Wojny robotów: „kanapka”.
Budujemy podwozie v0.1.
Mieliśmy robić coś prowizorycznego, jednak do montażu kół wykorzystaliśmy przygotowane mocowanie – zaprojektowane i wydrukowane na Wydziałowej drukarce 3D Zoltrax M200. Prosty projekt w Blenderze:
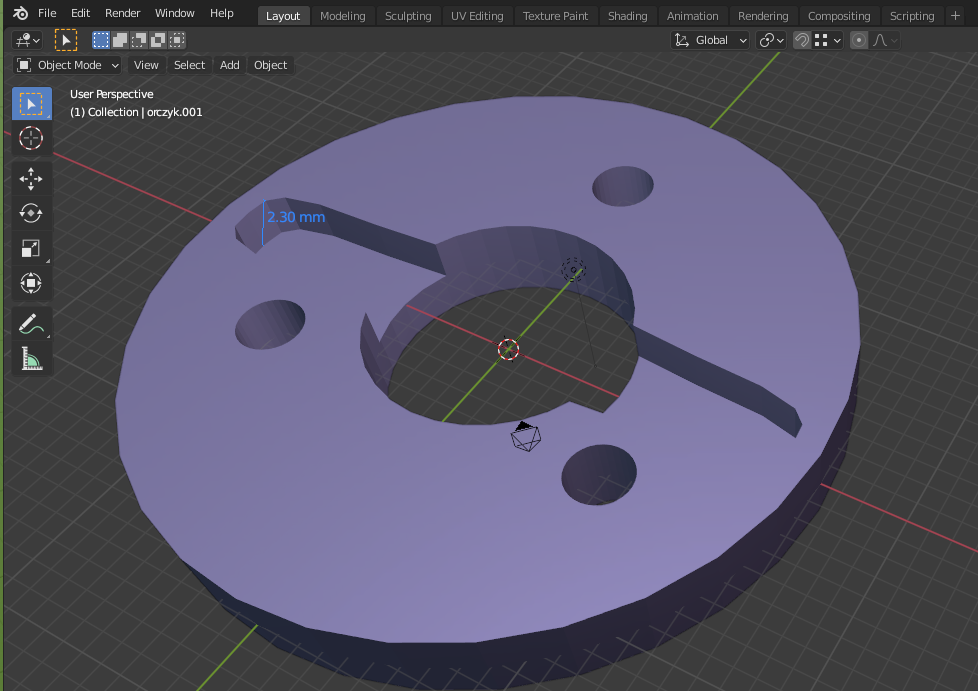
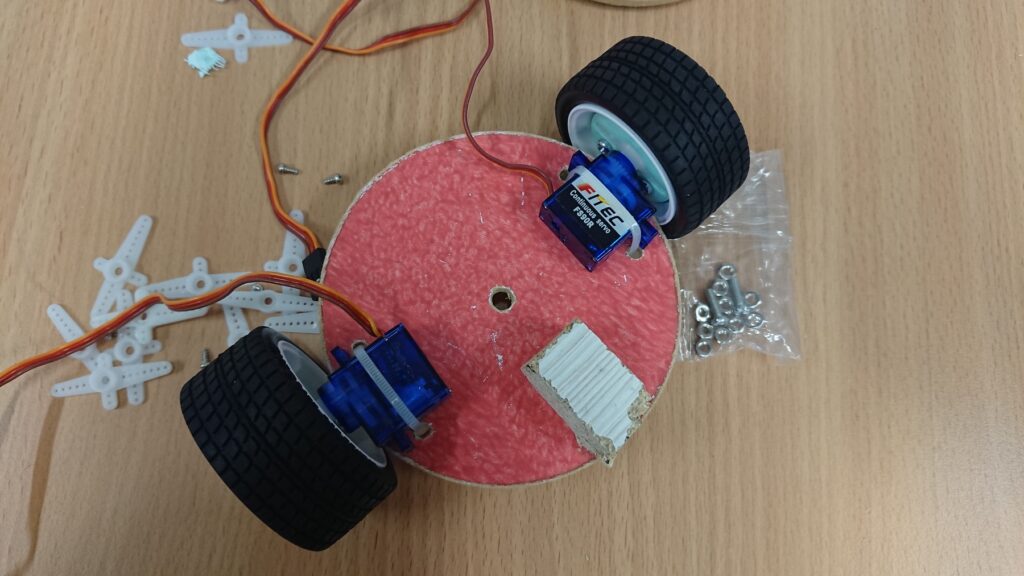
Wydruk 2 sztuk to ~30min pracy drukarki. Efekt poniżej.

