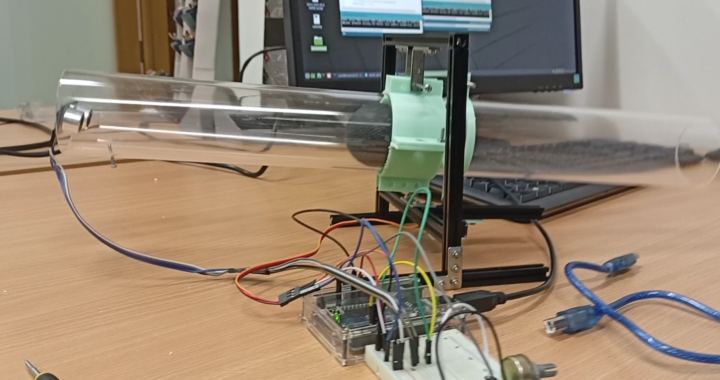
Wracamy do huśtawki z nowym podejściem – sterowaniem z wykorzystaniem PID-a. Niestety, konstrukcja mechaniczna uniemożliwiła poprawną pracę układu… trzeba ponownie popracować nad mocowaniem ramienia łączącego serwo z pierścieniem rury.
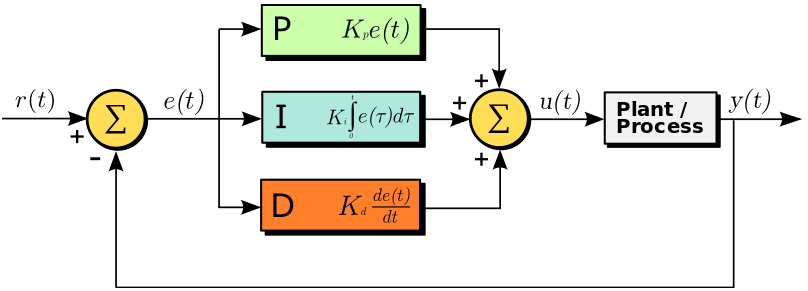
Warto przeczytać ten artykulik ze wprowadzeniem do PID-a:
Mamy Nowy Rok 2022 i pierwsze spotkanie Koła Fi-BOT. Fajnie, że studenci pracują pomimo przerwy świątecznej, bo wyniki są bardzo ciekawe!
Huśtawka w działaniu.
Pan Stanisław uparł się na dopracowaniu konstrukcji mechanicznej oraz oprogramowania. Sam nie wiem, co było bardziej marudne… Przypomnę na czym polega zabawa w huśtawkę – należy tak sterować położeniem rury (góra/dół – tym zajmuje się serwosilniczek), aby kulka znajdująca się wewnątrz znalazła się w środku rury. To dość znane zagadnienie, ale Pan Stanisław podszedł do tego niestandardowo – zastosował wzorki z fizyki dla zsuwającej się kulki z równi pochyłej (z uwzględnieniem jej obrotów, czyli mechanik bryły sztywnej). Nie ma tu żadnego PID-a, tylko czystka fizyka! Czy to działa? Działa! o dziwo – jak dla mnie – bo myślałem, że taki sposób spowoduje ciągłe bujanie piłki w lewo i w prawo. A tu proszę! Gratulacje! Ze względu na zbliżającą się sesję egzaminacyjną opis rozwiązania zostanie dodany gdzieś w miesiącu luty (po sesji).
W międzyczasie Pan Bartek kombinuje z produkcją płytek PCB na hobbystycznej frezarce CNC, a Pan Dominik wymyślił bardzo nieszablonowy sposób poruszania huśtawką (warto go zrealizować! choć będzie trzeba popracować mechanicznie).
Fajnie, że właśnie tak rozpoczął się Nowy Rok na Fi-BOTcie!
