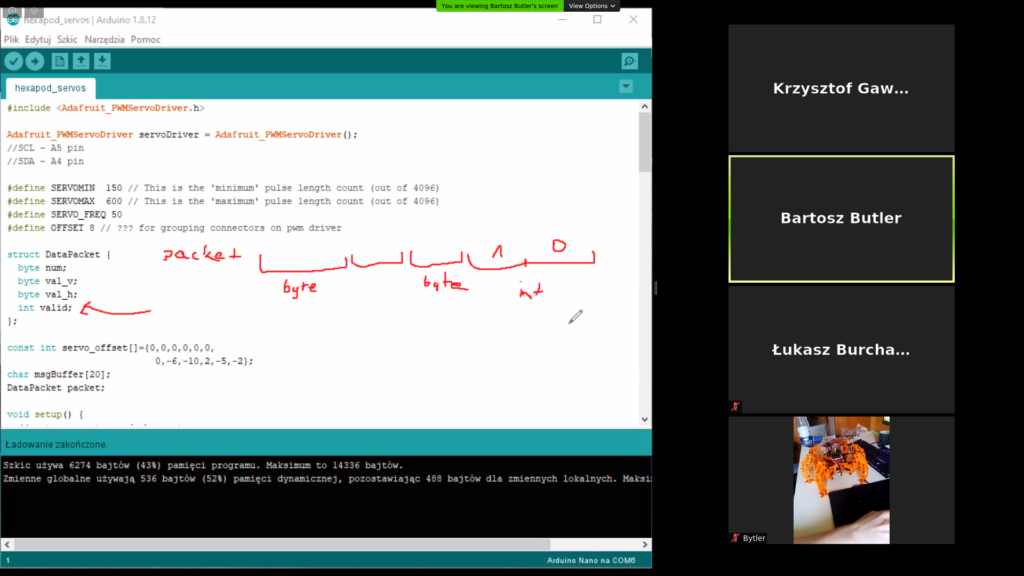
A co z liczbą rzeczywistą? Rozbudowa struktury o float też zadziała? - 07.05.2020 r. — heXapod panel w processingu
Poniżej widzimy panel konstruktorski do sterowania nogami heXapoda stworzony w processingu. W lewej części ekranu myszką wybieramy jedną z 6-ciu nóg (podświetli się na zielonkawy kolor) a następnie zmieniamy jej położenie w prawej części (myszą zmieniając położenie kulki w kwadracie). Ustawione w ten sposób położenie (współrzędne v,h) zostają przeliczone na odpowiednie nastawy serwomechanizmów w wybranej nodze.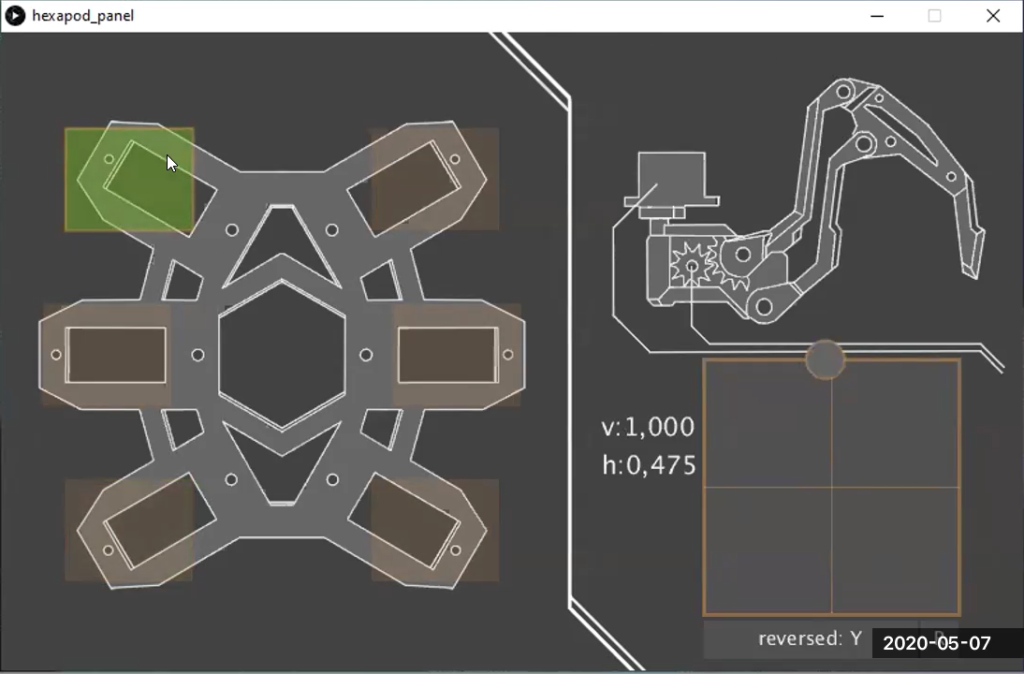 Jak to działa w praktyce?
