(Wpis ten jest reaktywacją wpisu z 2017 r. Okazało się, że warto podzielić oryginalny wpis na dwie mniejsze części – jedna dotycząca komunikacji I2C właśnie, druga SPI).
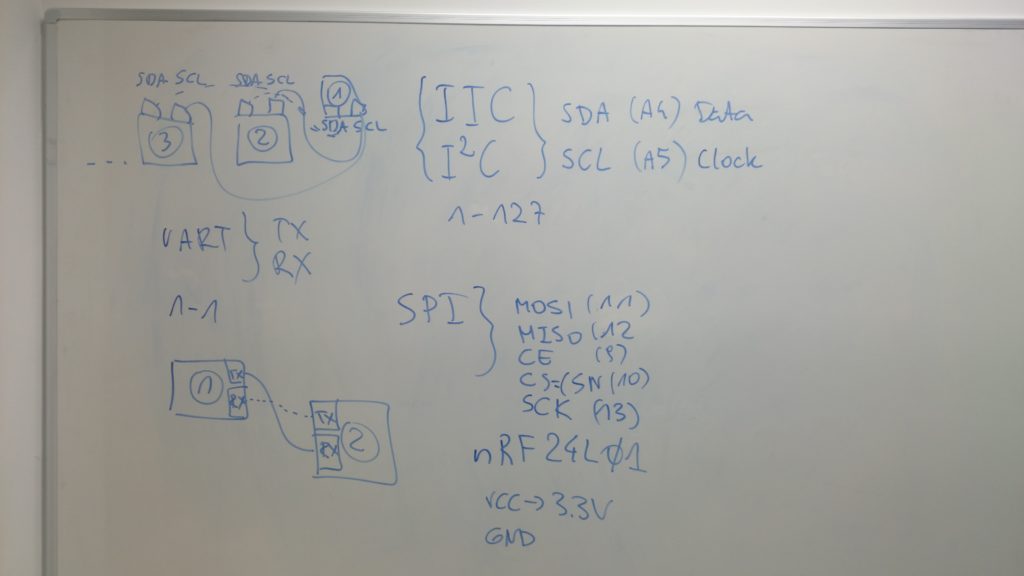
Komunikacja I2C
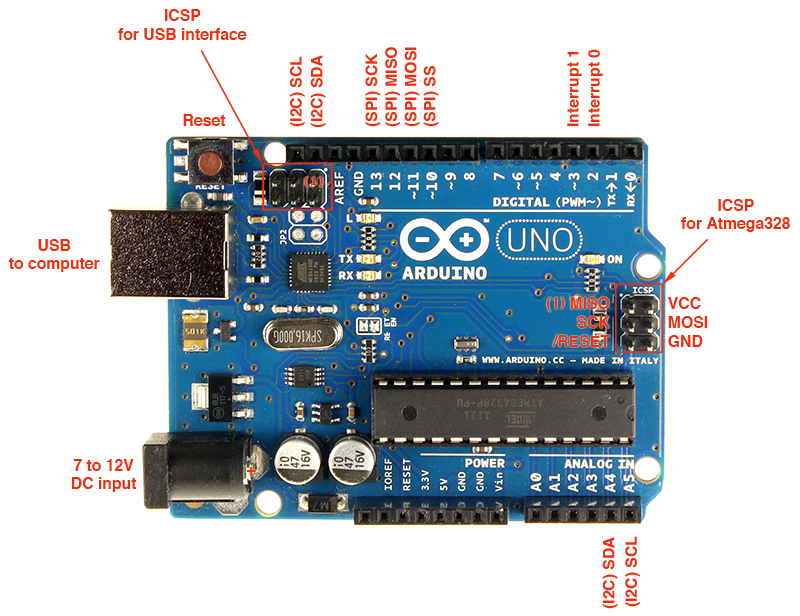
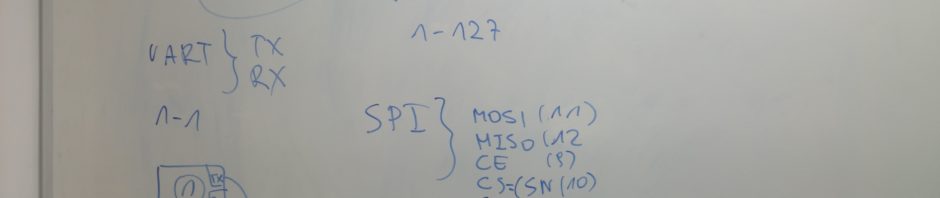
To bardzo popularny interface komunikacyjny, obsługujący za pomocą tylko 2 linii aż 127 urządzeń! tymi pinami są SDA (w Arduino pin A4) oraz SDC (w Arduino pin A5). Oznacza to, że gdy podłączamy coś na I2C „tracimy” piny A4 i A5. Trudno – coś za coś. Zresztą, to nic nowego – podobnie jest z komunikacją UART – Serial.begin(xxx) – „zabiera” nam cyfrowe piny #o (TX) i #1 (RX). Przy czym UART to tylko komunikacja z jednym urządzeniem – a tutaj 2 piny i możliwość obsługi do 127 urządzeń!
