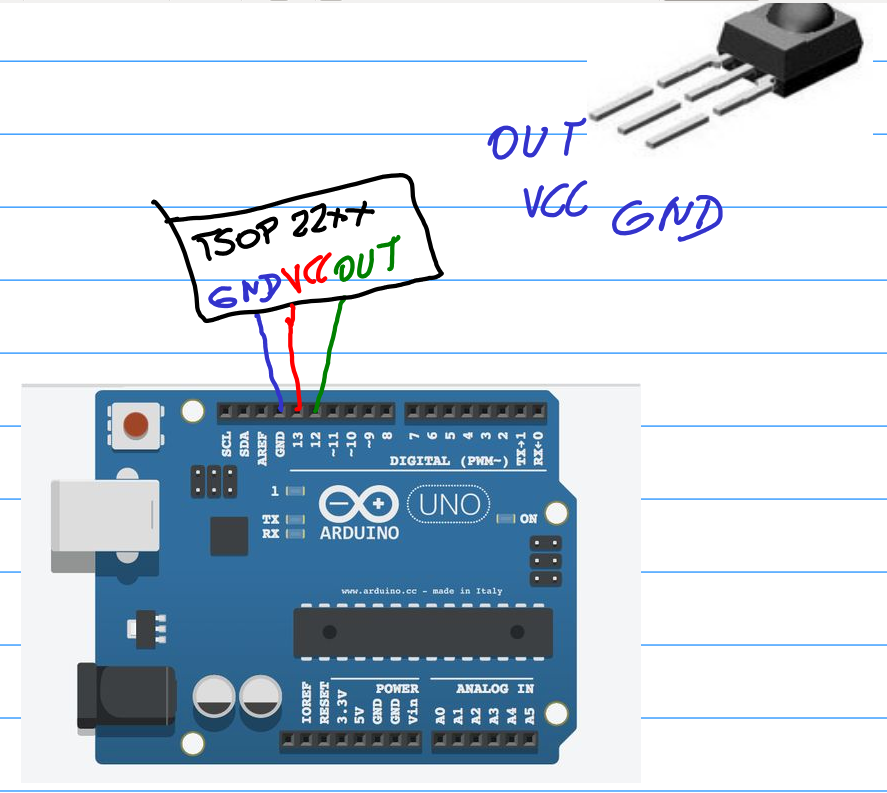
Pojazd sterowany – TSOP23xx
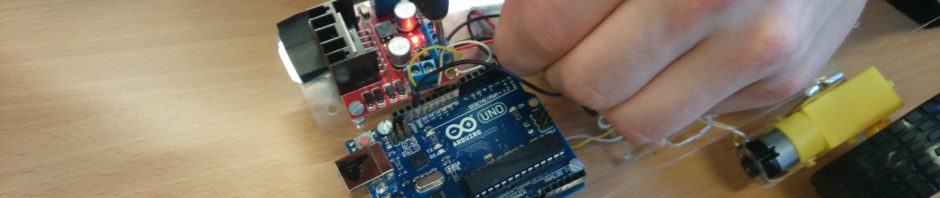
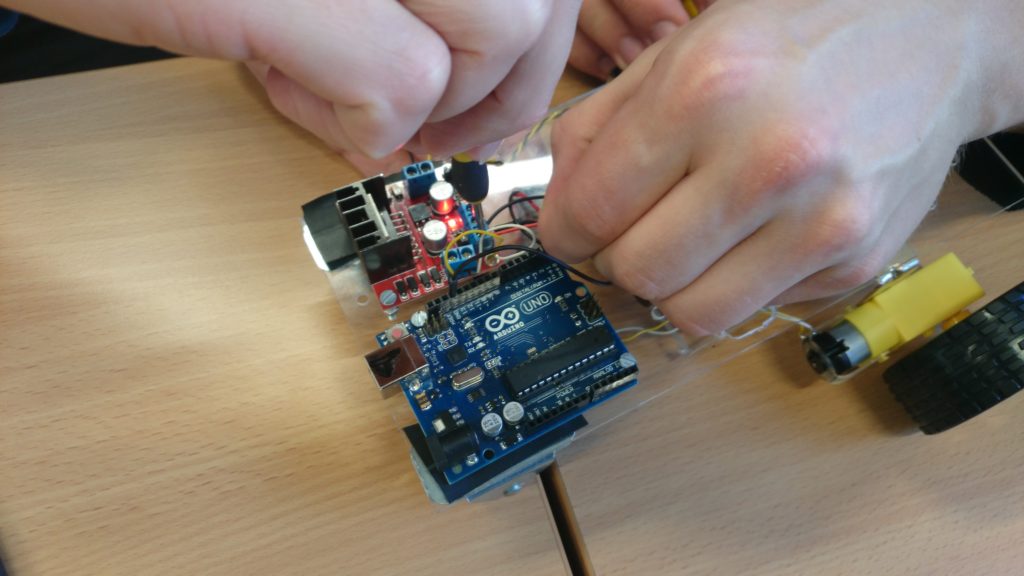
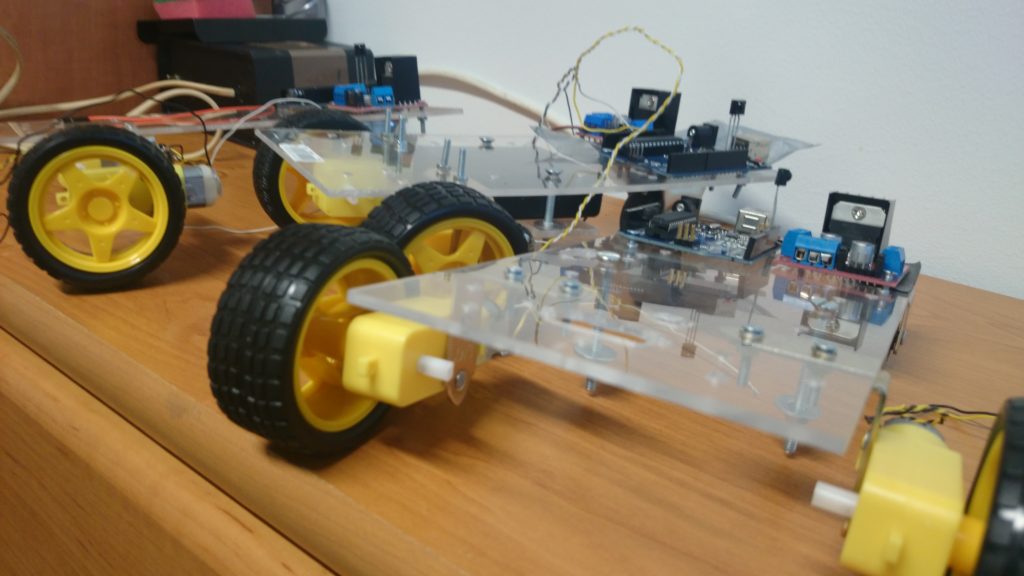
Pan Przemek uporał się z płynnym sterowaniem pojazdu (naprawa softu) – auto śmiga teraz całkiem gładko! Koła nie są uruchamiane i zatrzymywane na określony czas po wciśnięciu danego przycisku – brak efektu „czkawki”. Zamiast tego, auto zatrzymuje się gdy użytkownik zwolni przycisk na pilocie. Obsługiwane są też kody repetycji przycisku, w tym także