Poniedziałek to nie dzień spotkań koła, ale kto chętny – może! I tak Pan Stanisław postanowił wykorzystać okienko w swoich zajęciach i przystąpił do ulepszania konstrukcji…
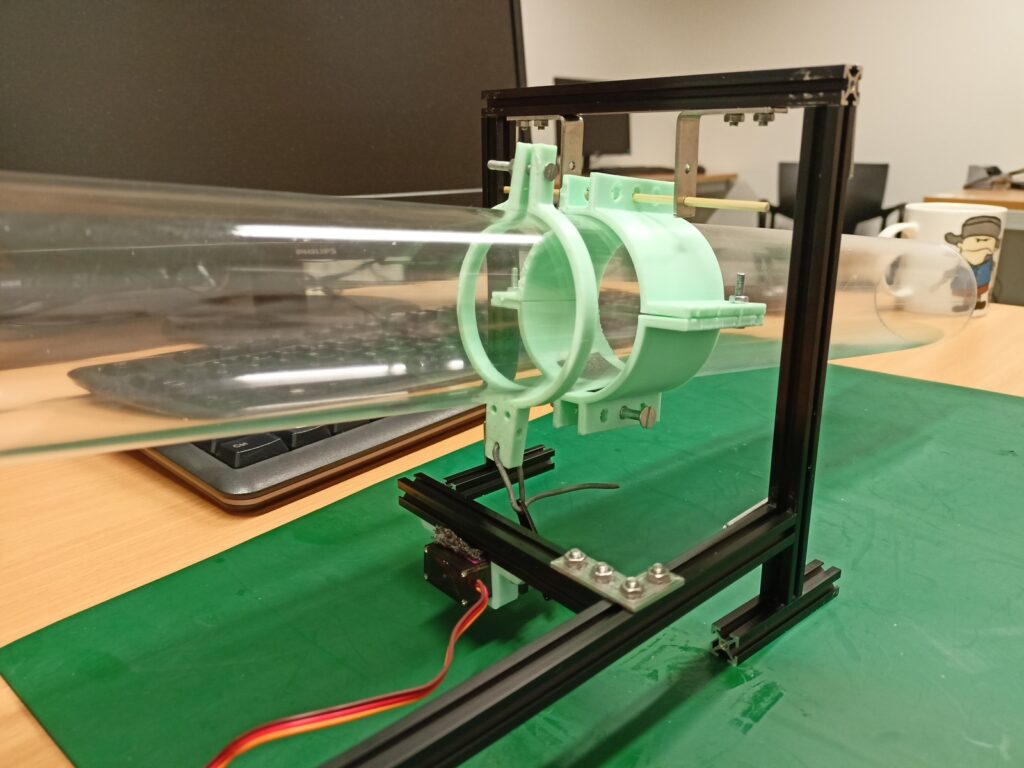
Druga wersja huśtawki.
Konstrukcja „buja” się już mniej, pomimo zastąpienia trytytek sztywną wykałaczką 😉 Liczy się pomysłowość! Dalej są spore luzy, bo otwory w obejmie są za duże w stosunku do grubości wykałaczki. Wybór wykałaczki nie jest jednak przypadkowy – idealnie rozmiarami pasuje do otworów w metalowych (oryginalnych) profilach Maker Beama (podwieszenie w górnej części konstrukcji).
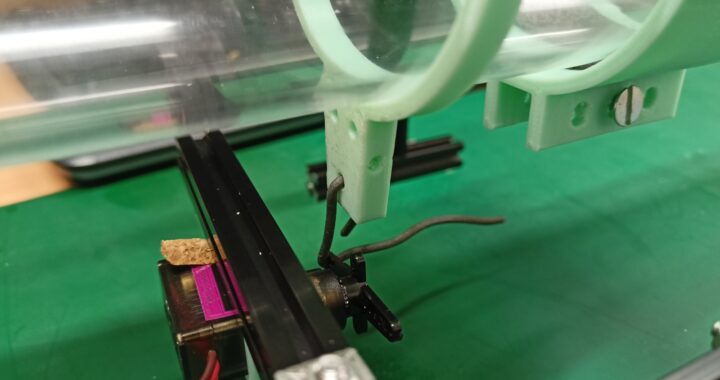
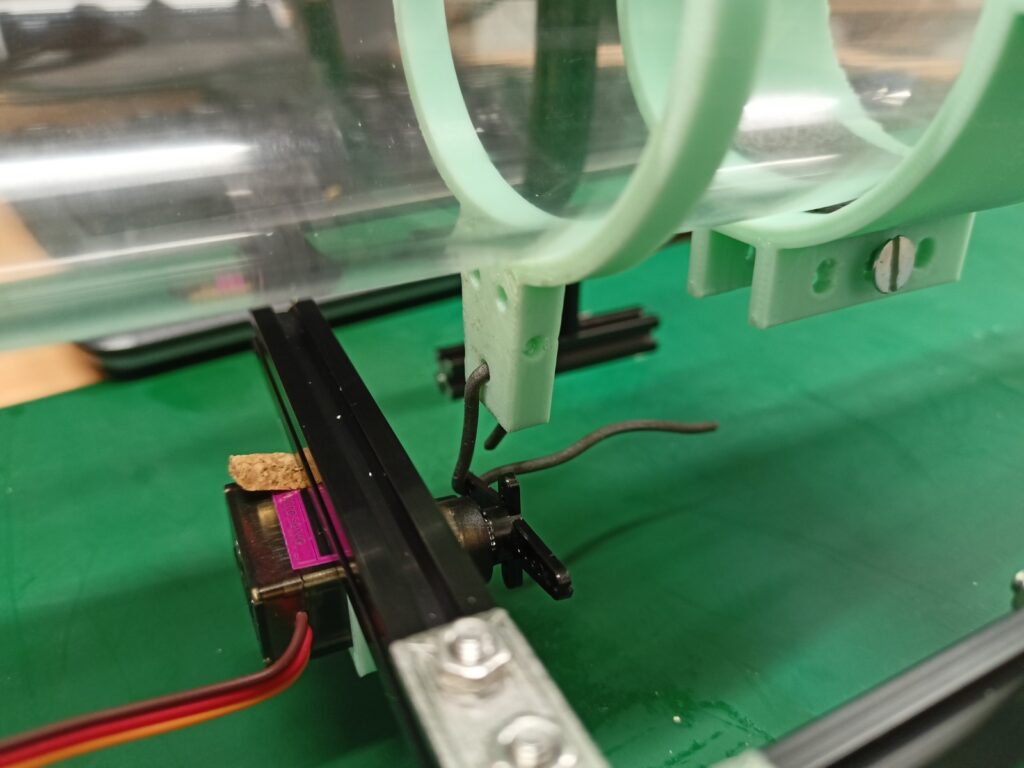
Na uwagę zasługuje pierwsza próba łączenia serwa z obejmą rury – wykorzystano gruby, małoplastyczny pręcik. Te dwie jego cechy są tutaj jego zaletami – tworzy on bowiem sztywne połączenie. Były problemy przy jego wyginaniu i przetykaniu przez otwory, ale co tam. Jest pierwsze podejście. Czy działa? Filmik poniżej:
Pierwsze próby sterowania serwem.