HD44780 i LCD 16×2

Jako przykład komunikacji I2C użyliśmy wyświetlacza LCD 16×2 z dodatkowym sterownikiem hd44780. Po co ten sterownik? wszak to bardzo popularny wyświetlacz i można go podłączyć w ten sposób:
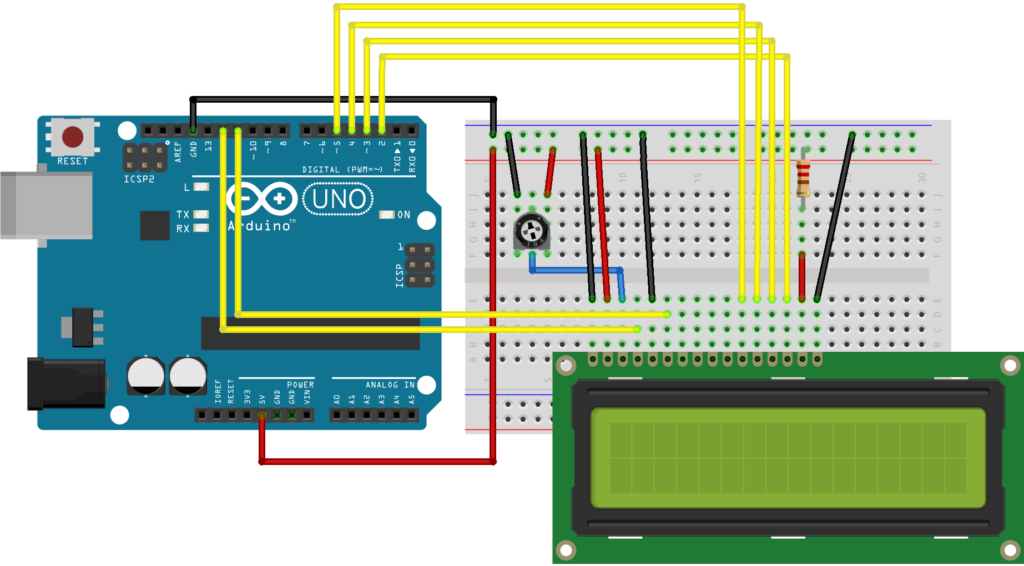 Przypatrzmy się uważnie co my tu widzimy – zwracam uwagę na liczbę pinów potrzebnych do obsługi wyświetlacza przez Arduino. Uważne oko uczestnika sdanaszych spotkań zauważy, że potrzeba aż 6 cyfrowych pinów. To sporo! Wszystko jest OK, gdy robimy proste programy, poznajemy moduły (w tym właśnie taki LCD) więc tych 6 pinów nie robi problemu. Ale my mamy już nasz pojazd i wykorzystanych 6 pinów do jego sterowania (a w planach kolejne rozbudowy). Jak więc poradzić sobie z problemem (powoli) kończących się pinów w Arduino UNO? Zakupić Megasa? A może użyć właśnie sterownika na I2C – wówczas potrzeba jedynie 2 pinów!