tajemniczy kod ZERO – który pojawiał się na skutek jakiś problemów komunikacji pilota z czujką TSOP. Można więc się cieszyć, choć pilot płata figle i… mimo wszystko zrywa się komunikacja – wówczas auto się zatrzymuje (na chwilę, bo w końcu przycisk cały czas jest wciśnięty więc po chwili auto rusza). śmiało można to nazwać sukcesem. Niestety – testowy pojazd jest kiepski – 4 koła mają różne silniczki i jeden z nich działa zdecydowanie słabiej niż reszta, przez co auto marnie jeździ po podłodze (wykładzina = duże tarcie, trefne koło stoi w miejscu zamiast się kręcić). Będzie trzeba zmienić platformę (na zmodyfikowane serwomechanizmy – ale o tym za tydzień). Za tydzień też zastosowanie tej części kodu w komunikacji radiowej (lepszej niż na podczerwień).Precyzyjna Maszyna (PM2D3D) – soft
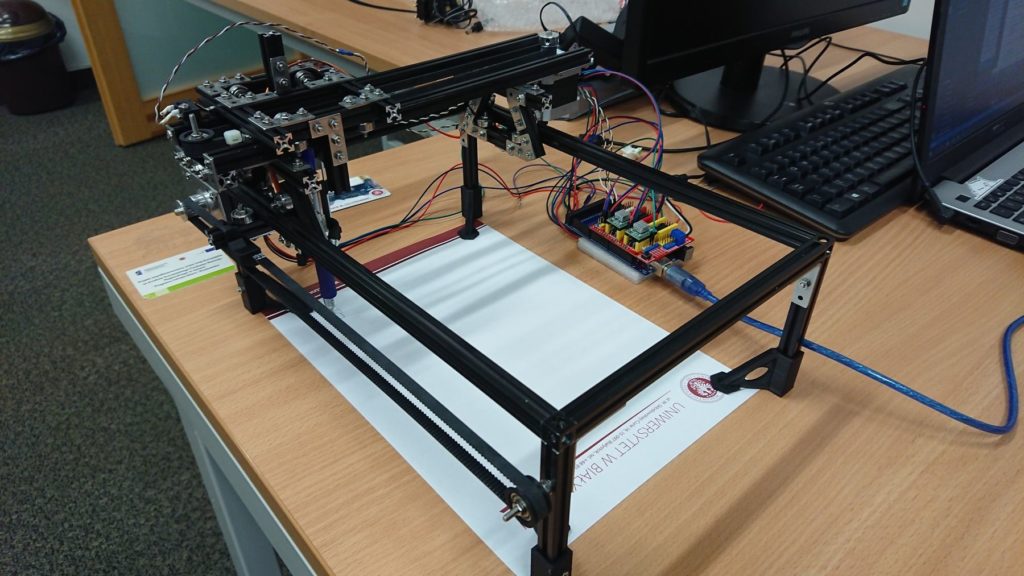
Kolejne prace nad softem, wydruk wydaje się zachęcający 😉 Z poziomu GRAPH CREATORA można już tworzyć grafikę, która zostanie przeniesiona na kartkę papieru. Brawo!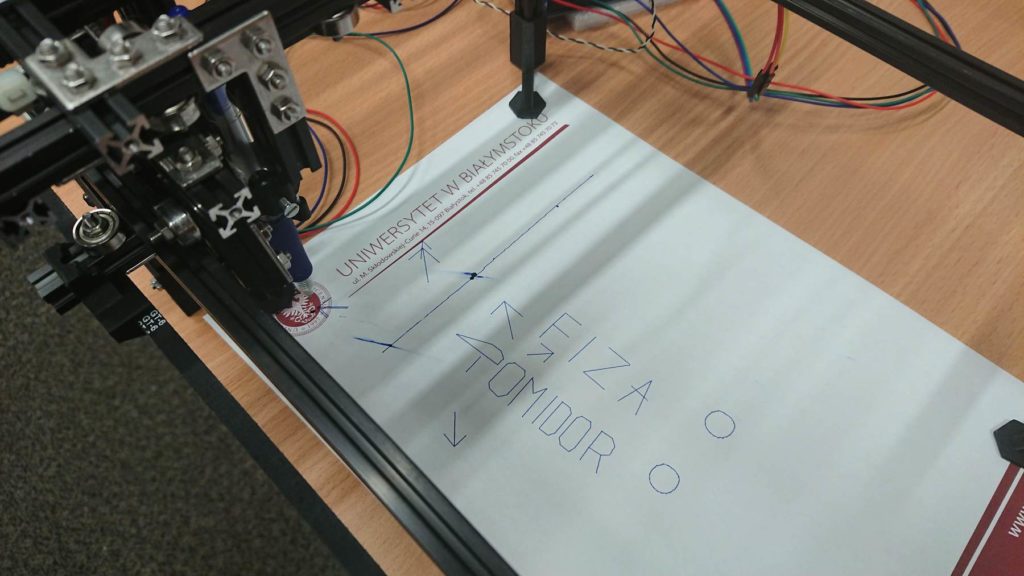 Więcej o projekcie Maszyny na stronie projektu.