Działa to zdecydowanie gorzej niż się spodziewaliśmy 😛 Wszędzie te luzy! No i nogi (płozy?) zdecydowanie za krótkie (i za lekkie, trzeba dociążyć). W międzyczasie pojawił się Pan Bartek i zaproponował wymianę pianki (w mocowaniu serwa) na coś sztywniejszego… korek! Sam się zdziwiłem, że to Pan Bartek zaproponował! Wersja 2 i pół po lekkiej modyfikacji:
Wersja 2.5 huśtawki.
Jednak to niewiele pomogło… Pan Bartek skrzywił się tylko, spytał o średnicę rury i chyba postanowił przygotować nowy projekt w 3D aby przyspieszyć pracę nad projektem 😉 Zobaczymy!
Studenci dzielnie pracują nad projektem sterowanej huśtawki (samopoziomującej się). Schemat układu z poprzedniego tygodnia:
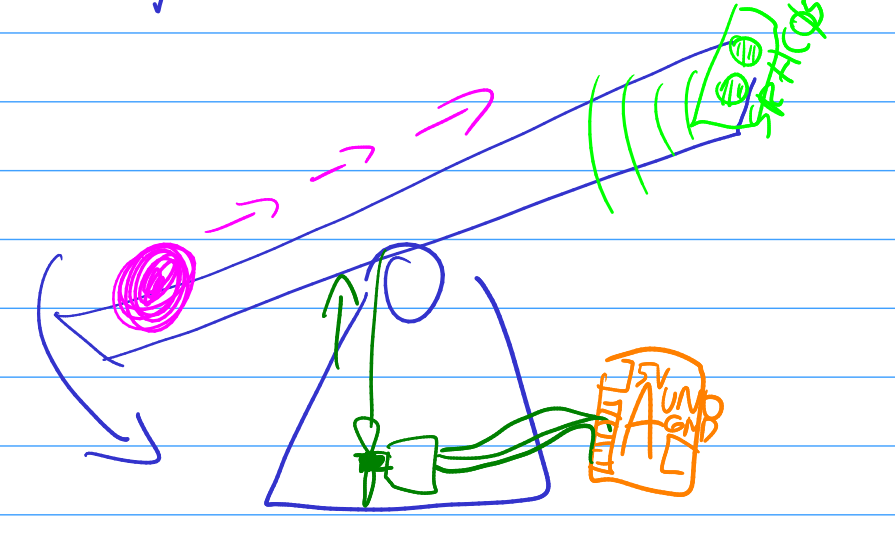
Układ: huśtawka (niebieska), kulka(różowa), silniczek (zielony), Arduino UNO (pomarańczowy).
A tera pierwsze próby jego wykonania „w realu”:
Pierwsza wersja huśtawki.
Jednak wszystko się „buja” 😛 Roboczo wykorzystane trytytki powodują duże luzy w obu osiach, a dalej niejasny jest sposób połączenia orczyka serwa z drugim pierścieniem obejmującym rurę. Coś tu trzeba wymyślić (wydrukować?).