Przypatrzmy się uważnie co my tu widzimy – zwracam uwagę na liczbę pinów potrzebnych do obsługi wyświetlacza przez Arduino. Uważne oko uczestnika sdanaszych spotkań zauważy, że potrzeba aż 6 cyfrowych pinów. To sporo! Wszystko jest OK, gdy robimy proste programy, poznajemy moduły (w tym właśnie taki LCD) więc tych 6 pinów nie robi problemu. Ale my mamy już nasz pojazd i wykorzystanych 6 pinów do jego sterowania (a w planach kolejne rozbudowy). Jak więc poradzić sobie z problemem (powoli) kończących się pinów w Arduino UNO? Zakupić Megasa? A może użyć właśnie sterownika na I2C – wówczas potrzeba jedynie 2 pinów!
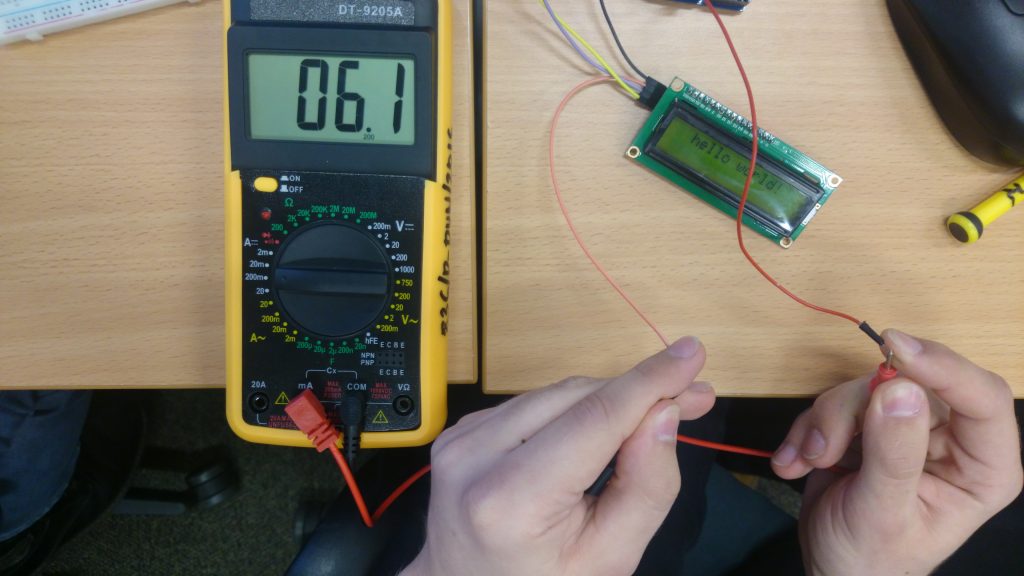
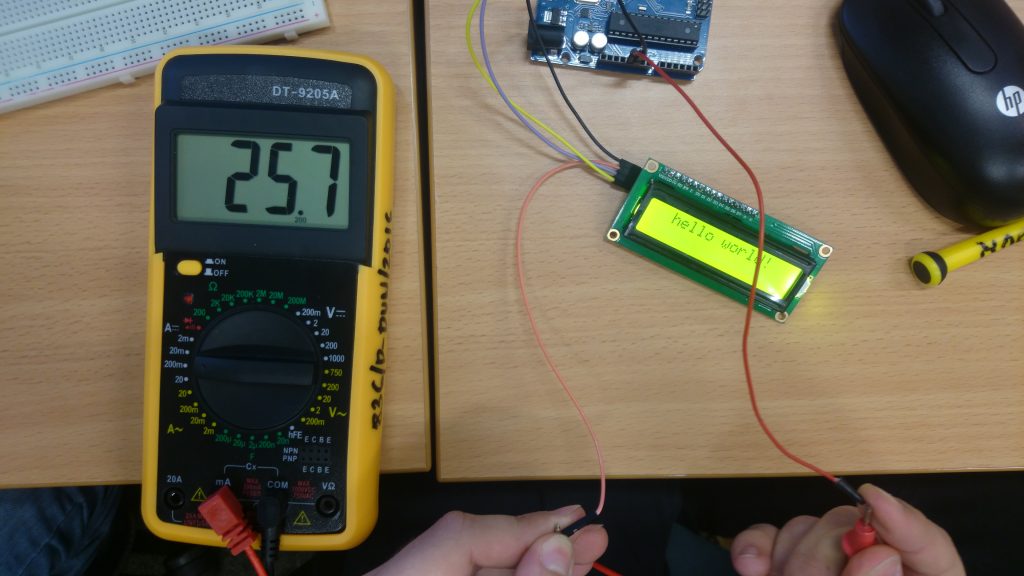
My skorzystaliśmy z wymienimego sterownika PLUS biblioteki LiquidCrystal_I2C autorstwa Franka de Brabander-a. Sporo jest podobnych bibliotek, więc doinstalowywując ją sobie warto zwrócić uwagę na tą użytą przeze mnie, a nie inną. Na szybko poznaliśmy kilka metod nowego obiektu do obsługi wyświetlacza:
include <Wire.h> // standardowa biblioteka Arduino
#include <LiquidCrystal_I2C.h> // dolaczenie pobranej biblioteki I2C dla LCD
LiquidCrystal_I2C lcd(0x27, 16, 2);
//LiquidCrystal_I2C lcd(0x3f, 16, 2);
void setup(){
lcd.init();
lcd.begin(16,2); // Inicjalizacja LCD 2x16
lcd.backlight(); // zalaczenie podwietlenia
lcd.setCursor(0,0); // Ustawienie kursora w pozycji 0,0 (pierwszy wiersz, pierwsza kolumna)