Jak to działa w praktyce?
- 27.04.2020 r. — podskoki!
Zajęcia zgodne z zaleceniami Ministra – przeprowadzone zdalnie 😉
A co robi już heXapod? Wstaje tak szybko, że można to nazwać skakaniem! Poniżej filmik z prezentacją etapu projektowania i wspomnianego już skoku: - 09.04.2020 r. — przedkładnie!
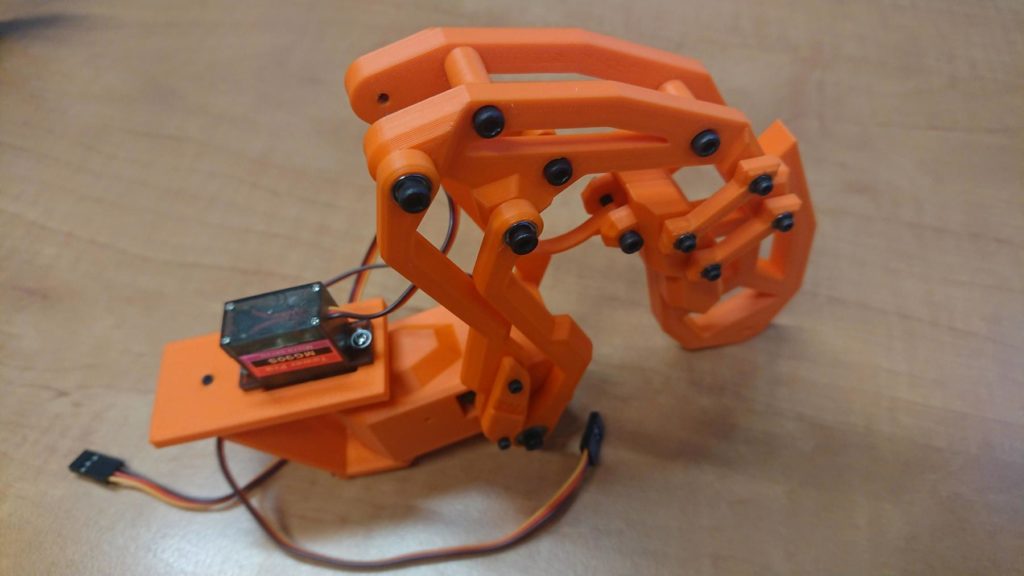
Zacząłem też dzisiaj projektować jakiś system przekładni aby ułatwić trochę serwom. Nóżki podnoszące poruszają się tylko w zakresie 90 stopni i myślałem że warto wykorzystać resztę zakresu ruchu. Program Fusion360 ułatwia ten proces dostarczając odpowiednie narzędzia do konstrukcji zębatek. Prototyp samych przekładni udało mi się wydrukować na mojej drukarce i przy odpowiednich tolerancjach chodzą bardzo dobrze.
