Dzień Ojca „Robota”!
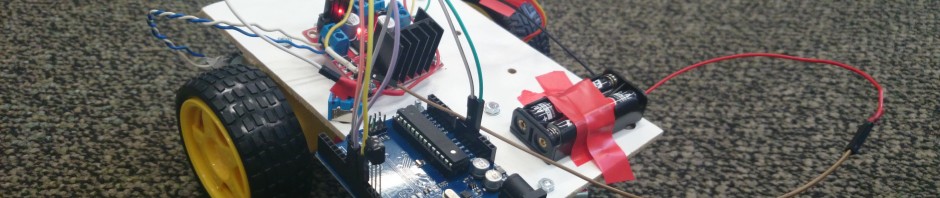
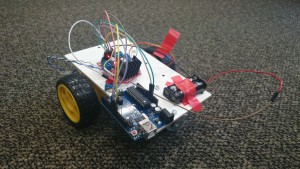
Dziś w ten szczególny dzień (primo: Dzień Ojca, secundo: nasze ostanie spotkanie w Talentach XXIw!) zbudowaliśmy naszego pierwszego mobilnego robota. Uczestnicy kursu zostali więc ojcami swoich mechanicznych zabawek sterowanych pilotem od TV 😉 Gratulacje!

Wykonanie robota polegało najpierw na złożeniu przygotowanych części – hardware w hardcorowym wykonaniu (opis zestawu z fotkami tutaj). Warte jednak zapamiętania jest jedno: nie trzeba kupować (dość) drogich zestawów allegrowych typu platforma robota jezdnego za (bagatela) 40-90 zł (…plus wysyłka) aby rozpocząć przygodę z robotem. Wystarczy płyta pilśniowa (tzw. plecki od szafek), kątownik (trafiłem na taki pasujący do naszych kół!) oraz wkrętarka aby stworzyć pojazd! Do tego warto zaopatrzyć się w garść śrub (w naszym przypadku: fi – czyli średnica – 3mm, długość – 8mm, 12mm oraz 35mm – raptem 3 rodzaje) oraz podkładki z nakrętkami zakupione w Krometcie (uwaga: wpis zawiera lokowanie produktu 😛 a może po prostu dzielę się z Wami fajnymi sklepami?) aby za kwotę mniej niż 5 zł stworzyć platformę, którą możemy dopasować do swoich potrzeb (proszę – porównaj to z ceną podobnych platform, wykonanych z pleksiglasu i dostępnych w serwisach aukcyjnych). To był pierwszy krok.
aby za kwotę mniej niż 5 zł stworzyć platformę, którą możemy dopasować do swoich potrzeb (proszę – porównaj to z ceną podobnych platform, wykonanych z pleksiglasu i dostępnych w serwisach aukcyjnych). To był pierwszy krok.
Drugi krok to połączenie elementów elektroniki sterującej pojazdem. Uczestnicy kursu wykazali się zrozumieniem działania modułu L298N (sterownik silników) oraz TSOP2236 (odbiornika podczerwieni), poznanych wcześniej na naszych zajęciach. Podłączyli wszystko do Arduino UNO i … stworzyli pojazd, który jeździł i obracał się według rozkazów wysyłanych z pilota od TV!
Trzeba przyznać, że to dopiero początek przygody z robotyką. Nasz kurs w ramach Talentów XXIw się kończy, ale (mam nadzieję) Wasza przygoda z informatyką-elektroniką-fizyką dopiero się zaczyna!
Warsztaty „Z fizyką w przyszłość”
Osoby wytrwałe do końca kursu zachęcam do pilnego śledzenia naszego profilu na FB i nasłuchiwaniu o nadchodzącej inicjatywie Wydziały Fizyki UwB „Z fizyką w przyszłość”, gdzie będzie kurs Arduino. Warsztaty rozpoczną się w październiku 2016 r. więc nie przegapcie zapisów, specjalnie dla Was przygotuję grupę zaawansowaną. A jeśli nie chcecie bawić się w mój zestaw z płyty pilśniowej to zapraszam na warsztaty z modelowania i druk 3D – także w cyklu „Z fizyką w przyszłość” (pamiętajcie: październik 2016!).
Wakacyjne projekty?
Jeszcze raz gratuluję wytrwałości na moich zajęciach oraz pracowitości (choć przyznać muszę, że… 1) prac domowych mógłbym otrzymywać więcej, oraz 2) trzeba robić notatki!). Cieszy mnie Wasz entuzjazm, gdy sterowaliście swoim własnym pojazdem! Dziękuję za wspólnie spędzony czas i… zapraszam do chwalenia się własnymi robo-osiągnięciami w wakacje (macie pytanie odnośnie tematu? zakupów? proszę słać do mnie emaile).
K. Gawryluk