lcd.print("pomidor!");
delay(500);
lcd.setCursor(0,1); //Ustawienie kursora w pozycji 0,0 (drugi wiersz, pierwsza kolumna)
lcd.print("LCD 16x2 I2C -- hd44780");
}
int nico=7;
void loop()
{
lcd.backlight(); // zalaczenie podswietlenia
lcd.setCursor(10,1);
lcd.print(millis()/1000);
delay(1000);
lcd.noBacklight(); // wylaczenie podswietlenia
lcd.setCursor(0,0);
lcd.print(nico);
nico=nico*2;
delay(1000);
}
Warto ją poznać dokładniej, czytając dokumentację.
Adresacja użądzeń I2C
Skoro do tych samych pinów SDA i SDC można podłączyć do 127 urządzeń, to skąd wiadomo, kto co nadaje? Np. jeśli chcemy użyć dwóch LCD-ków, na jedynym wyświetlać pewne informacje a na innym inne to jak kierować napisy na różne urządzenia?
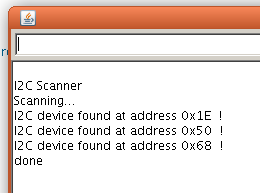
Ważne jest poznanie adresu naszego użądzenia – w tym celu należy wygooglać świetny programik i2c_scanner i wgrać do Arduino z podłączonym wyświetlaczem (zresztą, nie tylko wyświetlaczem – czymkolwiek na I2C).
A jak zmienić adres w omawianym sterowniku hd44780? Bo gdy kupiny sobie dwa takie i chcemy je wykorzystać razem to będzie to niemożliwe – oba będą mieć fabrycznie te same adresy (albo 0x27 – gdy to moduł PCF8574/PCF8574T lub 0x3f – dla modułów PCF8574A). Jest możliwość zmiany adresu zwierając ze sobą (lutując) piny A012 na spodzie modułu:

Kliknij obrazek by dowiedzieć się co i jak.