Już wiemy, do czego zmierzamy w tym semestrze – będziemy stabilizować huśtawkę! Projekt bardzo ciekawy i w zasięgu ręki każdego początkującego hobbysty. O co chodzi? Na huśtawce poruszać się będzie kulka (różowa na rysunku poniżej), która zmieniając swoje położenie przechyli huśtawkę w inne położenie. Ale jest też silniczek (zielony), którym będzie sterować Arduino UNO (pomarańczowe) tak, by kulka nie wypadła z huśtawki i pozostawała w środku (położeniu równowagi).
Układ: huśtawka (niebieska), kulka(różowa), silniczek (zielony), Arduino UNO (pomarańczowy).
musimy określać położenie kulki na huśtawce – wykorzystamy poznany tydzień temu czujnik odległości HC-SR04
przechylanie huśtawki: mikroserwo powinno wystarczyć, ale jeśli okaże się za słabe – to mamy też serwa.
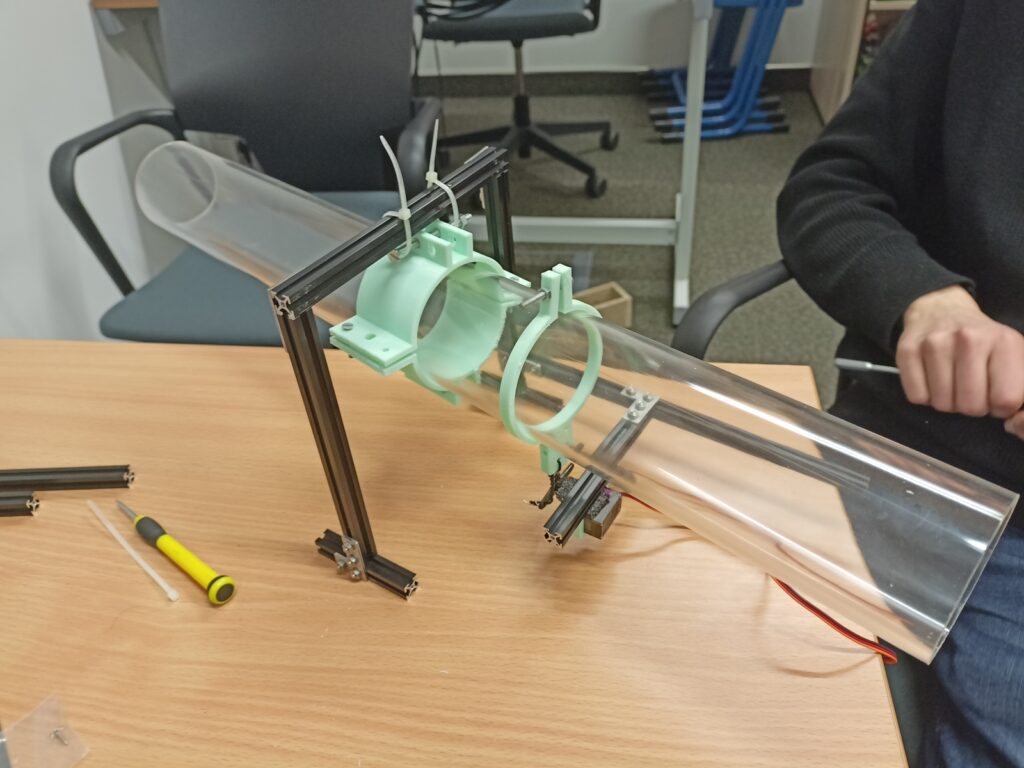
Huśtawka z pleksi rury.
