Pojazd sterowany – TSOP23xx
Pan Przemek zapoznał się z odbiornikiem podczerwieni TSOP 2230, dzięki któremu jego pojazd był sterowany bezprzewodowo. Poniżej prosty programik do dekodowania sygnałów z pilota telewizyjnego z wykorzystaniem biblioteki IRLib (do pobrania w dziale Do pobrania):#define IR 12
#include <IRLib.h>
IRrecv pilot(IR);//pin
IRdecode dekoder;
void setup(){
pilot.enableIRIn();//uruchamiamy odbiornik IR
Serial.begin(9600);
}
void loop(){
if (pilot.GetResults(&dekoder)) {
dekoder.decode(); //dekoduj dane
pilot.resume(); //restartuj odbiornik
Serial.println(dekoder.value);//kody klawiszy! zanotuj je sobie....
}//if
}/loop
Po zapisaniu sobie kodów pilota TV można zmienić program do poruszania naszym samochodzikiem – instrukcjami typu if (dekorer.value==432421) jedz_do_przodu() — oczywiście funkcję tą należało wcześniej sobie napisać 😉
 Wspólnie ustaliliśmy, że każdokrotne naciśnięcie przycisku do przodu na pilocie uruchamia silniki na zadany czas (np. 100ms) a następnie je wyłącza. Tak samo z jazdą do tyłu – włączamy odpowiednio silniki (ponownie na 100ms) a potem je wyłączamy (no i ze skrętami tak samo). Wszystko ładnie działało, ale… nie do końca. Silniki są cały czas włączane i wyłączane – a wiadomo, że prąd potrzebny na „rozruch” silnika jest znacznie większy niż podczas jego pracy ze stałą prędkością. Nie ma potrzeby je zatrzymwać, jeśli użytkownik trzyma wciśnięty dany przycisk! Dodatkowo, przy mniejszym czasie pracy silnika (nie 100ms a 50ms czy nawet 20ms) samochód miał „czkawkę” – ciągle uruchamiał i zatrzymywał silniczki. Te dwa powody były wystarczające do zmiany pierwszej wersji kodu – na bardziej zaawansowaną, która nie wyłącza silnika gdy ciągle wciskamy ten sam przycisk. „Czkawka” została (częściowo) opanowana, ale… są błędy w kodzie 🙁 Na dodatek należy obejść (dobrze zaprogramować) błędy w komunikacji pilota na podczerwień z czujką TSOP23xx – przy trzymanym przycisku pojawia się tajemniczy kod ZERO, co przerywa pracę silników. Za tydzień się z tym uporamy!
Wspólnie ustaliliśmy, że każdokrotne naciśnięcie przycisku do przodu na pilocie uruchamia silniki na zadany czas (np. 100ms) a następnie je wyłącza. Tak samo z jazdą do tyłu – włączamy odpowiednio silniki (ponownie na 100ms) a potem je wyłączamy (no i ze skrętami tak samo). Wszystko ładnie działało, ale… nie do końca. Silniki są cały czas włączane i wyłączane – a wiadomo, że prąd potrzebny na „rozruch” silnika jest znacznie większy niż podczas jego pracy ze stałą prędkością. Nie ma potrzeby je zatrzymwać, jeśli użytkownik trzyma wciśnięty dany przycisk! Dodatkowo, przy mniejszym czasie pracy silnika (nie 100ms a 50ms czy nawet 20ms) samochód miał „czkawkę” – ciągle uruchamiał i zatrzymywał silniczki. Te dwa powody były wystarczające do zmiany pierwszej wersji kodu – na bardziej zaawansowaną, która nie wyłącza silnika gdy ciągle wciskamy ten sam przycisk. „Czkawka” została (częściowo) opanowana, ale… są błędy w kodzie 🙁 Na dodatek należy obejść (dobrze zaprogramować) błędy w komunikacji pilota na podczerwień z czujką TSOP23xx – przy trzymanym przycisku pojawia się tajemniczy kod ZERO, co przerywa pracę silników. Za tydzień się z tym uporamy!
Precyzyjna Maszyna (PM2D3D) – soft
Choć najwięcej zmian zostało w softwarze – to nastąpiła także modyfikacja konstrukcji ramy: silniki zostały przeniesione z jednej strony na przeciwne, aby zrónoważyć całą konstrukcję. Ciągle pozostaje kwestia dodania przeciwwagi po przeciwnej stronie ramy, aby nie tylko kirunek wschód-zachód był zrównoważony, ale także północ-południe. Dodatkowy ciężarek będzie pewnie w niedalekiej przyszłości, gdy powstanie panel do sterowania. Są też anty-poślizgowe nóżki do ramy, z dodatkowymi „dociskaczami” kartki A4 (wydrukowane w 3D). Jak wspomniano, najwięcej zmian Pan Bartek wykonał w sofcie i… poprawnie rysowane są już ukośne linie! Brawo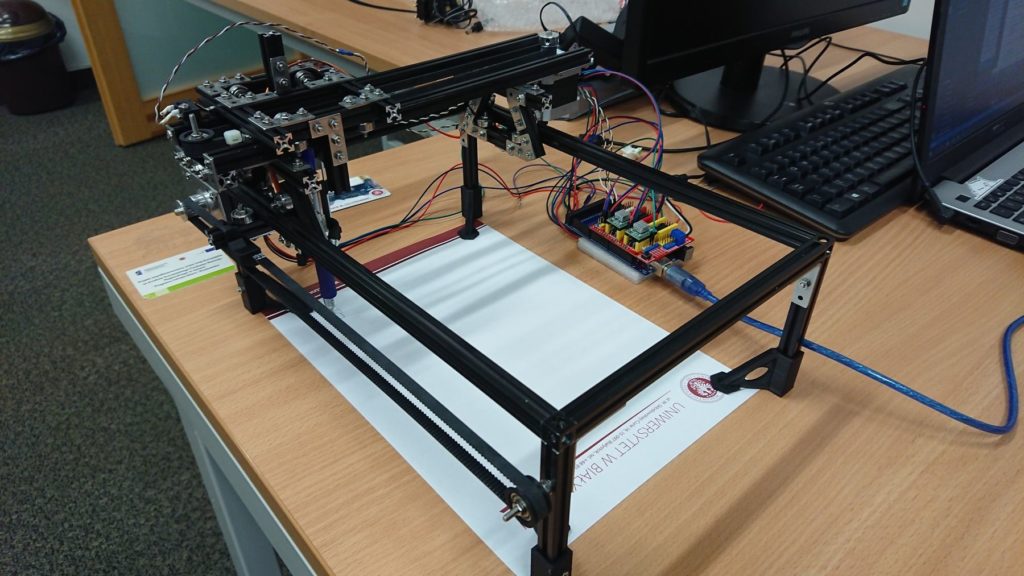 Więcej o projekcie Maszyny na stronie projektu.
Więcej o projekcie Maszyny na stronie projektu.
(c) K.G.