Niby niewiele – dwa przyciski włączające oba układy Arduino (niezależne od siebie) – a tu sporo pracy! Ponownie trzeba było pobawić się korkoborem 🙂 a także i nożykiem do papieru – górna podstawa okazała się być lekko za duża, więc zamiast piłować podstawę, ucięliśmy trochę kartonowego korpusu… To rozwiązanie zadziałało, ale w perspektywie jest upgrade obudowy a’la Trabant (dla niewtajemniczonych niemieckimi autami dołączam link z wyjaśnieniem) na wypas blachę i będą schody…
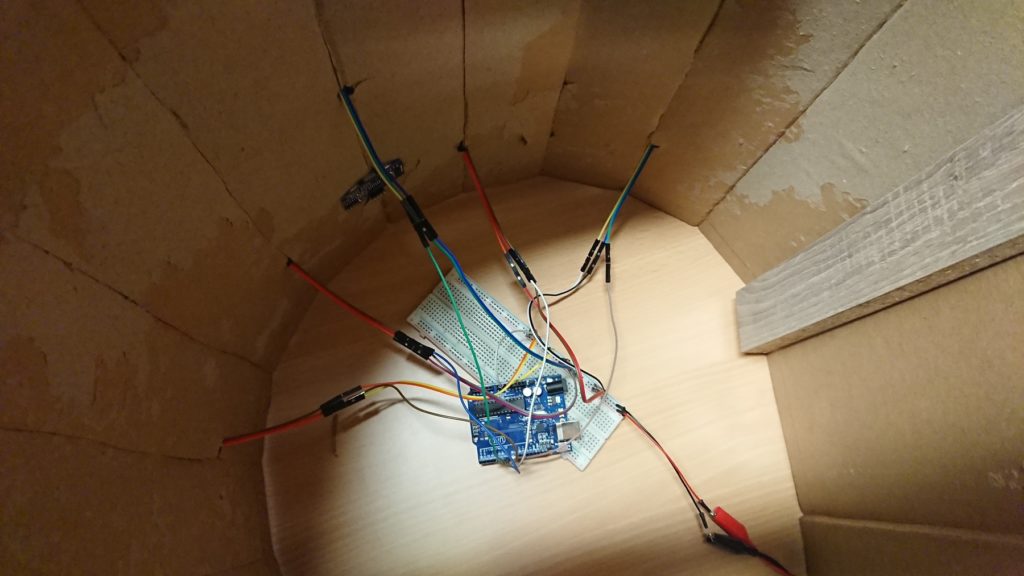
A tak to wszystko teraz wygląda w środku: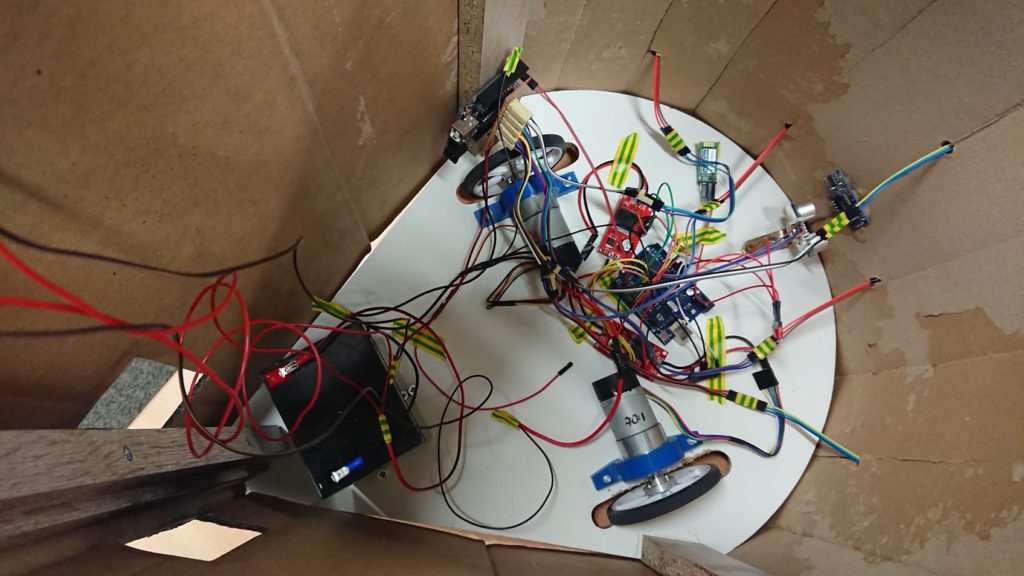
- Pierwsza płytka Arduino UNO steruje silnikami (2x Monster VNH2P30) oraz odbiera komunikację z modułu Bluetooth (XM-15B).
- Druga płytka Arduino UNO steruje oświetleniem (ledy WS2812b). Obie połączone są ze sobą (2x piny cyfrowe) – wybór efektu dla LEDów podaje pierwsza płytka (aktualnie tylko 2 piny, ale może więcej w przyszłości).
- Na drugim Arduino zamocowany jest shield (wykonanie P. Bartek) sterujący ledami z „pro” konektorami 😉
- W perspektywie jest wymiana drugiego UNO na Mega, bo jest chęć dołożenia przycisków – choć można zawsze pobawić się multiplekserem i nie wymieniać na Mega (zobaczymy).
- Dodanie „ukrytych przycisków” do sterowania efektami oświetlenia bez aplikacji AndroidRC – to uniezależni Maskotkę od pierwszego Arduino UNO i zwiększy jej walory demonstracyjne (a także na wypadek jakiejś awarii pierwszego układu).
- Aktualnie sterowanie odbywa się przez Bluetooth (moduł XM-15B) i apkę AndroidRC (bo najprościej i działa). W planach jest zrobienie kontrolera i wykorzystanie modułu radiowego nRF24L01 2.4GHz (który znamy i lubimy).
- Aku trzeba przymocować „pasami” (na rzep).
- Upgrade obudowy (aluminiowa, pomalowana z podkładem).
- Więcej efektów świetlnych?
- Wyszła spora plątanina przewodów… nieelegancko więc będzie trzeba nad tym popracować (zebrac wszystko na płytę główną).
- Wentylacja (w sieć grafenu z drukarki 3D? kto wie…).
- Głośniczek i prosta komunikacja?
- Głowa robota – kask? nadmuchiwany ludek?
- Komunikacja – LCD? OLED?
Testy wykonane, Maskotka „śmiga” i świeci, więc wszem i wobec ogłaszamy, że ten etap zakończyliśmy pomyślnie. Gratuluję wszystkim zaangażowanym!
(c) K.G. 2019