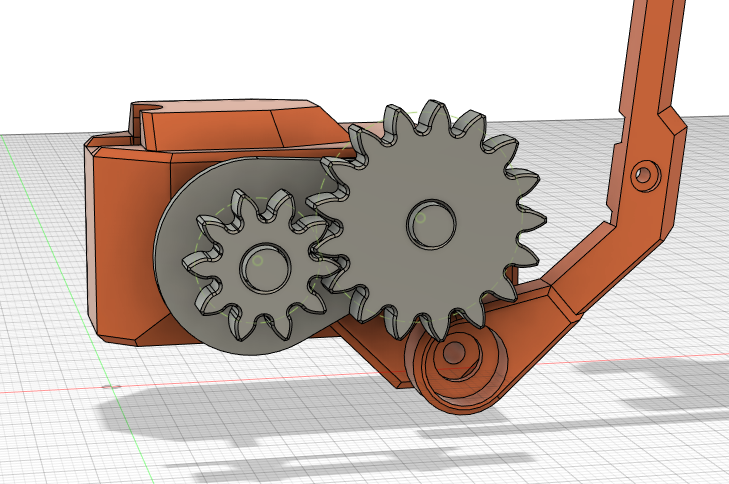


Próbowałem już uruchomić robota na nóżkach bez przekładni. Przekładnie z pewnością się przydadzą – robot będzie mógł poruszać się trochę szybciej ze względu na odciążenie serw. Dodatkowo utrzymanie robota w powietrzu na nóżkach bez przekładni pobiera więcej prądu.
(c) B.B. 2020
- 07.04.2020 r. — pająk już stoi!
Wydruk zakończony! Czas wydruku? 7 godzin na jedną nóżkę + 3 godziny na korpus czyli łącznie około 45 godzin samego drukowania.
Po zmontowaniu wszystkich części zauważyłem, że robot trochę waży i zacząłem powątpiewać czy serwa to uniosą (całe 700 gram bez elektroniki).
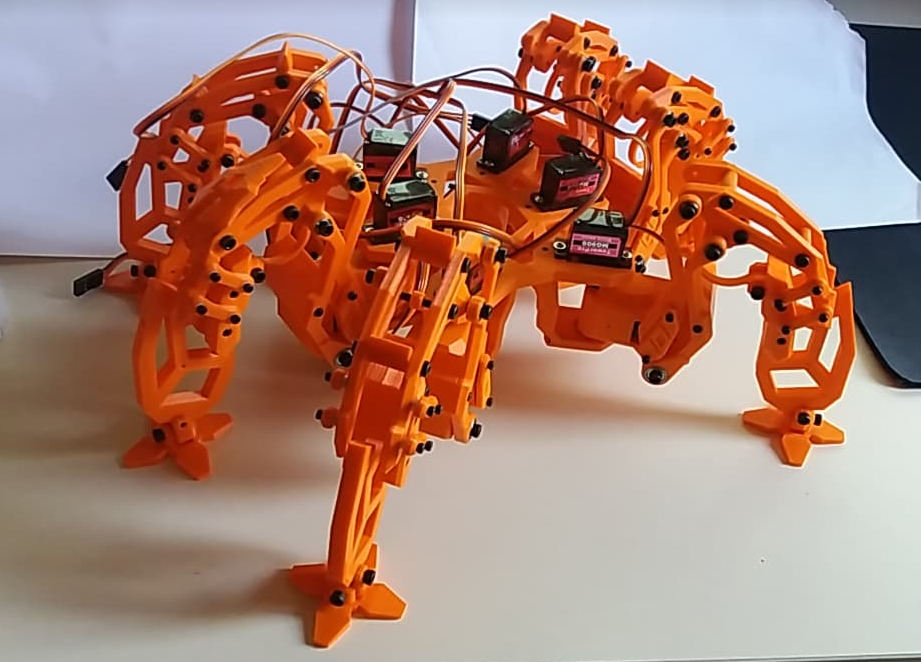
I tu pojawił się mały problem bo podczas chodzenia robot powinien utrzymać swoją masę na 3 nóżkach. Przy dźwigni około 7 cm to jest górny limit tych serw przy wyższym napięciu. Co prawda, robot nie musi się podnosić na tych trzech nóżkach a jedynie utrzymać.
