http://shieldlist.org/ — strona z wieloma, wieloma shieldami do Arduino.

http://shieldlist.org/ — strona z wieloma, wieloma shieldami do Arduino.
 Ciągle jest kilka kwestii do zrobienia:
Ciągle jest kilka kwestii do zrobienia:
(c) K.G.

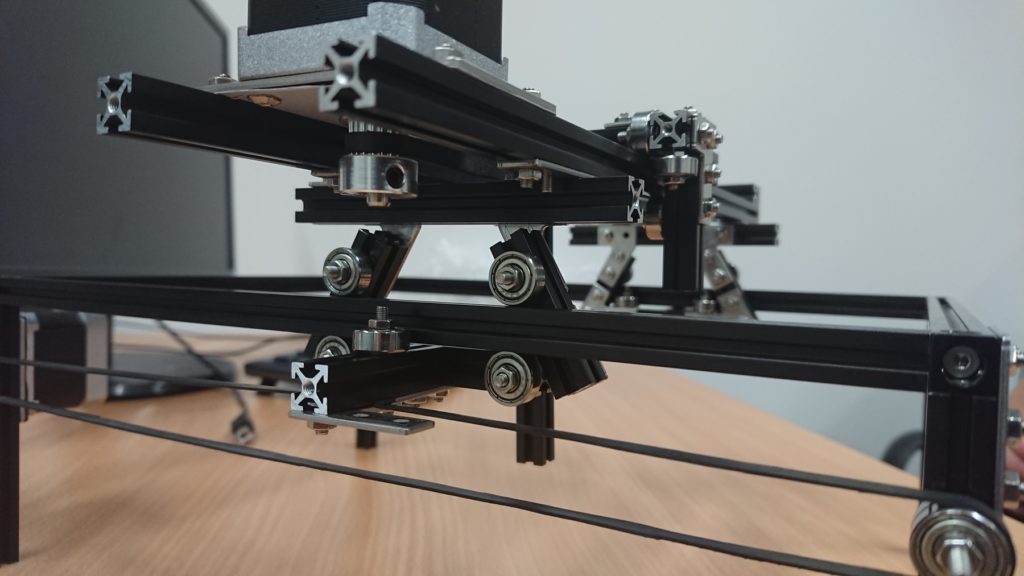
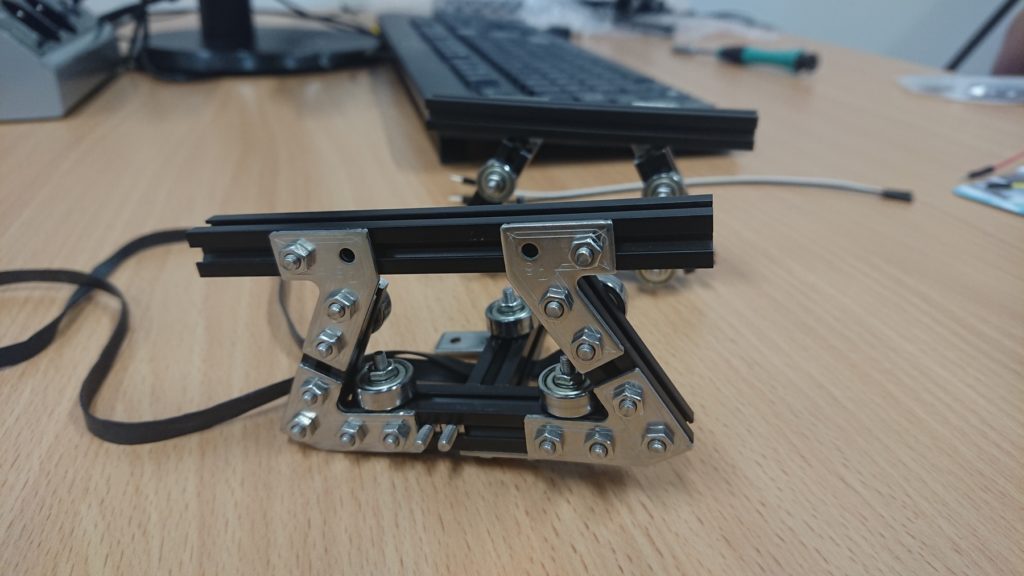
 I najważniejsze – wózki:
I najważniejsze – wózki:
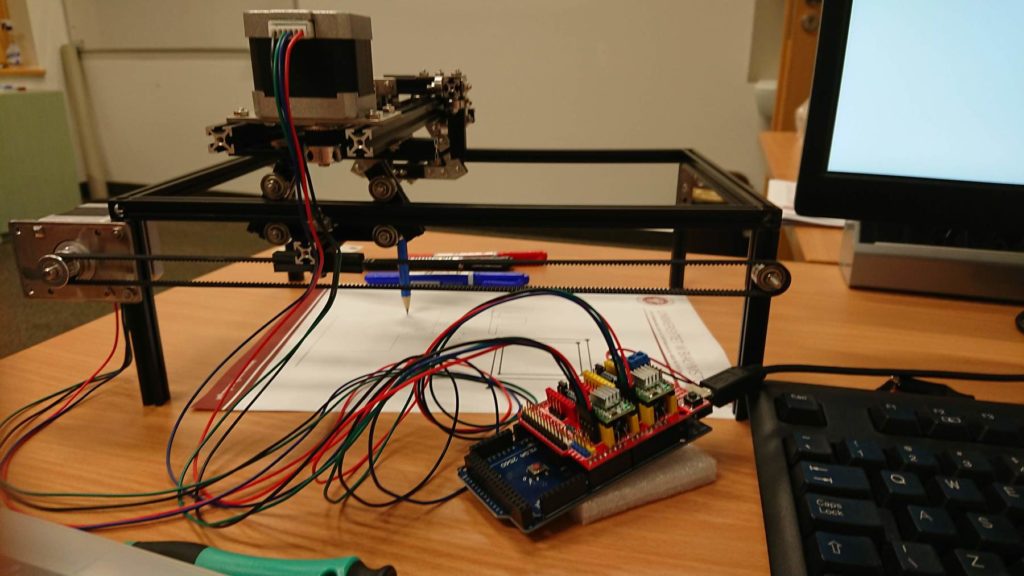
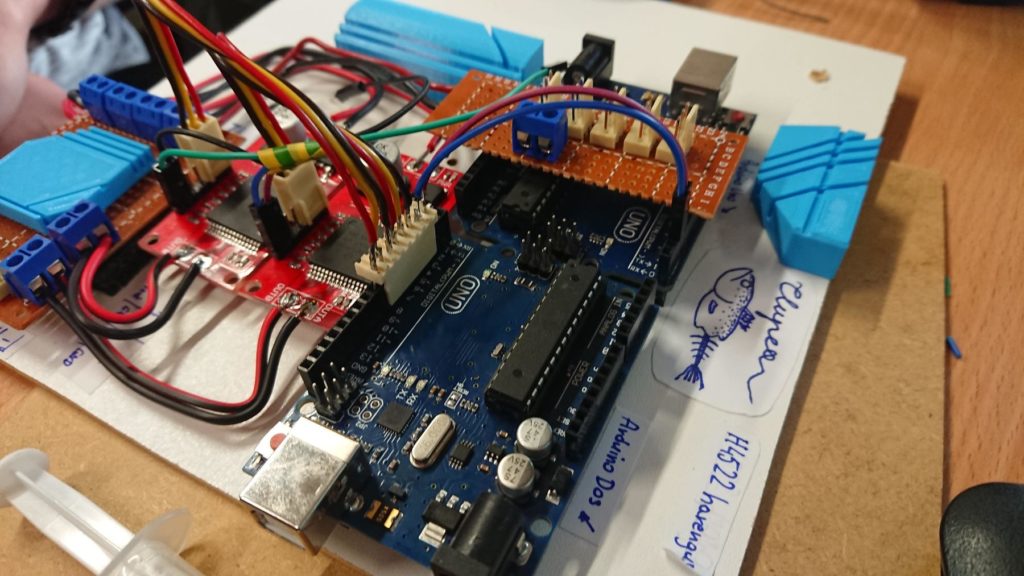
 Chwilowo paski to zwykła dętka rowerowa (odpowiednie paski w drodze). Sterowanie shieldem do silników krokowych i maszyn CNC:
Chwilowo paski to zwykła dętka rowerowa (odpowiednie paski w drodze). Sterowanie shieldem do silników krokowych i maszyn CNC:
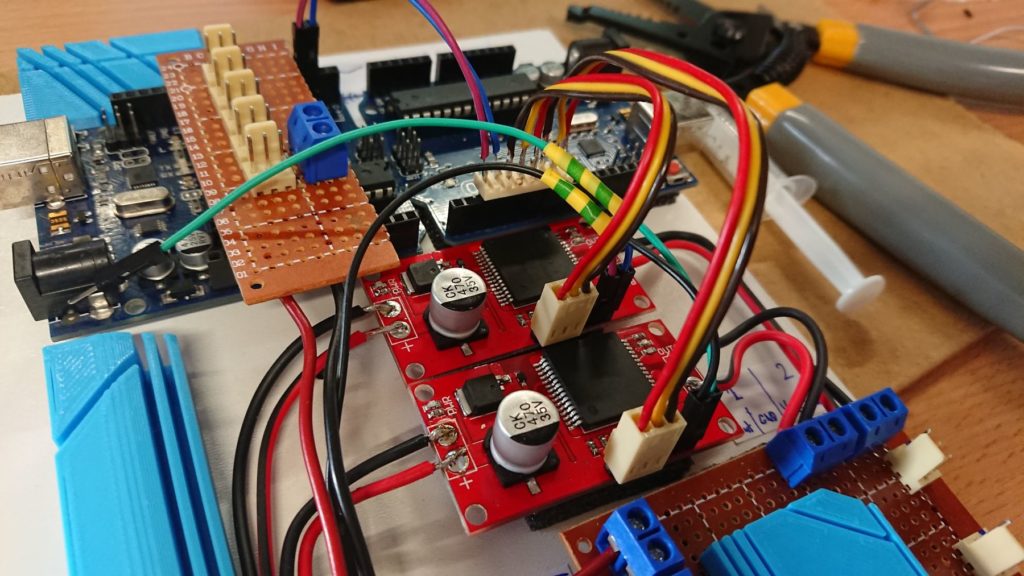
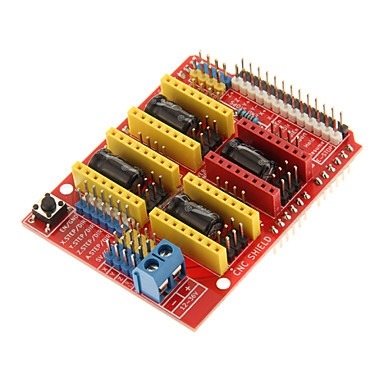 Taki shield to fajna sprawa – oszczędza plątaniny przewodów. Jego programowanie jest bajecznie proste. Używamy modułów A4988 sterowników silników:
Taki shield to fajna sprawa – oszczędza plątaniny przewodów. Jego programowanie jest bajecznie proste. Używamy modułów A4988 sterowników silników:
