Tym razem działaliśmy na dwa fronty: jeden zespól klecił hardware ? natomiast drugi pracował nad oprogramowaniem zderzaków, zrobionych z mikrostyków (chodzi oczywiście o wykrycie przeszkody – zareagowanie na klik w przełączniku – i zmianę kierunku jazdy). Oba zespoły wykonały swoją misję. Zdobywają jeden punkt doświadczenia i awansują o +1L ?

Przy okazji softu: okazuje się, że konieczne są zmiany – pojazd nie zawsze „czuje” zderzenie. Albo wymienimy mikrostyki na bardziej czułe (np. krańcówki typu WK320 z miękkimi blaszkami a więc i dużo bardziej czułymi stykami), albo zmienimy soft tak, by był w stanie wykryć zderzenie gdy realizuje jazdę w danym kierunku. Opcję drugą można rozwiązać na co najmniej dwa sposoby, i tym zajmiemy się na następnym spotkaniu.

Wyłącznik krańcowy (krańcówka) WK320. Cena około 1zł za sztukę. Zwrócić należy uwagę na otwory do montażu – nie będzie już konieczności używania kleju i ołówków z Leroya 😉
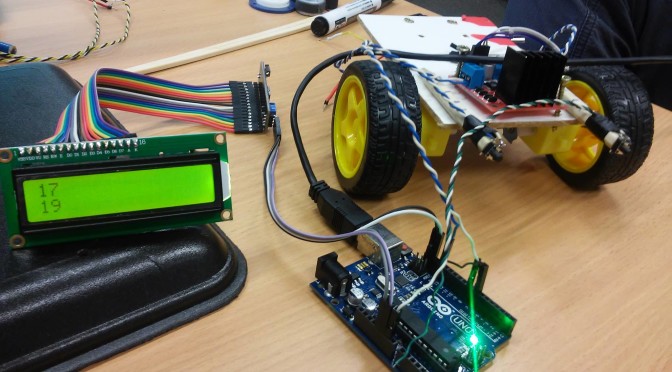
 zym Kole pojawiła się kwestia komunikacji innej niż UART. Podłączyliśmy więc ekranik LCD za pomocą konwertera I2C. Dzięki temu zaoszczędzamy piny mikrokontrolera, które możemy zagospodarować inaczej.
zym Kole pojawiła się kwestia komunikacji innej niż UART. Podłączyliśmy więc ekranik LCD za pomocą konwertera I2C. Dzięki temu zaoszczędzamy piny mikrokontrolera, które możemy zagospodarować inaczej.