 Właściwie niezbędny element, jeśli chcemy stworzyć mobilnego robota na płytce Arduino. W końcu zależy nam, aby „odczepić” się od komputera i portu szeregowego, ALE ciągle chcemy, aby Arduino do nas gadało 😉 Może to być stacja pogody, wyświetlająca na ekraniku aktualną temperaturę/ wilgotność/ prędkość wiatru/ cokolwiek (i nie musimy mieć podłączonego kompa!)…. może to być też pojazd na kółkach, którym sterujemy pilotem od TV – poznanym na naszym poprzednim spotkaniu. Wystarczy teraz połączyć wszystko do kupy (wraz ze sterownikiem silników – modułem L298D) i mamy zabawę! Warto wspomnieć, że sterownik ekraniku HD44780 obsługiwany jest przez bibliotekę LiquidCrystal — powinna być domyślnie zainstalowana w Arduino IDE.
Właściwie niezbędny element, jeśli chcemy stworzyć mobilnego robota na płytce Arduino. W końcu zależy nam, aby „odczepić” się od komputera i portu szeregowego, ALE ciągle chcemy, aby Arduino do nas gadało 😉 Może to być stacja pogody, wyświetlająca na ekraniku aktualną temperaturę/ wilgotność/ prędkość wiatru/ cokolwiek (i nie musimy mieć podłączonego kompa!)…. może to być też pojazd na kółkach, którym sterujemy pilotem od TV – poznanym na naszym poprzednim spotkaniu. Wystarczy teraz połączyć wszystko do kupy (wraz ze sterownikiem silników – modułem L298D) i mamy zabawę! Warto wspomnieć, że sterownik ekraniku HD44780 obsługiwany jest przez bibliotekę LiquidCrystal — powinna być domyślnie zainstalowana w Arduino IDE.


 Inni męczyli się jeszcze ze sterowaniem pojedynczym kołem przez pilot TV – mam nadzieję, że to „męczenie” było całkiem przyjemne i zachęcające do naszego następnego spotkania, za tydzień. Na nim wszyscy stworzą swojego pierwszego mobilnego robota. Zapraszam!
Inni męczyli się jeszcze ze sterowaniem pojedynczym kołem przez pilot TV – mam nadzieję, że to „męczenie” było całkiem przyjemne i zachęcające do naszego następnego spotkania, za tydzień. Na nim wszyscy stworzą swojego pierwszego mobilnego robota. Zapraszam!

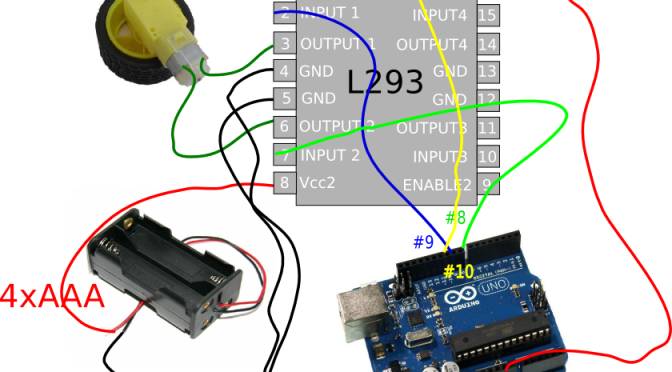
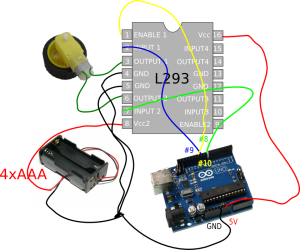
 iś jest naszym nowym kolegą 😉 Prosty w obsłudze a umożliwia: podłączenie zewnętrznego zasilania do silników (np. większego niż 5V z Arduino – jakieś akumulatorki…), sterowaniem dwoma silnikami DC, oraz sterowanie mocą silnika. Programowanie tego układu jest bardzo proste – o ile rozumiemy jak programować cyfrowe wyjścia Arduino, ale poto tyle czasu męczyliśmy się właśnie z LEDami i PWMami, aby taki L293 był bajecznie prosty. Warte zapamiętania jest sekwencja sterująca: dwa jednakowe sygnały oznaczają STOP, sygnały „zero” i „jeden” RUCH w jedną stronę, „jeden” i „zero” RUCH w drugą stronę. Proste. Dodatkowo zapoznaliśmy się z mod
iś jest naszym nowym kolegą 😉 Prosty w obsłudze a umożliwia: podłączenie zewnętrznego zasilania do silników (np. większego niż 5V z Arduino – jakieś akumulatorki…), sterowaniem dwoma silnikami DC, oraz sterowanie mocą silnika. Programowanie tego układu jest bardzo proste – o ile rozumiemy jak programować cyfrowe wyjścia Arduino, ale poto tyle czasu męczyliśmy się właśnie z LEDami i PWMami, aby taki L293 był bajecznie prosty. Warte zapamiętania jest sekwencja sterująca: dwa jednakowe sygnały oznaczają STOP, sygnały „zero” i „jeden” RUCH w jedną stronę, „jeden” i „zero” RUCH w drugą stronę. Proste. Dodatkowo zapoznaliśmy się z mod ułem na bazie układów L293 (tutaj: L298) i pokazałem, jak się z nimi obchodzić (bateryjka + śrubokręt). Tutaj warto pamiętać o drobnych (acz istotnych) szczegółach z not katalogowych tych układów (przede wszystkim: maksymalny prąd pracy!).
ułem na bazie układów L293 (tutaj: L298) i pokazałem, jak się z nimi obchodzić (bateryjka + śrubokręt). Tutaj warto pamiętać o drobnych (acz istotnych) szczegółach z not katalogowych tych układów (przede wszystkim: maksymalny prąd pracy!).