Więcej o projekcie Maszyny na stronie projektu.
(c) K.G.
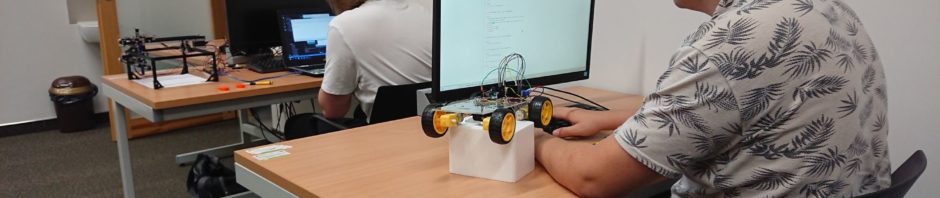
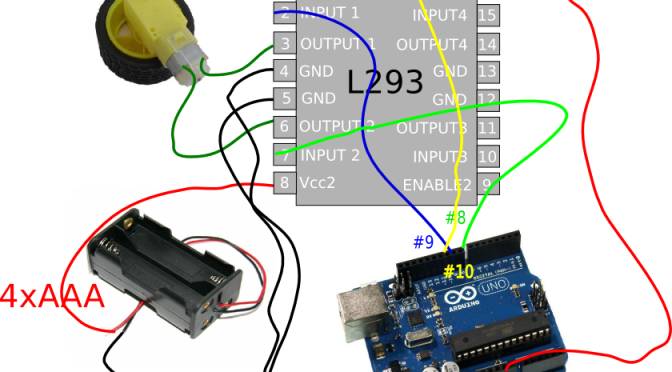
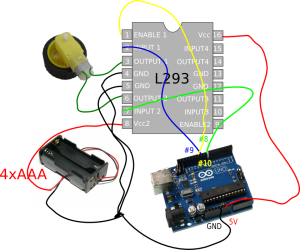
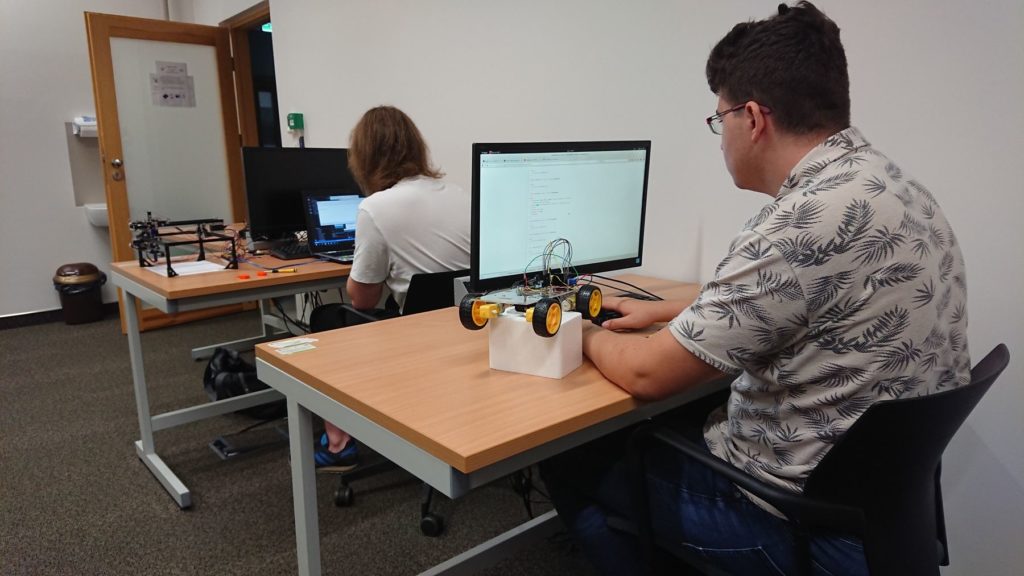 Wspólnie ustaliliśmy, że każdokrotne naciśnięcie przycisku do przodu na pilocie uruchamia silniki na zadany czas (np. 100ms) a następnie je wyłącza. Tak samo z jazdą do tyłu – włączamy odpowiednio silniki (ponownie na 100ms) a potem je wyłączamy (no i ze skrętami tak samo). Wszystko ładnie działało, ale… nie do końca. Silniki są cały czas włączane i wyłączane – a wiadomo, że prąd potrzebny na „rozruch” silnika jest znacznie większy niż podczas jego pracy ze stałą prędkością. Nie ma potrzeby je zatrzymwać, jeśli użytkownik trzyma wciśnięty dany przycisk! Dodatkowo, przy mniejszym czasie pracy silnika (nie 100ms a 50ms czy nawet 20ms) samochód miał „czkawkę” – ciągle uruchamiał i zatrzymywał silniczki. Te dwa powody były wystarczające do zmiany pierwszej wersji kodu – na bardziej zaawansowaną, która nie wyłącza silnika gdy ciągle wciskamy ten sam przycisk. „Czkawka” została (częściowo) opanowana, ale… są błędy w kodzie 🙁 Na dodatek należy obejść (dobrze zaprogramować) błędy w komunikacji pilota na podczerwień z czujką TSOP23xx – przy trzymanym przycisku pojawia się tajemniczy kod ZERO, co przerywa pracę silników. Za tydzień się z tym uporamy!
