Fala… z LED-ów…. prawdziwych! Oprócz fal pojawiła się TABLICA i pętla FOR. To sporo – kto nadążał – gratuluję!
Prezentacja Pana Macieja – proste, ale… całkiem efektowne! Gratuluję. Bez pętli zaprogramować coś takiego to koszmar.
Następnie zachęcałem do wirtualnego Arduino ze stronki tinkercad.com (jest to znany projekt cicuits.io, który przejęła firma Autodesk):
Stronka ta umożliwia zabawę w Arduino bez posiadania płytki Arduino – wystarczy się zarejestrować (za darmo!) i można działać.
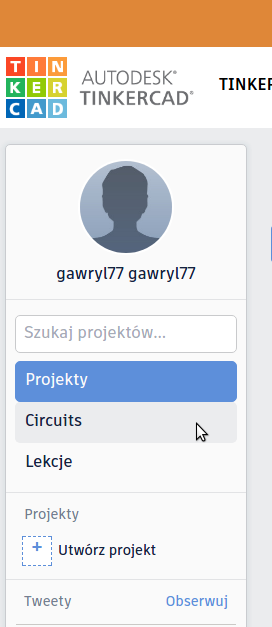
Jak zacząć? Już po rejestracji wybieramy CIRCUITS:
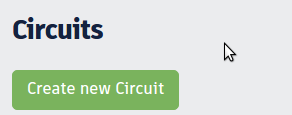
a następnie zielony przycisk Create new circuits:
Kolejnym krokiem jest już dodawanie elementów po naciśnięciu +Components (prawy pasek, na górze)

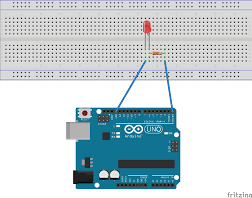
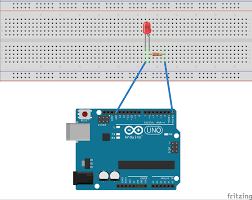
gdzie zaczynamy od płytki stykówki, LED-a, rezystorka i bateryjki. Uruchamiamy symulację przyciskiem Start Simulation (potem ją zatrzymujemy Stop). Gdy już wszystko rozumiemy (tyle-o-ile) to czas na dodanie płytki Arduino i… tu się zaczyna zabawa!
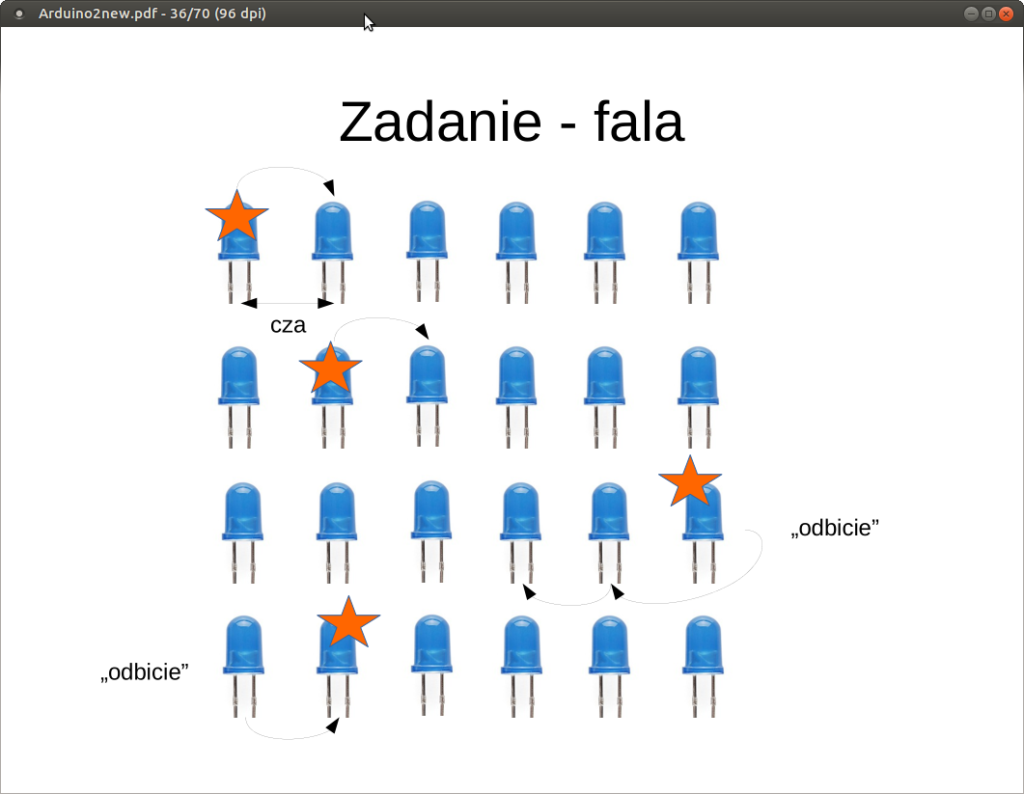
Kto zrobi pracę domową z „odbijającą się” falą? Ze zmienną czas? Na następnych zajęciach wgramy programiki na prawdziwe płytki i zobaczymy kolorowe efekty! Proszę śmiało działać!