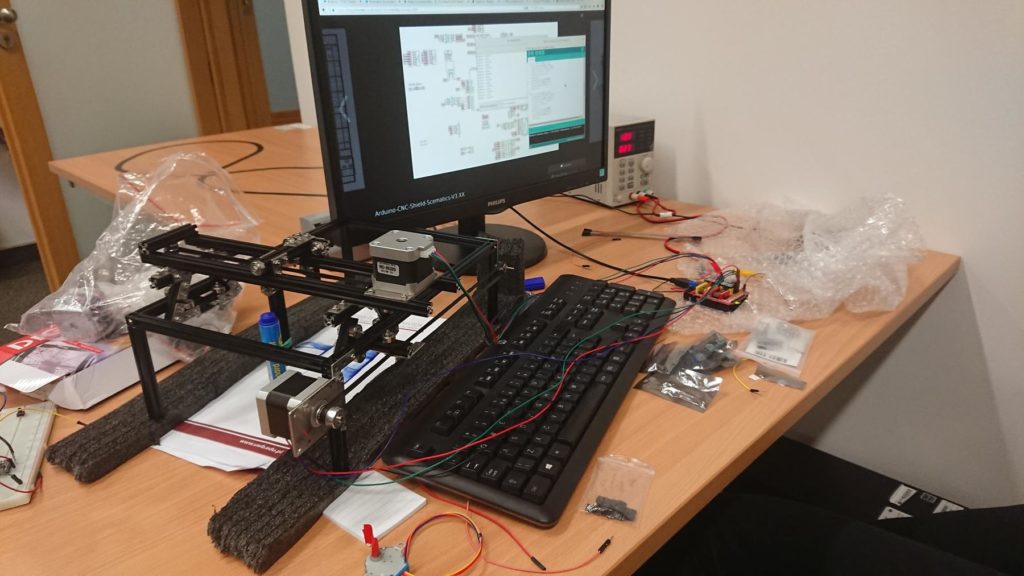
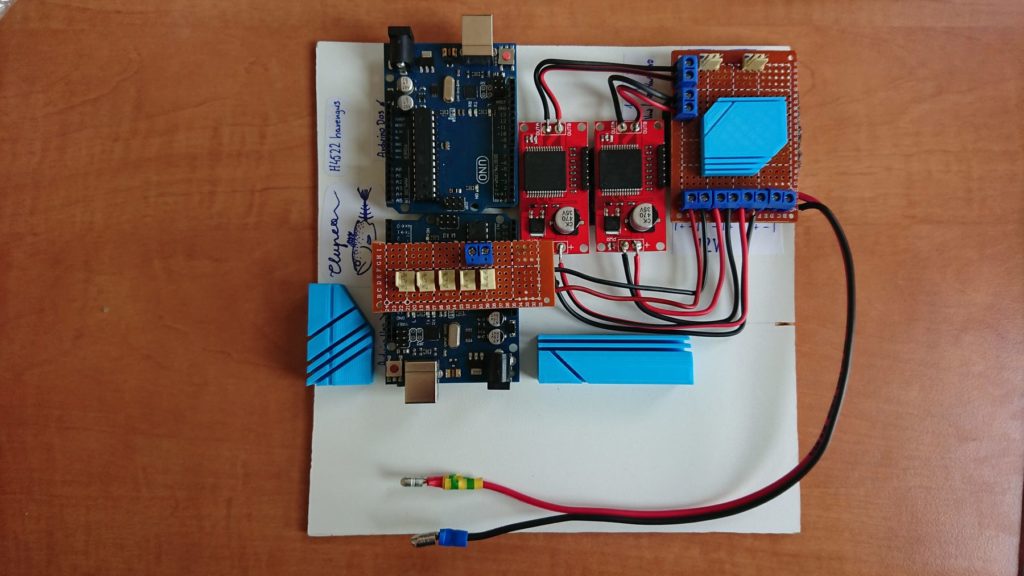
 Wszystko złożone i gotowe do pracy wyglądało tak:
Wszystko złożone i gotowe do pracy wyglądało tak:
 A jak to działa?
Na filmie powyżej dodatkowy (tymczasowy) element – gąbki, to wyciszenie (cała konstrukcja lekko drga, a metalowe śrubki lekko dzwonią). Mamy pomysł co z robić z tym „fantem” – będzie i skuteczne, i zabawne 😉 W strylu Pana Bartka – wydrukuje się w 3D odpowiednie podkładki. Niebawem się okaże.
A teraz dwa silniki w akcji:
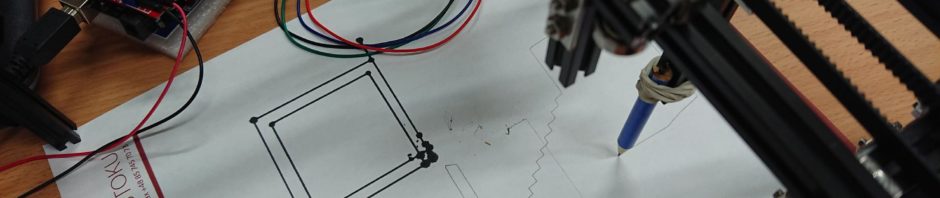
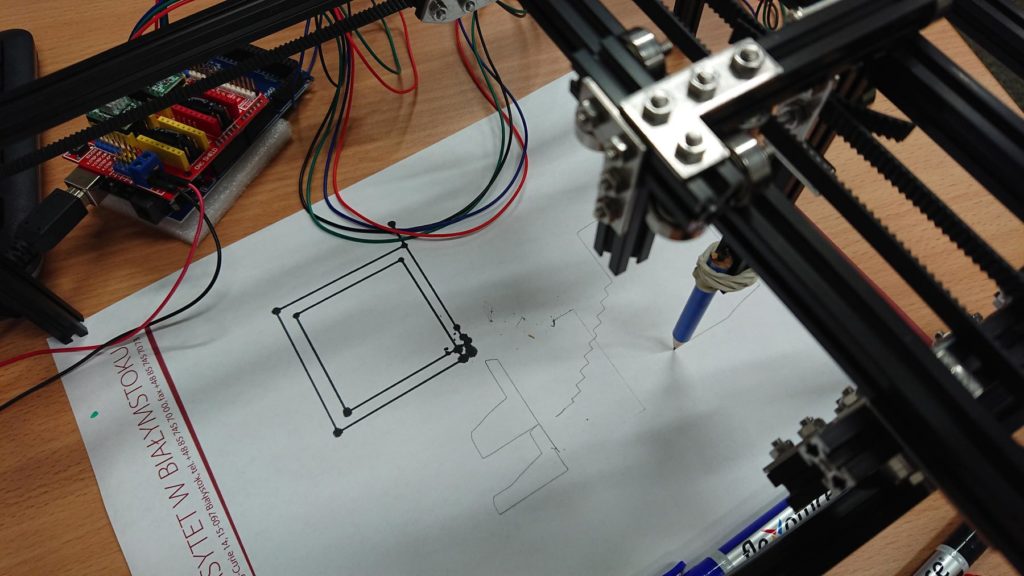
Nie mogliśmy się oprzeć pokusie „zainstalowania” precyzyjnego pisaka 😉 i wykonania pierwszego „precyzyjnego” rysunku:
A jak to działa?
Na filmie powyżej dodatkowy (tymczasowy) element – gąbki, to wyciszenie (cała konstrukcja lekko drga, a metalowe śrubki lekko dzwonią). Mamy pomysł co z robić z tym „fantem” – będzie i skuteczne, i zabawne 😉 W strylu Pana Bartka – wydrukuje się w 3D odpowiednie podkładki. Niebawem się okaże.
A teraz dwa silniki w akcji:
Nie mogliśmy się oprzeć pokusie „zainstalowania” precyzyjnego pisaka 😉 i wykonania pierwszego „precyzyjnego” rysunku:
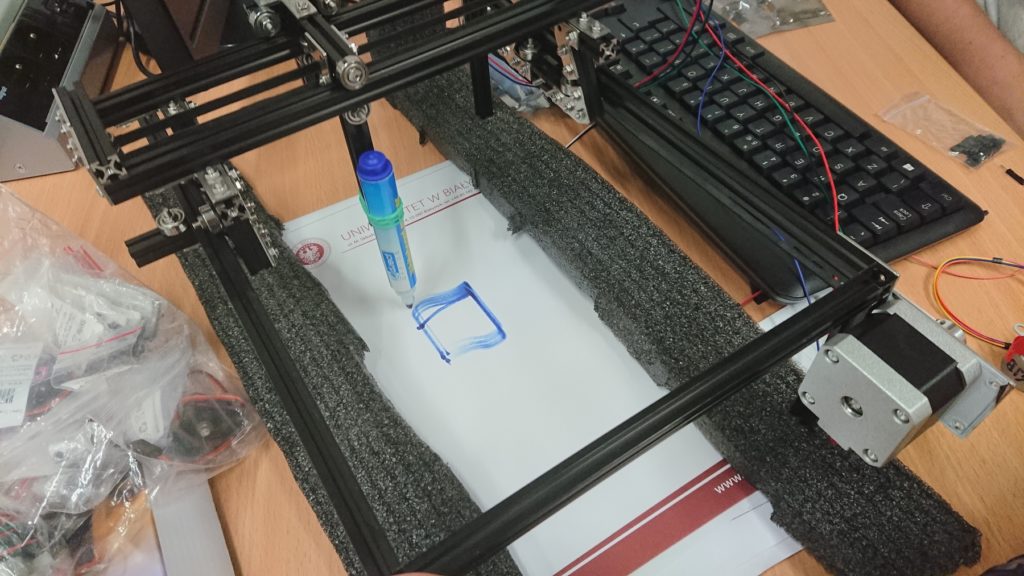 Na uwagę zasługują gradienty koloru i efektowne falki. Jak się takie rzeczy programuje – chwilowo pozostawiamy w tajemnicy 😀 Filmik
Poniżej najważniejsi gracze z prezentowanej maszyny: wózki konstrukcji Pana Bartka – gratuluję pomysłowości!
Na uwagę zasługują gradienty koloru i efektowne falki. Jak się takie rzeczy programuje – chwilowo pozostawiamy w tajemnicy 😀 Filmik
Poniżej najważniejsi gracze z prezentowanej maszyny: wózki konstrukcji Pana Bartka – gratuluję pomysłowości!

 Widać, że prace idą w (bardzo) dobrym kierunku. Niebawem kolejne etapy produkcji – wszystko aktualizowane na oddzielnej stronie projektu.
Widać, że prace idą w (bardzo) dobrym kierunku. Niebawem kolejne etapy produkcji – wszystko aktualizowane na oddzielnej stronie projektu.
(c) K.G.

Chaos wewnątrz Maskotki zostaje ujarzmiony… ciągle sporo pracy… ale kto nie strajkuje, ten coś robi 😉 Wersja poweekendowa Pana Bartka:
A tutaj wersja z dzisiejszych zajęć:
Czego nie widać to miejsca mocowania wewnątrz obudowy Maskotki, ale nie ma sprawy. Jeszcze tylko konektory do silników i jest porządek! Kto dopatruje się logo śledzia? 😉
Dodatkowo, mamy nową wersję dmuchawy (w świecie WIRTUALNYM, projekt 3D – Pan Bartek):
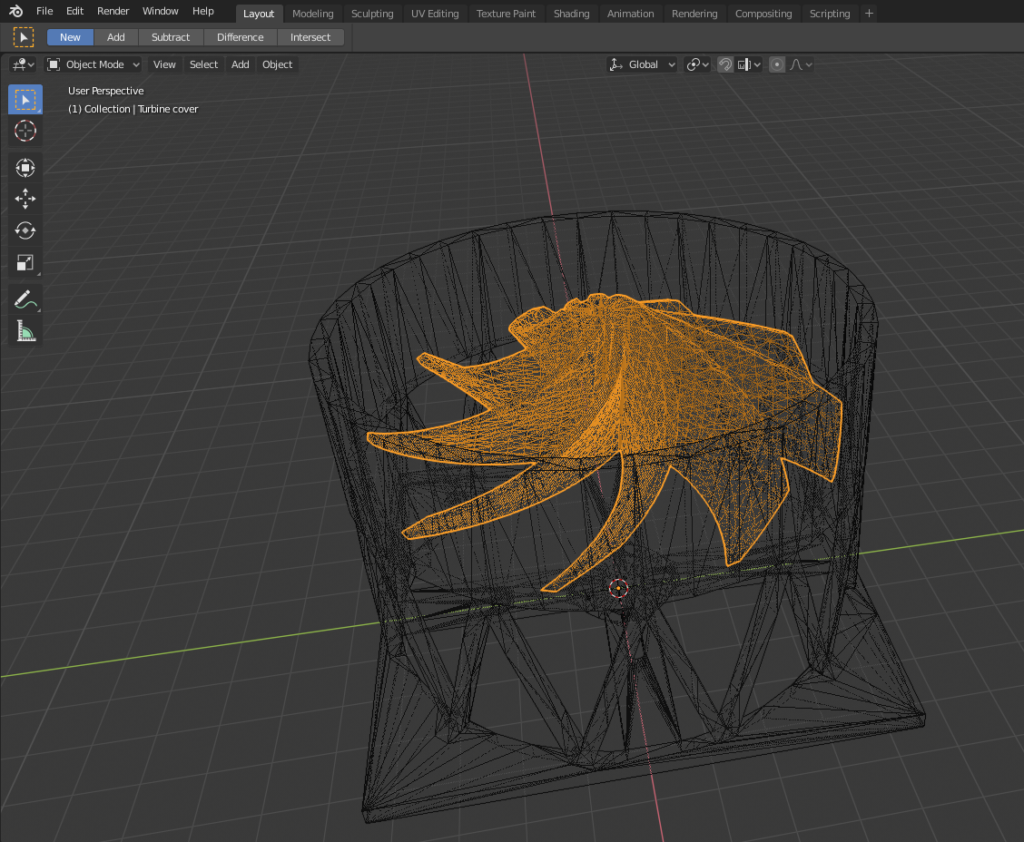
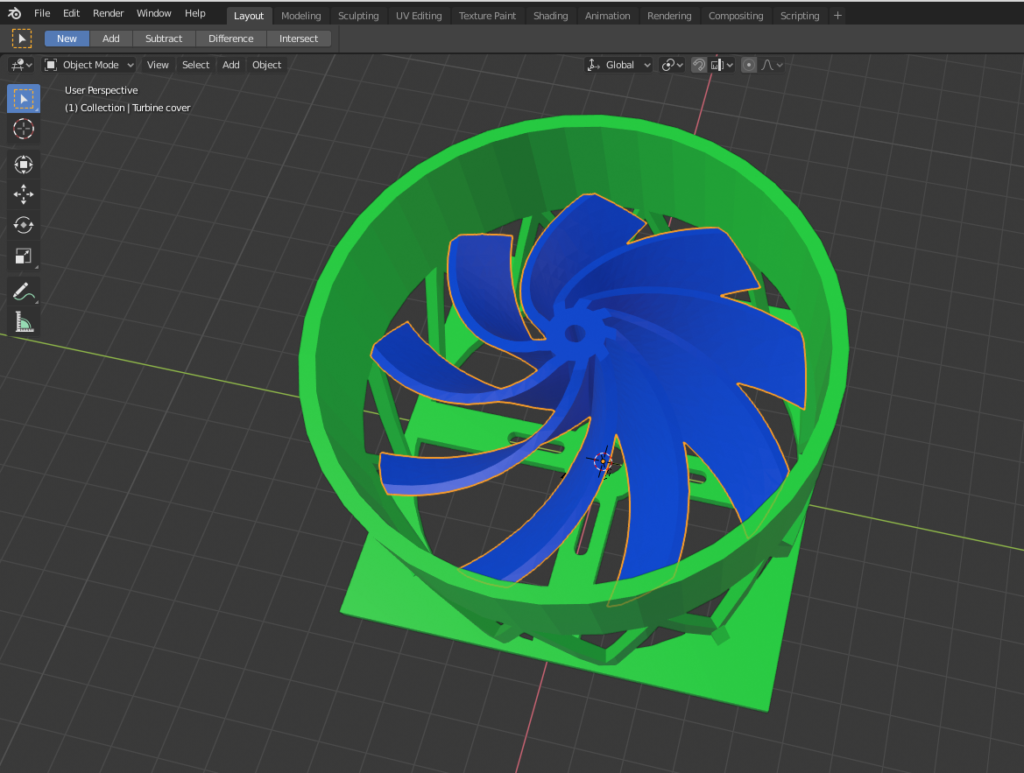
No i w REALU (wydruk 3D – Pan Bartek, drukarka Ender 3):
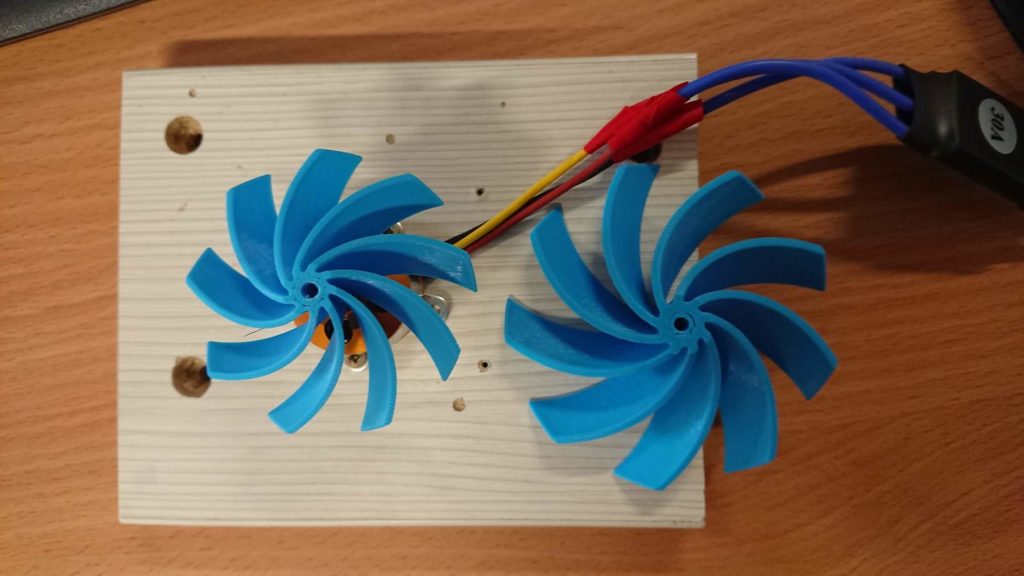
Turbina jest (jak widać, po prawo) znacznie większa od tej z zeszłego tygodnia i… znacznie „dmuchawniejsza” 😀 Co więcej, nie trzeba już nawierać otworu fi-3.17mm, bo projekt 3D już to uwzględnił. Jednak… testy na 15% mocy (12V, 3A) pokazały, że jest OK tylko do pewenego momentu… Przy dalszym zwiększaniu mocy (doszedłem do 2A i 50% mocy) wiatraczek stracił przyczepność z wałem 😛 Trzeba było ponownie kombinować, jak go umocować, aby się nie oderwał. Znowu poszły cieniutkie nitki z