Podłączyłem część nóżek odpowiadających za podnoszenie robota do sterownika.
Korzystając z amperomierza w przetwornicy zauważyłem, że serwo podczas takiego zawieszenia gdy nie może dalej się ruszyć pobiera nawet 600 mA!
(c) B.B. 2020
- 21.03.2020 r. — 3x Noga plus korpus
- 16.03.2020 r. ZAKUPY! finansowane przez organizatorów Marcowych Dni z Nauką
Pan Bartek odebrał przesyłki z Botlanda oraz abc-rc z podzespołami do dalszej pracy nad heXapoda! Teraz czeka go żmudne drukowanie elementów i składanie wszystkiego do całości… Dziękujemy naszym sponsorom: Marcowe Dni z Nauką 2020 (impreza aktualnie odwołana, ale tylko na późniejszy termin – więc prace ciągle trwają).
- Drobiazg – ruchoma stopa
Dobry
- Nowa, mniejsza noga
porównanie jednej obok drugiej (foto?)
waga? w porównaniu do pierwotnego prototypu? brutto (z osprzętem: śrubki, mikroserwa) a może netto (bez osprzętu)?
- 13.01.2020 r. — Noga (jednak za ciężka…)
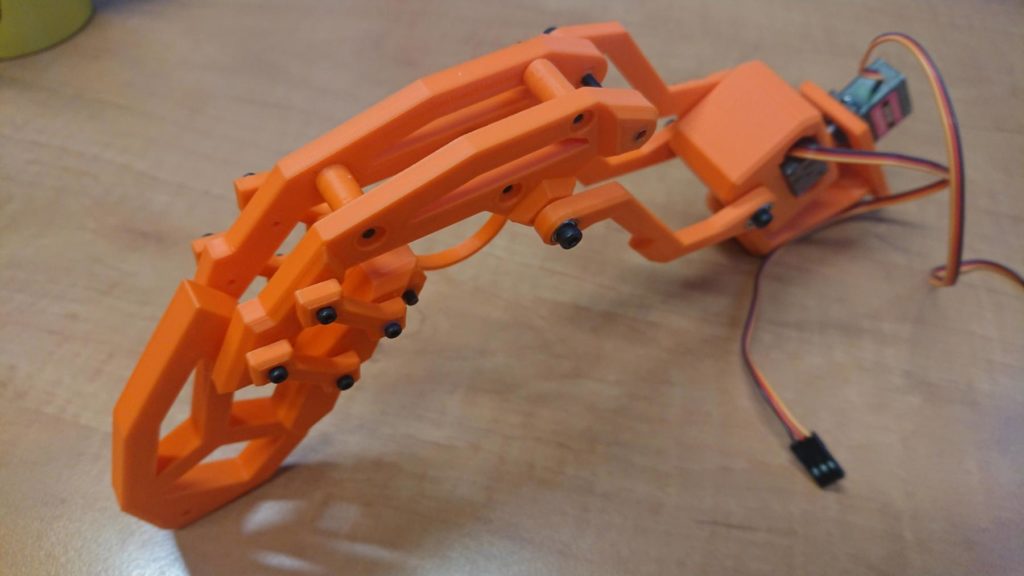
Wszystko okazało się troszkę za ciężkie… Serwo „nie wyrabia” podnosić taką nogę, dlatego albo mocniejsze serwo, albo… lżejsza konstrukcja. Drugie rozwiązanie jest tym bardziej lepsze, bo oznacza mniej filamentu do druku 3D. Zmniejszenie konstrukcji o około 20% spowoduje spadek wagi o około 50% (a tym samym i materiału do druku). Opłaca się to zrobić. Prace w toku…
- 03.01.2020 r. — Noga! (prawie)
Model 3D (dla drukarki): „nie tylko funkcjonalność, ale i wygląd się liczy” jak powiedział Autor, tak i zrobił 😉
Wydruk:
- 25.11.2019 r. — Prace koncepcyjne
O co chodzi? Poniżej inspiracja Autora: