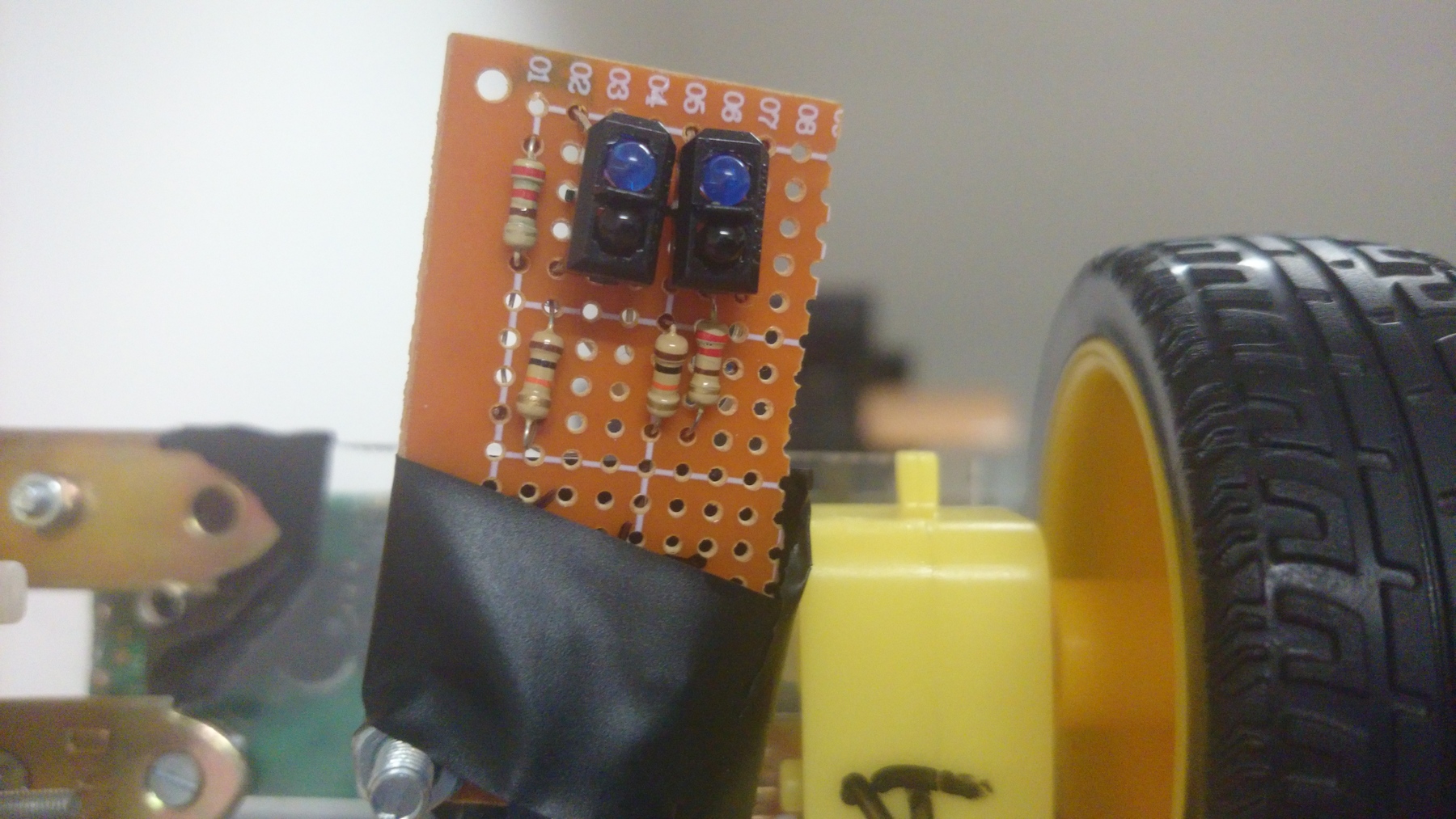
Prosty FL – zbudowany na 2 czujnikach TCRT5000 ustawionych blisko siebie tak, by oba leżały nad czarną linią. Położenie czujek – z przodu, przy napędzie (wiem wiem…).
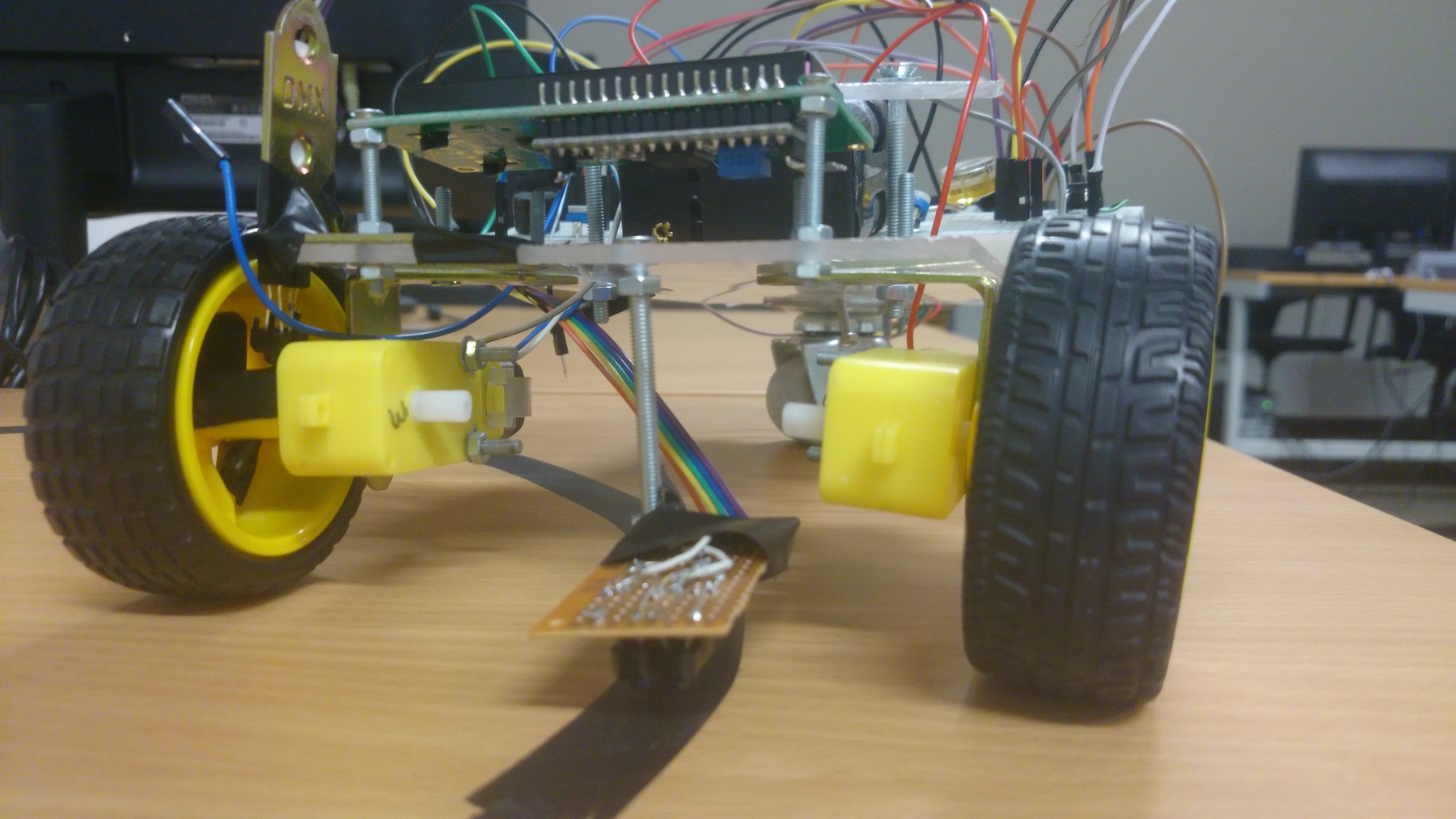
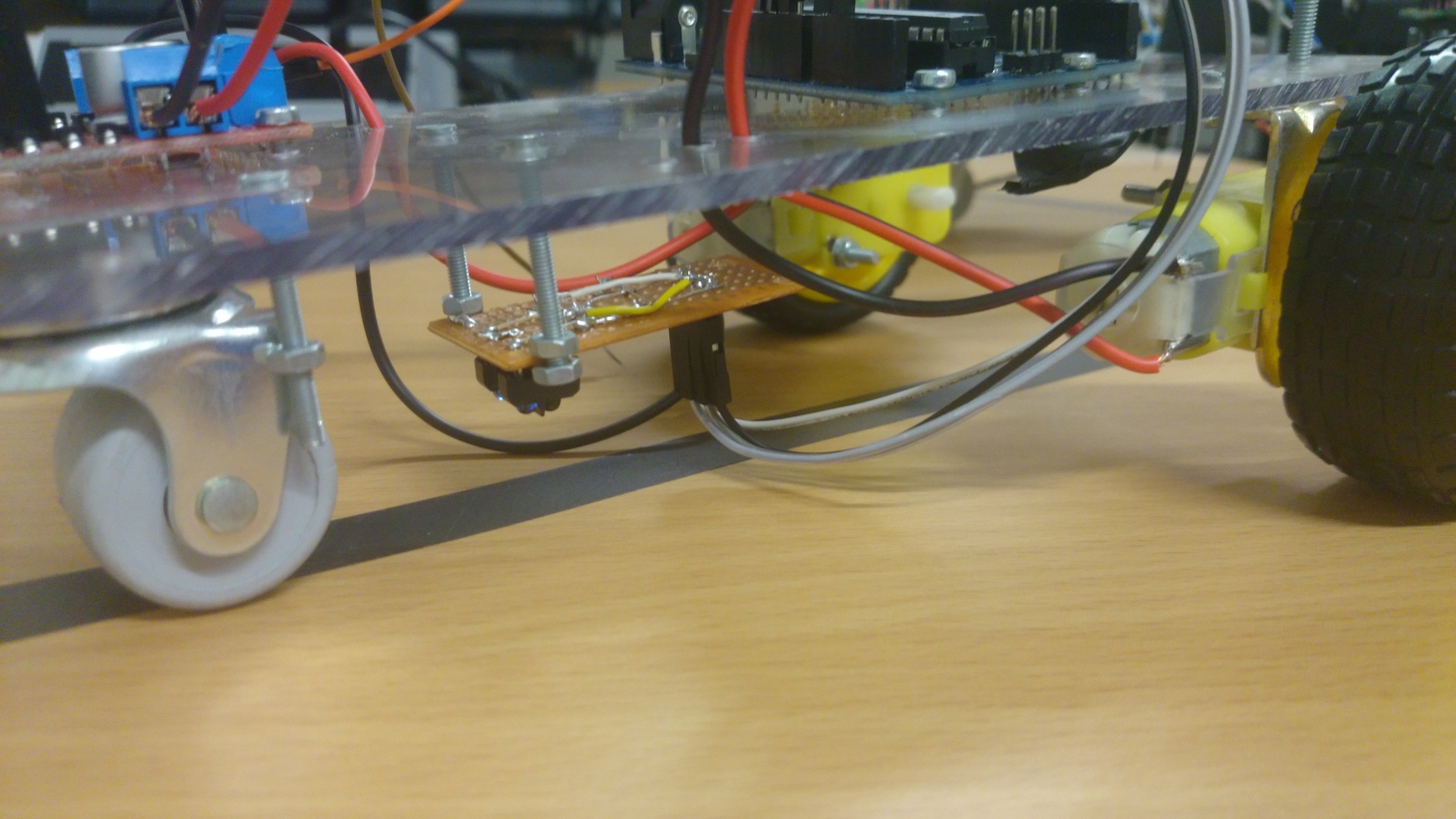
Instalacja modułu w pojeździe.
Pierwszy program – jedź prosto, gdy oba czujniki „widzą” linię.
Modyfikacja – skręcaj (zatrzymując jedno koło) gdy jedna czujka „gubi” linię.
Modyfikacja – silniki STOP, gdy obie czujki zgubiły linię.
Do zrobienia:
(chwilowo) zostaniemy przy 2 czujkach, za to dodamy regulację szybkości kół w zależności od sygnału na czujce (aby nie było szarpania, a ruch był płynny).
gdy pojazd wyjechał poza linię, to ma się cofnąć (może nawet kilka razy, a jeśli po tych kilku razach dalej nie widać linii – to dopiero wówczas STOP).
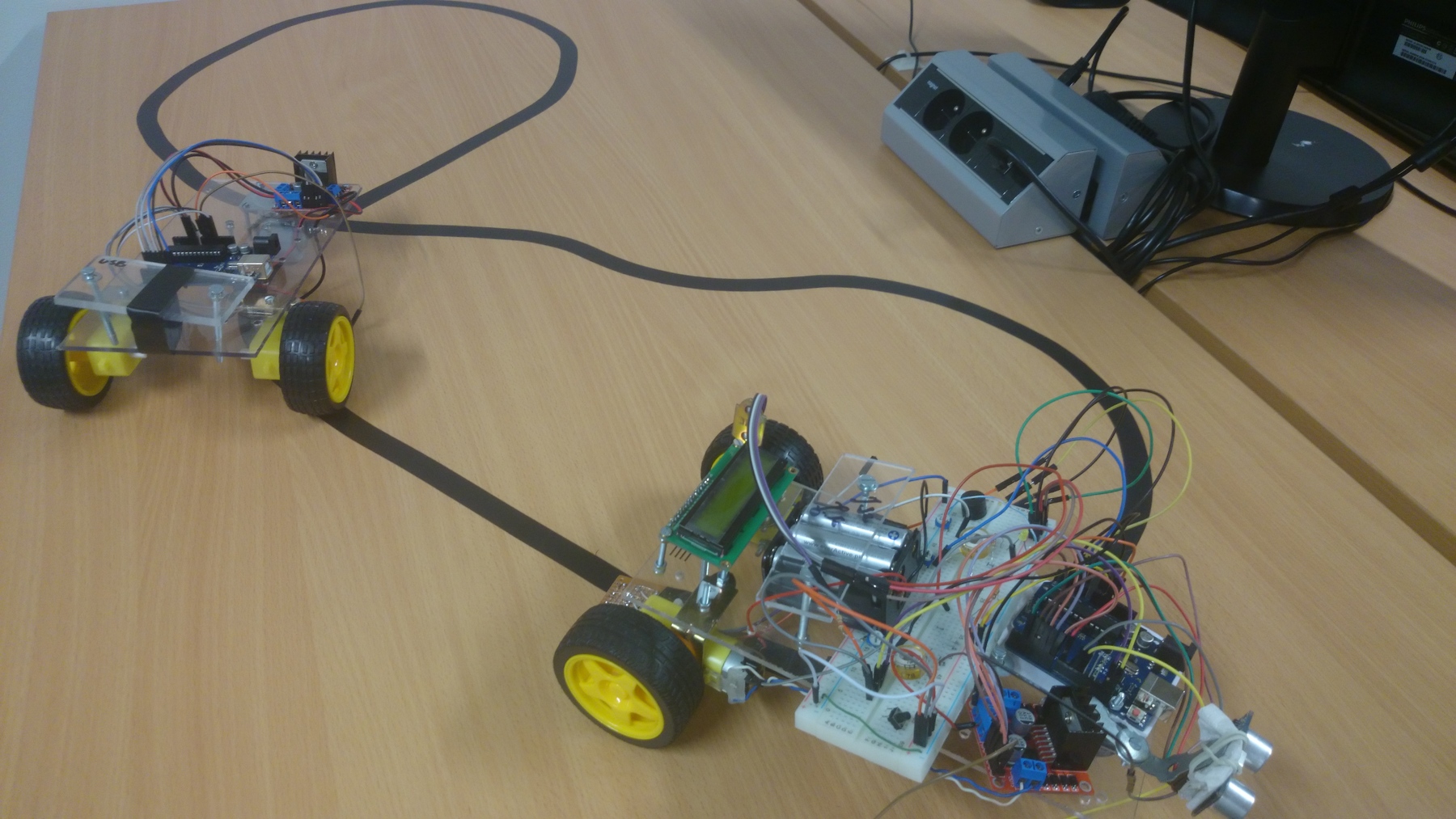
zmodyfikujemy tor testowy – łagodniejsze łuki (łatwiejsze, ale z czasem zmienimy).