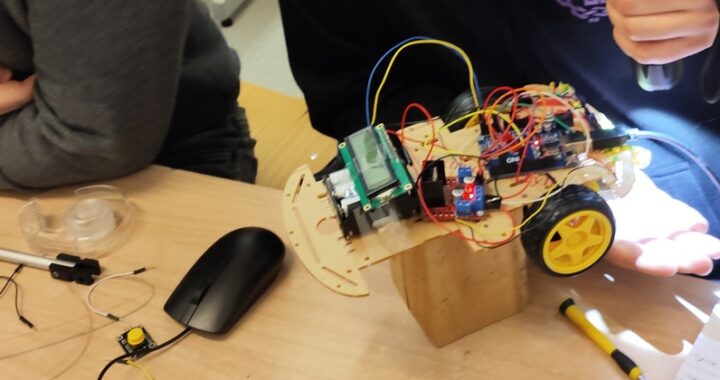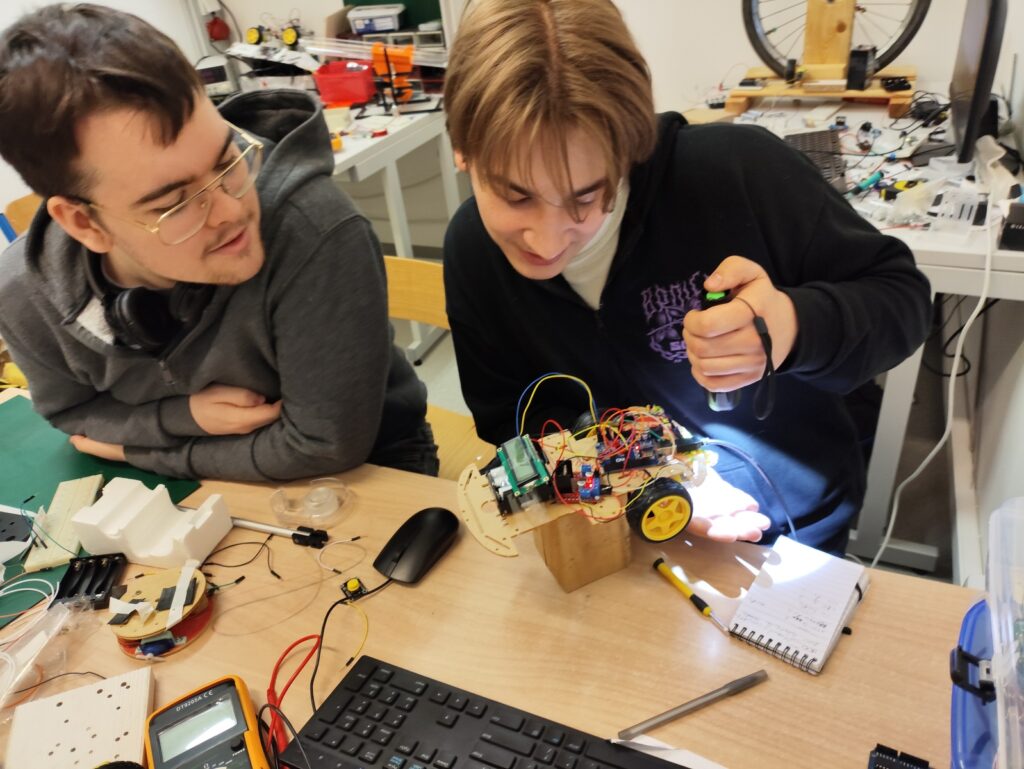
Trwa szlifowanie kodu… a raczej tworzenie go tak, by działał poprawnie 😉 Okazuje się bowiem, że w różnych miejscach testowanej podłogi jest różne oświetlenie (zastane) – o dziwo! 😀 Wbite na sztywno wartości odczytane z czujników nie pracują 😉 Na tym właśnie polega ta zabawa! Rozwiązanie? aktualizować światło zastane co 1s? Tak działa jeden zespół. Drugi kombinuje z hardware – wprowadza jakąś przeszkodę blokującą światło zastane – ciekawe, co z tego wyjdzie.
Zawody
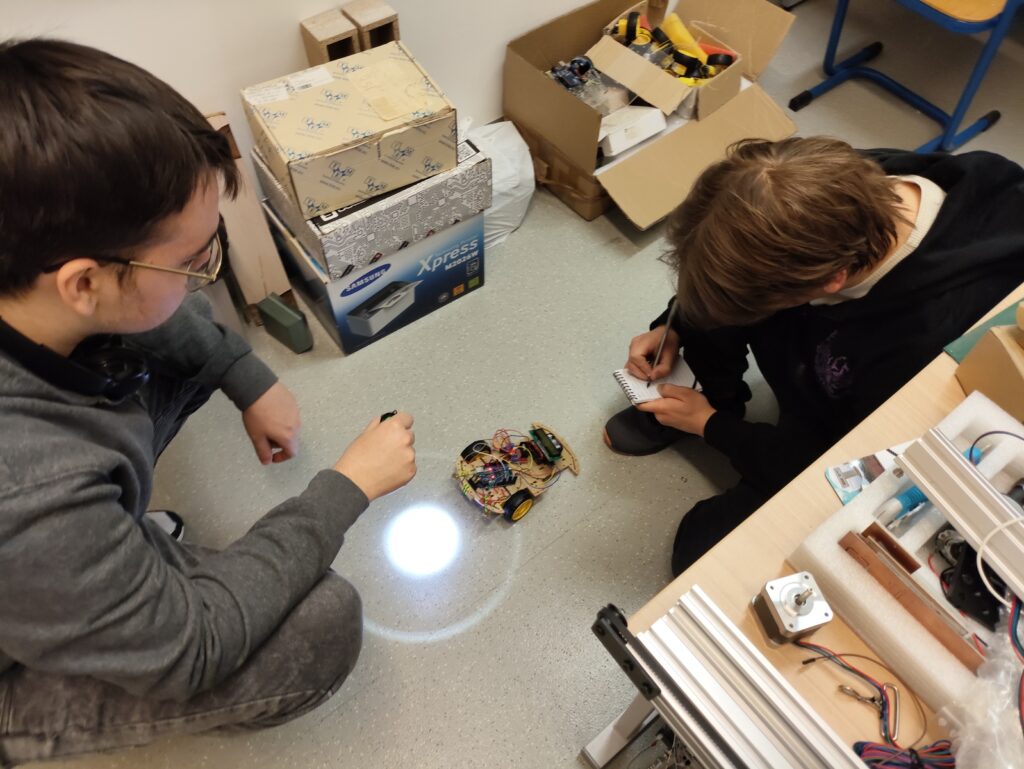
Jeśli sterowanie będzie działać, to sprawdzimy to w ekstremalnej sytuacji- postawimy dwie przeszkody, będzie trzeba je objeżdźać – kręcąc tzw. ósemki. Zmierzymy czas trzech okążeń i się okaże, który zespół jest lepszy 😉
(c) K.G. 2025