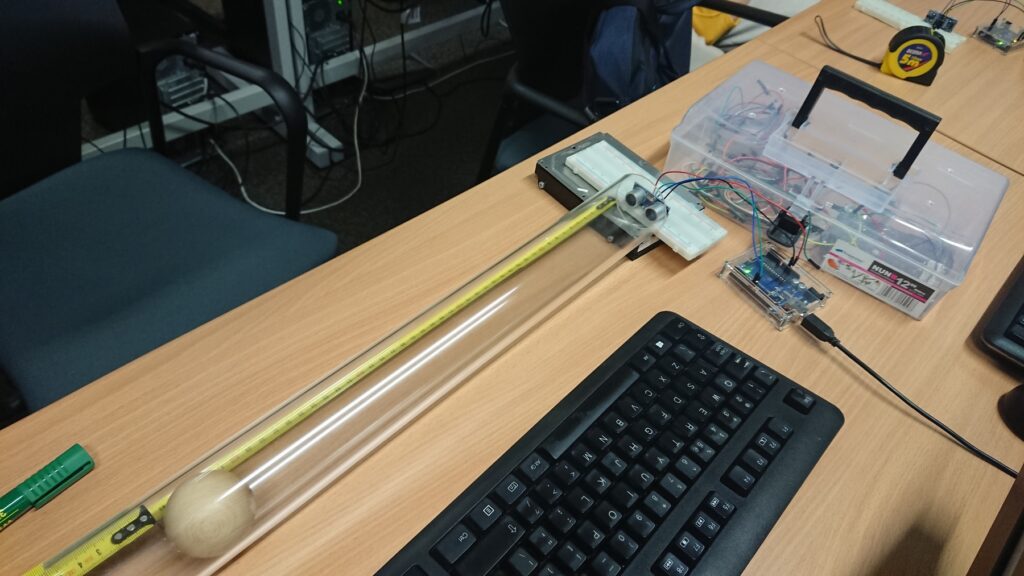
Pan Stanisław tak się zaangażował w projekt, że zakupił już element konstrukcyjny huśtawki – rurę (ładna! długa: 50cm, ale gruba, bo ścianki 3mm, no i droga…). Pomysł fajny, ale czy czujnik odległości na końcu takiej rury będzie dobrze wskazywać pomiary odległości? W końcu emituje on dźwięki, które będą „buszować” w zamkniętej rurze i kolejne pomiary mogą być bezsensowne. Dlatego trzeba było to sprawdzić.
Testowanie czujnika w zamkniętej rurze – działa!
Na nasze szczęście okazało się, że (o dziwo!) czujnik działa poprawnie! Sprawdziliśmy to z wykorzystaniem metrówek.
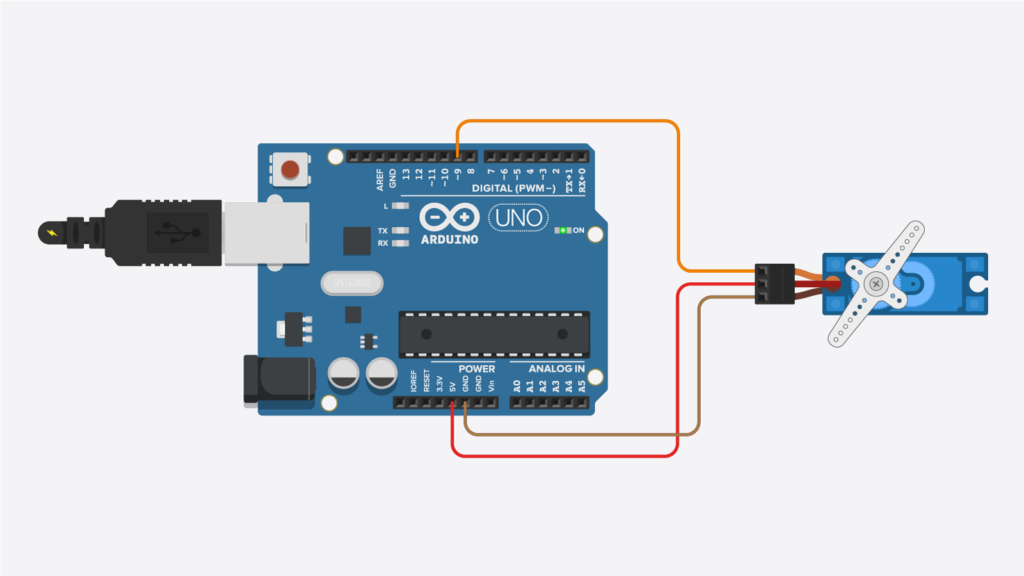
Silniczek – a dokładniej mikro serwo.
Proponuję wykorzystać mikro serwo do poruszania ramieniem huśtawki. Jest to silnik sterowany sygnałem PWM, który możemy ustawić w określonej pozycji: od 0 (zera) do 180 stopni. Do obracającego się orczyka przyczepimy element łączący go z ramieniem huśtawki.
Podłączenie: czarny przewód to GND, czerwony to zasilanie (5V), a pomarańczowy – sterowanie. Obrazek z https://www.makerguides.com/servo-arduino-tutorial/ (polecam zajrzeć).
W tym konkretnym przypadku możemy podłączyć zasilanie serwa bezpośrednio do płytki Arduino UNO, bo pojedyncze serwo pożera jedynie ~200mA prądu (nie możemy przekraczać 500mA, bo uszkodzimy Arduino lub podłączonego z nim kompa – a tego nie chcemy).