Napęd to dwa serwa pracy ciągłej – Feetech FT90R.
Finalnie wszystko wygląda tak:
Mocowanie silników do podwozia – chwilowo trtytkami. Jednak jest to NAJSŁABSZY element tej konstrukcji. Ale wydawał się wystarczający do sprawdzenia, jak działa.
Miało być szybko i minimalistycznie, jednak trzeba wrócić do mocowania silniczków – trytytki należy zmienić na „dedykowane” trzymaki do serw (ponownie projekt 3D i druk na Zoltraxie M200). Liczymy, że dzięki temu pojazd będzie jeździć prosto!
Maskotka
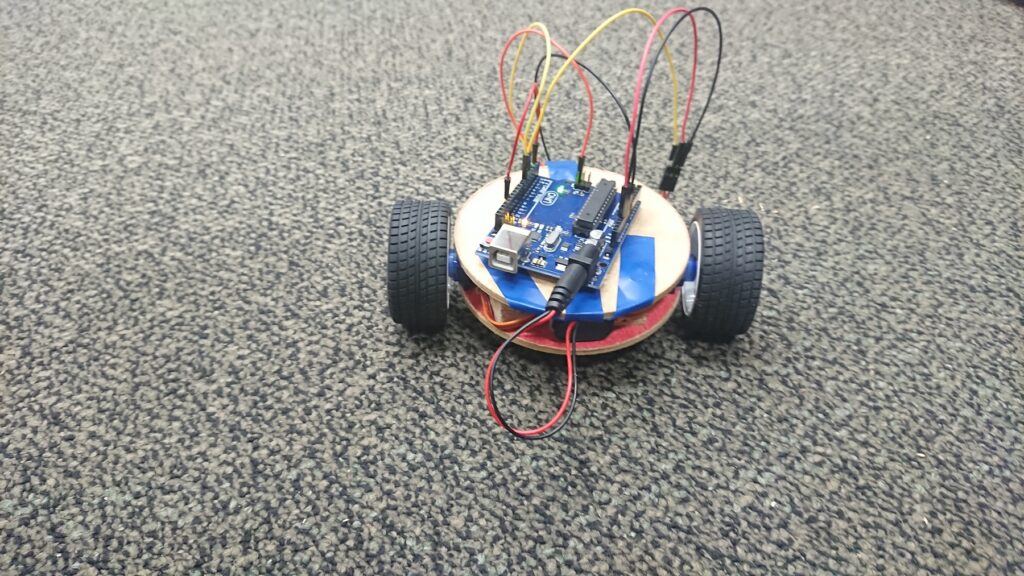
Pan Bartek wraca do projektu Maskotki i zamierza tam wgrać PID-a do lepszego sterowania kołami. Na razie odgrzebał projekt, połączył przewody (sfajczył jedno Arduino UNO – ale jak, tego nikt nie wie) no i projekt jeździ! Z braku swojego kontrolera wykombinował takie oto zabawnie wyglądające cudo 😉
Słychać ten „piękny” pisk podczas zakrętów? Oj słychać… ale jego źródło zostało już zlokalizowane! To nie silniki (jak nam się pierwotnie wydawało), a… trzecie koło! Będzie trzeba coś z tym zrobić.