przewodów (wielo-nitkowych), które jednak… zdały egzamin częściowo. Po chwili kręcenia na maksa (wow! po raz pierwszy 100% mocy!) nitki się przepaliły i silnik kręcił się sobie, a wiatraczek sobie. Lipa. Trzeba coś kombinować. Jak widać jest zabawa 😉
(c) K.G. 2019
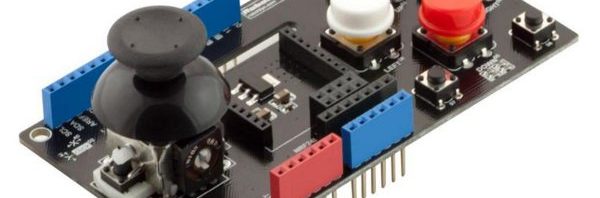
Dziś nowy gadget:
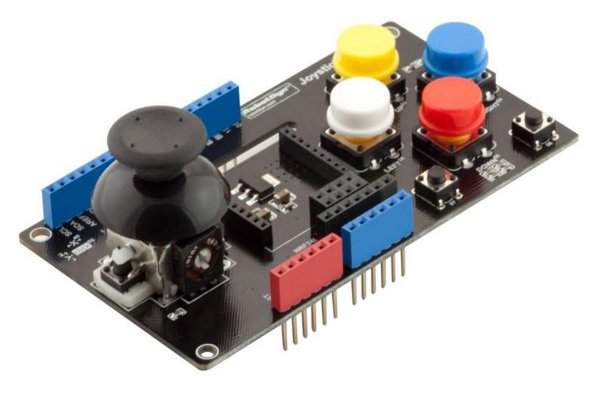
czyli joy-shield. Co to ten „shield”? To rozszerzenie, z różnymi modułami, które nadrukowane są na płytkę PCB i nie wymagają płytki stykowej i masy przewodów. Taką płytkę „wtyka” się w piny Arduino, tworząc „kanapkę”. Ten shield ma „gierkowe” przeznaczenie – choć my go wykorzystamy do sterowania pojazdem, ale są też inne (do internetu przez kabel eRJotkę, przez sieć bezprzewodową, z kartą SD do zapisu danych, z obsługą silników i inne). Warto łapać okazję na allegro lub podobnych, bo ja swój shield kupiłem za 25 zł! A co on ma w sobie?
Oczywiście moduł (=shield) przeznaczony do współpracy z płytkami Arduino UNO, MEGA, LEONARDO itp. Warto zwrócić uwagę na jakość wykonania – mój ma fajne opisy w łatwo dostępnych miejscach.