Programowanie polega na użyciu biblioteki Servo.h i znajdującego się w niej obiektu Servo. Tworzymy zmienną (u nas silnik) i przypisujemy jej sterowanie do pinu 9 – metoda attach(). Następnie ustawiamy ramię silnika na określoną pozycję – tutaj 5, 90 i 175 stopni – za pomocą metody write(). Celowo pomijam skrajne wartości 0 i 180 stopni, bo to nadwyręża serwa.
Zwracam także uwagę, że po ustawieniu serwa na konkretną wartość należy dać mu czas na realizację tego polecenia – serwa działają powoli! Nasze MG90S obraca się o 60 stopni w 0,1 sekundy – dlatego 2s opóźnienie przed kolejnym ustawieniem to rozsądna wartość.
Budowa konstrukcji.
I tu zaczynają się schody… Trzeba się trochę pobrudzić 😉 Może sklejka lub podobny, miękki materiał – łatwy do obróbki bez zaawansowanego osprzętu? A może wspomniane profile Maker Beam?
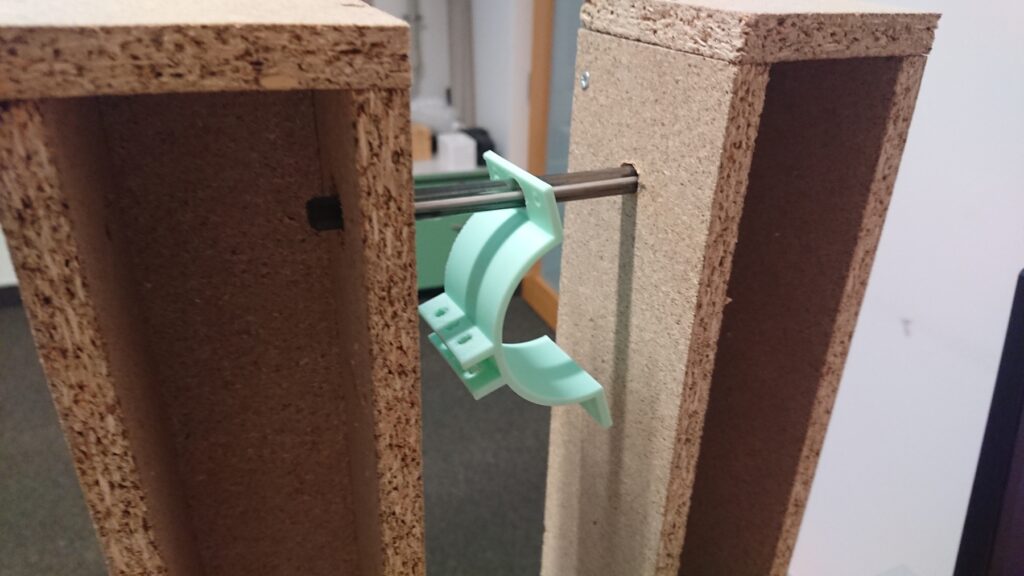
Tymczasowe dwie kolumny z osią pomiędzy, do której przyczepiona jest połowa trzymaka do rury.
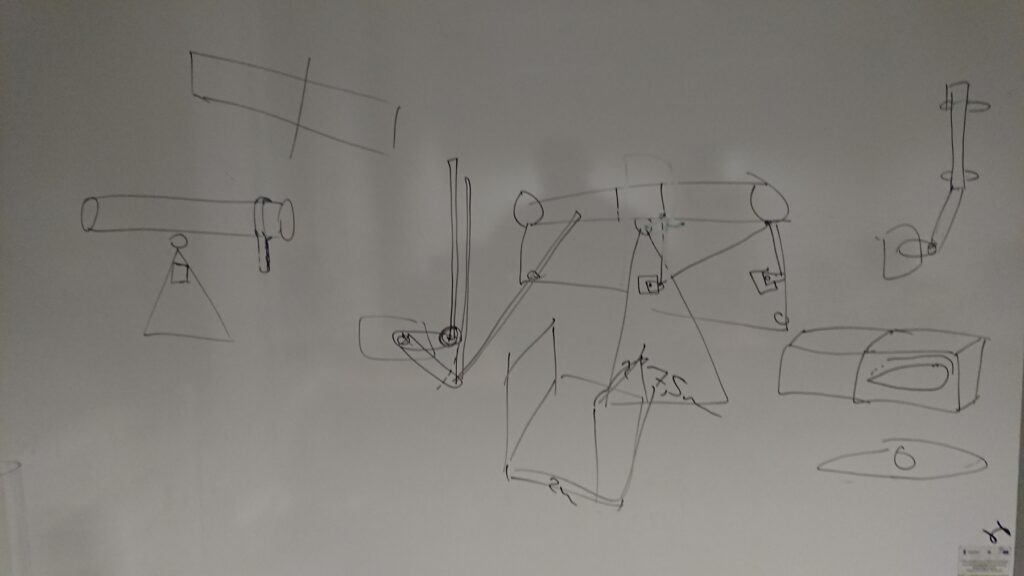
Jeszcze zobaczymy co zrobimy, ale najpierw trzeba przemyśleć połączenie silniczka z ramieniem huśtawki. Są różne koncepcje. Poniżej wynik prac przy tablicy….