(c) K.G. 2017, 2019

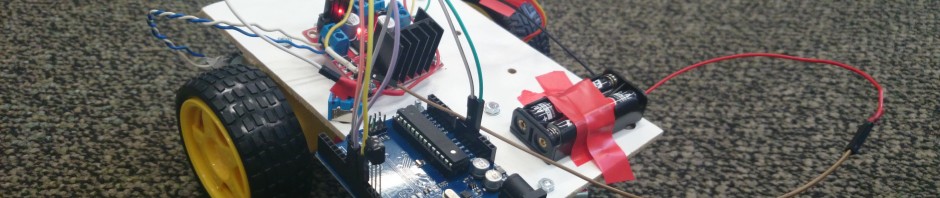



 Właściwie niezbędny element, jeśli chcemy stworzyć mobilnego robota na płytce Arduino. W końcu zależy nam, aby „odczepić” się od komputera i portu szeregowego, ALE ciągle chcemy, aby Arduino do nas gadało 😉 Może to być stacja pogody, wyświetlająca na ekraniku aktualną temperaturę/ wilgotność/ prędkość wiatru/ cokolwiek (i nie musimy mieć podłączonego kompa!)…. może to być też pojazd na kółkach, którym sterujemy pilotem od TV – poznanym na naszym poprzednim spotkaniu. Wystarczy teraz połączyć wszystko do kupy (wraz ze sterownikiem silników – modułem L298D) i mamy zabawę! Warto wspomnieć, że sterownik ekraniku HD44780 obsługiwany jest przez bibliotekę LiquidCrystal — powinna być domyślnie zainstalowana w Arduino IDE.
Właściwie niezbędny element, jeśli chcemy stworzyć mobilnego robota na płytce Arduino. W końcu zależy nam, aby „odczepić” się od komputera i portu szeregowego, ALE ciągle chcemy, aby Arduino do nas gadało 😉 Może to być stacja pogody, wyświetlająca na ekraniku aktualną temperaturę/ wilgotność/ prędkość wiatru/ cokolwiek (i nie musimy mieć podłączonego kompa!)…. może to być też pojazd na kółkach, którym sterujemy pilotem od TV – poznanym na naszym poprzednim spotkaniu. Wystarczy teraz połączyć wszystko do kupy (wraz ze sterownikiem silników – modułem L298D) i mamy zabawę! Warto wspomnieć, że sterownik ekraniku HD44780 obsługiwany jest przez bibliotekę LiquidCrystal — powinna być domyślnie zainstalowana w Arduino IDE.


 Inni męczyli się jeszcze ze sterowaniem pojedynczym kołem przez pilot TV – mam nadzieję, że to „męczenie” było całkiem przyjemne i zachęcające do naszego następnego spotkania, za tydzień. Na nim wszyscy stworzą swojego pierwszego mobilnego robota. Zapraszam!
Inni męczyli się jeszcze ze sterowaniem pojedynczym kołem przez pilot TV – mam nadzieję, że to „męczenie” było całkiem przyjemne i zachęcające do naszego następnego spotkania, za tydzień. Na nim wszyscy stworzą swojego pierwszego mobilnego robota. Zapraszam!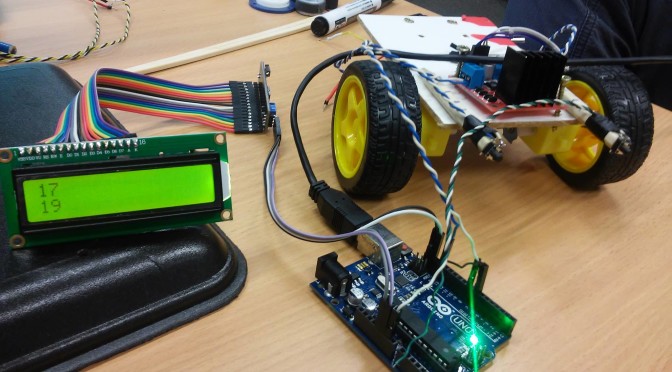
 zym Kole pojawiła się kwestia komunikacji innej niż UART. Podłączyliśmy więc ekranik LCD za pomocą konwertera I2C. Dzięki temu zaoszczędzamy piny mikrokontrolera, które możemy zagospodarować inaczej.
zym Kole pojawiła się kwestia komunikacji innej niż UART. Podłączyliśmy więc ekranik LCD za pomocą konwertera I2C. Dzięki temu zaoszczędzamy piny mikrokontrolera, które możemy zagospodarować inaczej.