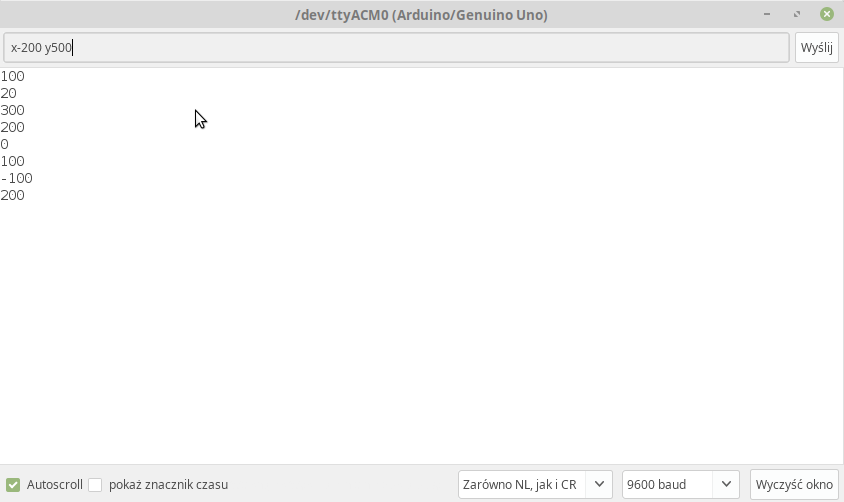
Okazuje się banalnie prosta. Czytamy położenie dwóch osi (x i y) – czyli porty analogowe A0 i A1 (cóż, ten shield je sobie „rezerwuje” i nie mamy ich możliwosci wykorzystywania). Wszystko ładnie opisane na płytce. Podobnie z przyciskami.
void setup() {
Serial.begin(9600);
}
int x,y;
void loop() {
x=analogRead(A0);
y=analogRead(A1);
Serial.print(x);
Serial.print(" ");
Serial.print(y);
if (digitalRead(5)==1)
Serial.print(" niebieski");
if (digitalRead(4)==1)
Serial.print(" bialy");
if (digitalRead(3)==1)
Serial.print(" czerwony");
//i tak dalej
Serial.println();
delay(100);
}
Zwracam uwagę na „sprytne” granie metodą print oraz println wraz ze spacjami tak, aby wszystko mieściło się w jednej linii i nie było „pozlepiane”.
A odczytywanie przycisków – skoro używam funkcji digitalRead(pin) to dlaczego nie ma wcześniej pinMode(pin, INPUT)? Otóż domyślnie piny ustawione są w trybie INPUT, dlatego właśnie nic nie dopisywałem. Jesto to warte zapamiętania, co powino nie być trudne – w końcu dla wejść analogowych nie ustawialiśmy w tryb INPUT, czyli z wejściami cyfrowymi jest tak samo.
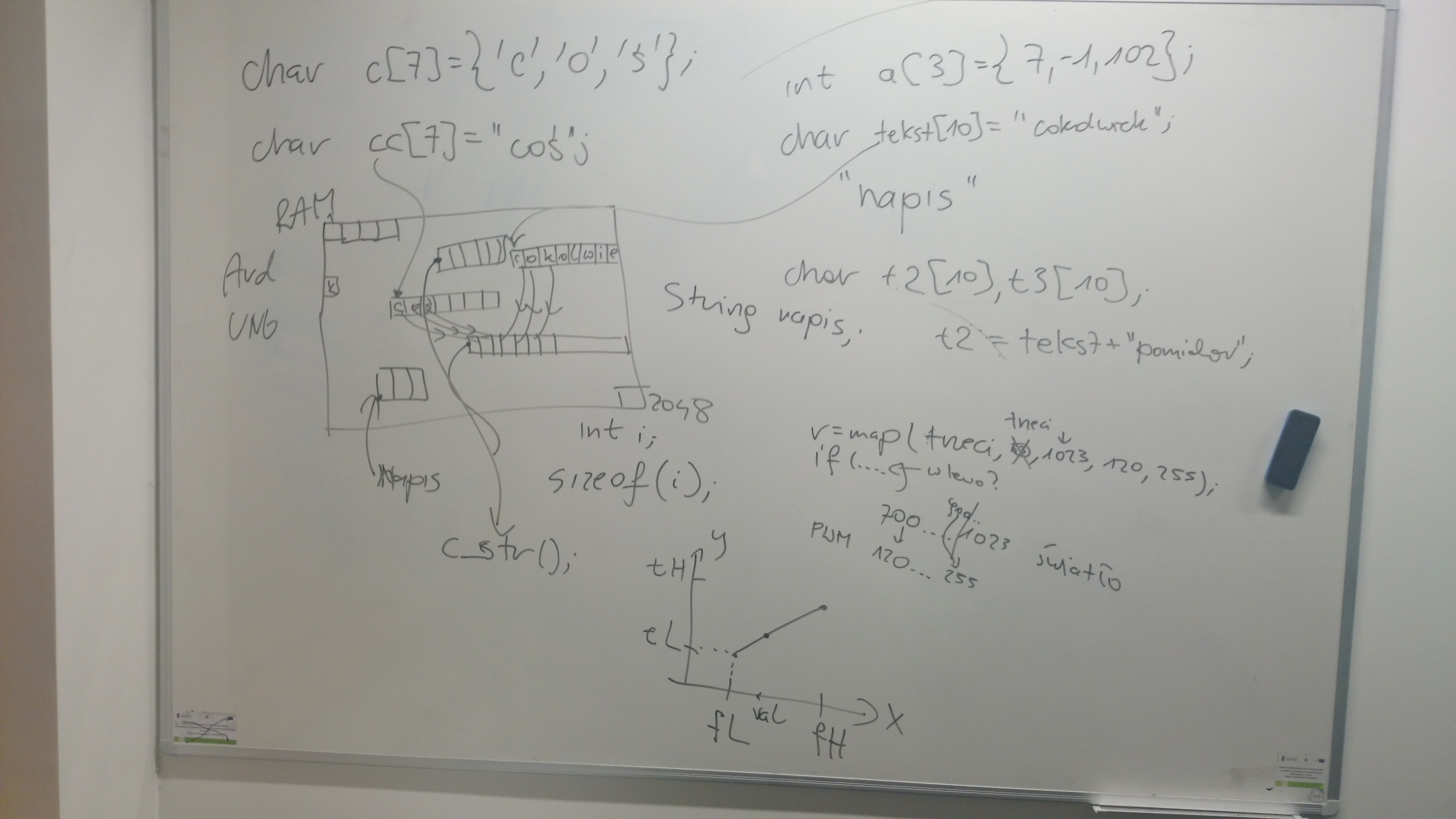
Temat rzeka… trzeba zacząć, czym są tablice w C. Zauwazyłem, że godnym polecenia jest artykuł na oficjalnej stronie Arduino. Ja dołączam „zrzut ekranu” z zajęć.