Burza mózgów – schematy połączenia silnika z ramieniem huśtawki.
Trzymak do rury.
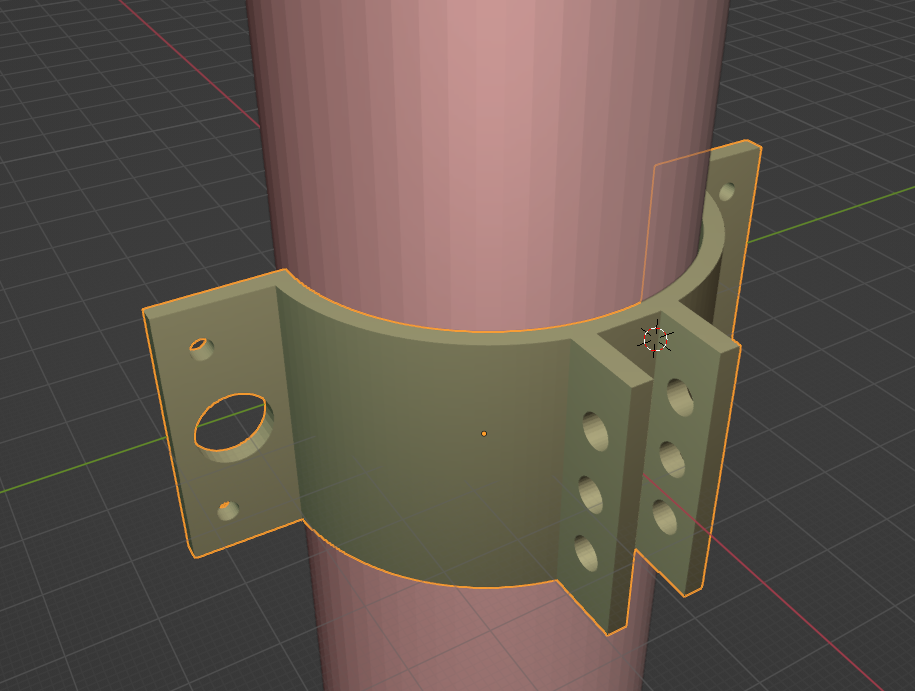
Aby złapać rurę (huśtawkę) i przytwierdzić ją do stabilnej konstrukcji – trzeba mieć odpowiedni uchwyt. Pewnie można poszukać w jakimś popularnym sklepie z materiałami budowlanymi, ale postanowiłem lekko pomóc i zaprojektowałem na szybko taki uchwyt – poniżej zdjęcie jego połówki, bo właśnie dwie takie części tworzą całość. Uchwyt ma sporo nadmiarowych „uniwersalnych” otworów – tak na przyszłość, aby nie tylko pełnił funkcję trzymania rury i obracania jej, ale i mechanizmu połączenia z silniczkiem… Powinno się przydać.
3D model trzymaka – uchwytu (jedna połowa, druga identyczna zamyka całość).
Wydrukowany trzymak w testach – na drewnianej prowadnicy/wierzy.
Jak widać sporo się działo… a to dopiero początek tego projektu 😉
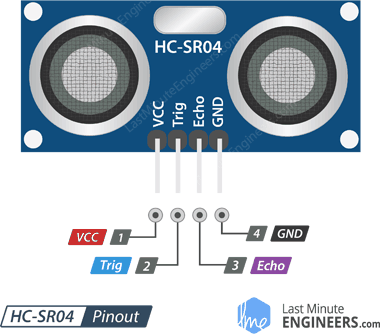
Poznajemy ultradźwiękowy czujnik odległości – układ HC-SR04. Emituje on fale dźwiękowe o częstotliwości 40 kHz (czyli spoza zakresu słyszalności człowieka) i czeka na jej powrót. Mierząc czas nadejścia tej informacji (powrotnej) znamy odległość do obiektu, od którego odbiła się fala dźwiękowa (a właściwie 2x odległość, bo fala pokonała drogę w jedną stronę i z powrotem).
PINOUT: czyli jak podłączyć układ. VCC=5V.
