
Nowy semestr w roku akademickim 2019/2020
Zapraszam zainteresowanych na zajęcia koła Fi-BOT w poniedziałki, o godz. 14:15 do sali 1064 (Wydział Fizyki, Kampus). Będziemy pracować nad rozpoczętymi projektami. Mile widziani studenci ze znajomością platformy Arduino, ale i tak liczy się zaangażowanie. Zapraszam!Radiówka i „grzebek”
Pan Przemek zrealizował proste sterowanie „grzybkiem” (zamiast przycisków). Proste, bo wychylenie gałki (odczyt z analogRead() w zakresie 0..1023) powyżej ustalonej wartości (>700) oznacza ruch w jedną stronę z pełną prędkością, natomiast gałka w drugą stronę (<300) w przeciwną. Tak samo z drugą osią. W kolejnym podejściu prace nad uzależnieniem prędkości od wartości wychylenia (PWM silników skalowane analogReadem grzybka). Jak zawsze coś się musiało rozlutować…
Jak zawsze coś się musiało rozlutować…
PM2D3D Nowe wózki i akceleracja
Pan Bartek udoskonalił nowe wózki i ciągle pracuje nad akceleracją… Więcej o projekcie PM2D3D na dedykowanej stronie.(c) K.G.

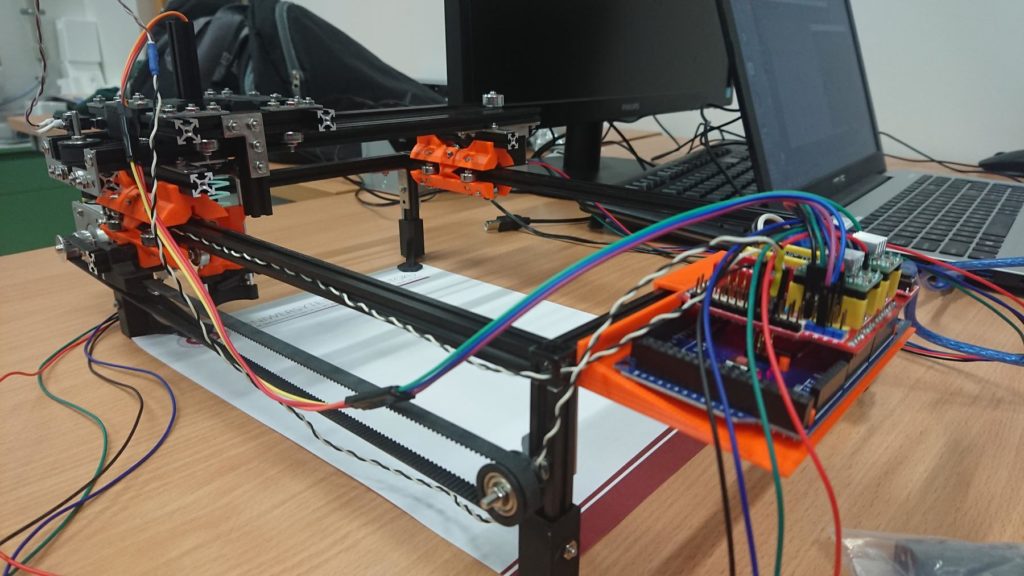 Uważny obserwator bloga zauważy też, że RAMA ma krótsze nóżki 😉 To też pozytywnie wpływa na wibracje pisaka.
Uważny obserwator bloga zauważy też, że RAMA ma krótsze nóżki 😉 To też pozytywnie wpływa na wibracje pisaka.