Jak zmienić nasz poprzedni kod, aby działał na napisach?
void setup() {
Serial.begin(9600);
}
String napis;
void loop() {
napis=String(analogRead(A0));
napis = napis + " ";
napis = napis + String(analogRead(A1));
if (digitalRead(5)==1)
napis = napis + String(" niebieski");
if (digitalRead(4)==1)
napis += String(" bialy");
if (digitalRead(3)==1)
napis += String(" czerwony");
//i tak dalej
Serial.println(napis);
delay(100);
}
Oczywiście nic tutaj nie zyskaliśmy, a nawet gorzej – obsługa klasy String w Arduino jest zasobożerna – czyli mocno powiększa nasz kod, ale tym się jeszcze nie przejmujemy. Na uwagę zasługuje łatwe dodawanie (łączenie) ze sobą napisów – realizuje to zwykły operator + (plus).
Łączy my poznane dziś rzeczy z poprzednimi zajęciami i nadajemy to, co robimy na naszym kontrolerze. Właśnie dlatego użyliśmy wersji Stringowej kodu do joysticka, bo radyjko nadawało właśnie napisy – a nawet napisy z maksymalną długością 32 znaków (bajtów). Poniżej kod:
my poznane dziś rzeczy z poprzednimi zajęciami i nadajemy to, co robimy na naszym kontrolerze. Właśnie dlatego użyliśmy wersji Stringowej kodu do joysticka, bo radyjko nadawało właśnie napisy – a nawet napisy z maksymalną długością 32 znaków (bajtów). Poniżej kod:
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <printf.h>
RF24 radio(9, 10);//CE, CS
uint8_t rxAddr[6] = "grzyb";
void setup(){
Serial.begin(9600);
Serial.print("nRF24 INIT=");
bool ok=radio.begin();
Serial.println(ok);
printf_begin;
radio.printDetails();
radio.setRetries(15, 15);
radio.openWritingPipe(rxAddr);
radio.stopListening();
}
String napis;
void loop(){
napis = String("Heniek ");
napis += String(analogRead(A0));
napis += " ";
napis += String(analogRead(A1));
if (digitalRead(5)==1)
napis += String(" niebieski");
if (digitalRead(4)==1)
napis += String(" bialy");
if (digitalRead(3)==1)
napis += String(" czerwony");
//i tak dalej<br>
radio.write(napis.c_str(), napis.length());
Serial.println(napis);
delay(100);
}
Na uwagę zasługuje linia nr 37, gdzie musiałem użyć nowej metody klasy String o nazwie c_str(), której zadaniem jest stworzenie napisu w stylu języka C (nieobiektowego). Wymuszone jest to przez metodę write() klasy radio. Dodatkowo, długość napisu w klasie String uzyskujemy za pomocą metody length() – a nie sizeof(napis), gdyż to by zwróciło tylko rozmiar obiektu (a nie danych wewnątrz tego obiektu).
Z kolei w linii 26 rozpocząłem nasz napis imieniem (fikcyjnym) uczestnika koła Fi-BOT tak, aby uruchomiony przeze mnie program odbiornika nRF mógł łatwo zidentyfikować kto mi nadaje (Tosiek, Heniek czy Ziuta — także fikcyjne imiona).
Wydawać by się mogło, że trzeba teraz tak przygotowany kod uruchomić do sterowania pojazdem. Nieprawda. Było by to baaaardzo kłopotliwe. Problem polega na tym, że trzeba odczytać napis w odbiorniku nRF umieszczonym w pojeździe, a potem odczytać aktualne wychylenie osi X i Y joya, i przyciski. Ale to trudne! Nawet przy pomocy funkcji toInt() zamieniającej napis na liczbę całkowitą – bo najpier należało by podzielić nasz napis na części – może przecinkami, jakoś tak:
123,512,czerwony,zielony
Czyli wówczas przecinek (kropka, myślnik – cokolwiek) by nam oddzielał jedną informację od drugiej, co by było do wykorzystania w połączeniu z metodą indexOf() z klasy String. Cała procedura mogła by wyglądać jakoś tak:
Proszę zwrócić uwagę, jakie to zagmatfane! Dlatego na kolejnych zajęciach będziemy wysyłać z nadajnika nie napisy (Stringi), ale bajty z informacjami. Dwa bajty wystarczą do podania osi X, kolejne dwa do osi Y, a jeszcze jeden – tylko jeden – do podania stanu wszystkich 7 przycisków na naszym shieldzie. Stworzymy własny protokół danych – podobny do tego, jakiego używaliśmy przy omawianiu oscyloskopu. Dlatego zachęcam do ponownego wczytania się w tamten wpis i opis protokołu danych. Właśnie to nas czeka na następnych zajęciach! Ekscytujące, nieprawdaż? 😉
Przypominam o spotkaniu w ten piątek 19-maja o 14:15 w sprawie XV Festiwalu, a kolejne zajęcia we wtorek 23 maja o godz. 16:15. Nie wiem, czy będziemy mieć siły na 22 więc od razu uprzedzam, że w poniedziałek 22 maja, podczas imprezy Festiwalowej, ustalimy termin kolejnego spotkania Fi-BOTa. Zapraszam!