Działanie układu odbywa się zgodnie z następującym protokołem (schematem):
włączamy TRIG (stan wysoki =5V) na 10 us aby uruchomić procedurę wyemitowania dźwięku (8 impulsów 40 kHz);
wyłączamy TRIG (stan niski =0V), pin ECHO przechodzi w stan wysoki i zmieni go na niski, gdy sygnał wróci (a jeśli nie wróci, ECHO zmieni się po czasie 38 ms);
mierzymy czas trwania sygnału wysokiego na pinie ECHO – znając ten czas i zakładając prędkość dźwięku 340 m/s mamy już odległość do obiektu.
Zasada działania czujnika – polecam stronę LAST MINUTE ENGINERING.
Pierwszy programik wykorzystuje funkcję pulseIn() w celu określenia długości trwania sygnału HIGH na pinie ECHO.
Nie jestem wielkim zwolennikiem funkcji pulseIn() – choć działa bardzo dobrze. Do odczytu stanu pinów służy funkcja digitalRead(), którą trzeba tylko odpowiednio „zapętlić” — poniższy kod właśnie to realizuje. Wykorzystujemy też funkcję mierzenia czasu działania Arduino w mikrosekundach (czyli w 1/1000 milisekund!) czyli funkcji micros(). Oto i kod:
#define TRIG 8
#define ECHO 7
unsigned int t1,t2;
byte aaa;
void setup() {
pinMode(TRIG, OUTPUT);
pinMode(ECHO, INPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(TRIG, 0);
delayMicroseconds(5);
digitalWrite(TRIG, 1);
delayMicroseconds(10);
digitalWrite(TRIG, 0);
//czekanie na przelaczenie pinu ECHO w stan HIGH... wszak nic nie dzieje sie natychmiast!
while (digitalRead(ECHO) == LOW);
t1=micros();
while ((aaa=digitalRead(ECHO)) == HIGH);// Serial.println(aaa);
t2=micros()-t1;
Serial.print(t2);
Serial.print(", ");
Serial.print(t2/58.0);
Serial.println(" [cm]");
delay(100);
}
Dwie rzeczy wymagają wyjaśnienia: 1) Pętle while kończą się średnikiem – czyli pętla nie wykonuje nic! od razu wraca do sprawdzenia warunku kontynuowania pętli – tak szybko, jak się da; nie ma strat czasu na wypisywanie rzeczy, na jakieś obliczenia…. 2) czekamy na ustawienie pinu ECHO w stan HIGH tak długo, jak czujnik SR_HC04 to zrobi (bo choć protokół o tym właśnie mówi, to nic nie dzieje się natychmiast – nawet światło ma skończoną prędkość); dlatego pojawiła się pętla trwająca tak długo, aż stan pinu ECHO jest LOW. Po tej pętli mamy pewność, że ECHO jest już HIGH i uruchamiamy „stoper” (zapisujemy aktualną wartość mikrosekund) do zmiennej t1. Teraz ponownie zapętlamy program aż stan pinu ECHO zmieni się na LOW – to sygnalizuje powrót sygnału do układu. Ta pętla posługuje się pomocniczą zmienną aaa (ale beznadziejna nazwa) zapisującą stan pinu ECHO – niby niepotrzebnie, ale można odkomentować następną linię i będziemy widzieć jej wartość. To kolejna mała rzecz wymagająca komentarza. Po tej pętli ponownie zapisujemy „stoper” – czyli aktualną wartość mikrosekund, tworząc zmienną t2 równą różnicy zatrzymanego czasu i wartości t1… Zmienna t2 ma teraz dokładnie takie samo znaczenie jak w pierwszym przykładzie (programie) i dalsza część pozostaje niezmieniona.
Które rozwiązanie lepsze? W przypadku jednego czujnika pewnie pierwsze jest fajniejsze, ale gdy mamy więcej czujek działających jednocześnie? Wówczas rozwiązanie z pulseIn() nie zagra, bo zatrzyma wykonanie programu i nie pozwoli na wykrycie sygnału wracającego do innego czujnika – czyli popsuje wyniki dla drugiego, trzeciego czujnika. Drugie rozwiązanie można łatwo rozbudować do współpracy z wieloma czujnikami (np. wprowadzając zmienne t2, t3, t4… ) mierzące czas powrotu sygnału z kolejnych czujek. Ale nie upieram się nad wyższością jednego nad drugim. Mi bardziej pasuje funkcja digitalRead() i dlatego wolę drugi programik. Warto na koniec wspomnieć, że jest dedykowana biblioteka do obsługi układu SR-HC04 (gdzie? poszukaj!) i wiem, że świetnie nadaje się do obsługi wielu czujników.