Wspólnie ustaliliśmy, że każdokrotne naciśnięcie przycisku do przodu na pilocie uruchamia silniki na zadany czas (np. 100ms) a następnie je wyłącza. Tak samo z jazdą do tyłu – włączamy odpowiednio silniki (ponownie na 100ms) a potem je wyłączamy (no i ze skrętami tak samo). Wszystko ładnie działało, ale… nie do końca. Silniki są cały czas włączane i wyłączane – a wiadomo, że prąd potrzebny na „rozruch” silnika jest znacznie większy niż podczas jego pracy ze stałą prędkością. Nie ma potrzeby je zatrzymwać, jeśli użytkownik trzyma wciśnięty dany przycisk! Dodatkowo, przy mniejszym czasie pracy silnika (nie 100ms a 50ms czy nawet 20ms) samochód miał „czkawkę” – ciągle uruchamiał i zatrzymywał silniczki. Te dwa powody były wystarczające do zmiany pierwszej wersji kodu – na bardziej zaawansowaną, która nie wyłącza silnika gdy ciągle wciskamy ten sam przycisk. „Czkawka” została (częściowo) opanowana, ale… są błędy w kodzie 🙁 Na dodatek należy obejść (dobrze zaprogramować) błędy w komunikacji pilota na podczerwień z czujką TSOP23xx – przy trzymanym przycisku pojawia się tajemniczy kod ZERO, co przerywa pracę silników. Za tydzień się z tym uporamy!
 Więcej o projekcie Maszyny na
Więcej o projekcie Maszyny na