Analogowa czujka pola magnetycznego SS49E
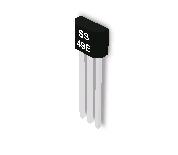 SS49E to bardzo fajny układ do mierzenia wartości pola magnetycznego w zakresie -1500..0..+1500 Gs. Warto zwrócić uwagę, że czujka ta mierzy zarówno „plusy” jak i „minusy”, czyli jest bibolarna – w odróżnieniu od układów unipolarnych (które reagują jedynie na konkretną polaryzację magnesu, czyli tylko biegun N lub tylko biegun S). Wartość zmierzonego pola tłumaczona jest na napięcie na pinie OUT z zakresu od 0.86V do 4.21V w sposób liniowy. Tę liniowość wykorzystamy za chwilę.
SS49E to bardzo fajny układ do mierzenia wartości pola magnetycznego w zakresie -1500..0..+1500 Gs. Warto zwrócić uwagę, że czujka ta mierzy zarówno „plusy” jak i „minusy”, czyli jest bibolarna – w odróżnieniu od układów unipolarnych (które reagują jedynie na konkretną polaryzację magnesu, czyli tylko biegun N lub tylko biegun S). Wartość zmierzonego pola tłumaczona jest na napięcie na pinie OUT z zakresu od 0.86V do 4.21V w sposób liniowy. Tę liniowość wykorzystamy za chwilę.
Analogowa czy cyfrowa?
Jest dużo podobnych układów. Inne czujki (szczególnie te unipolarne) są nazywane switczami (ang. switche) i są cyfrowe. Unipolarność wyjaśniłem wyżej, natomiast cyfrowość oznacza tu, że układy te reagują jedynie na jakąś konkretną wartość pola magnetycznego (wartość progową). I tak w przypadku przekroczenia tego progu czujka zwraca napięcie wysokie, a jeśli próg nie został przekroczony – napięcie niskie. Świetnie to się sprawdza w wielu sytuacjach (inteligentne domy – okno zamknięte/otwarte, lub do mierzenia obrotów wszelakiego rodzaju kół). Przykładem takiej czujki jest TLE4905L. Jest też z reguły o połowę tańsza. Ale nie o niej dziś będzie (wspomnianą pobawimy się na innych zajęciach) – my mamy czujkę analogową. Jak więc jej używać?
Pinologia (aka. podłączenie)
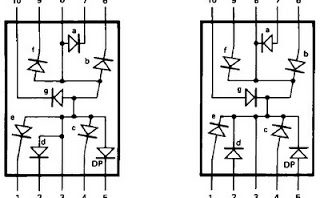
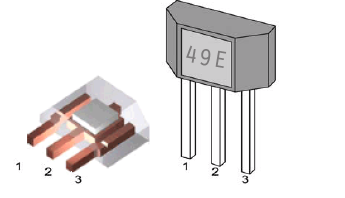
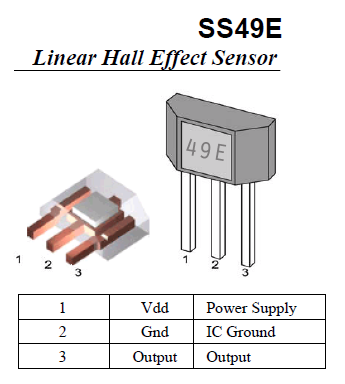
Jak zawsze należy pobrań z internetu notę katalogową (szukamy frazy SS49E datasheet lub podobnie) i przeglądamy całość. Nie musimy wszystkiego rozumieć, zwracamy uwagę na opis ogólny układu i sposób podłączenia. Poniżej zamieszczam wycinek z tego dokumentu:
i już wiemy, która nóżka tego układu co oznacza. Dalej doczytujemy, że napięcie zasilające (Vdd) musi być z przedziału 4-6V, czyli Arduino UNO jak najbardziej się nada. Przy podłączeniu dbamy o odpowiednie ustawienie układu!
Odczyt wartości pola
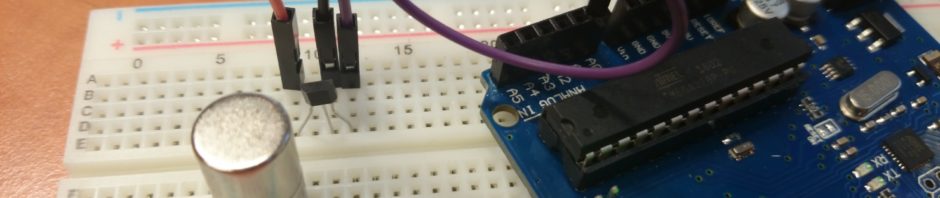
Specyfikacja podaje, że SS49E zwraca wartość 0.86V gdy pole wyosi -1500 Gs, oraz 4.21V gdy pole wynosi +1500 Gs. Jak więc obliczać co wskazuje czujka? Musimy podłączyć układ do zasilania (nóżki 1 i 2) a także nóżkę 3 (nazwaną OUT) do woltomierza (miernika uniwersalnego) lub do Arduino i portu analogowego (np. A0). Oczywiście zachęcam do rozpoczęcia zabawy z miernikiem i magnesem, aby sprawdzić jak to działa. Po tej czynności wracamy do Arduino i podłączamy nóżkę OUT do portu analogowego A0 w Arduino. Potrzebujemy przelicznika.
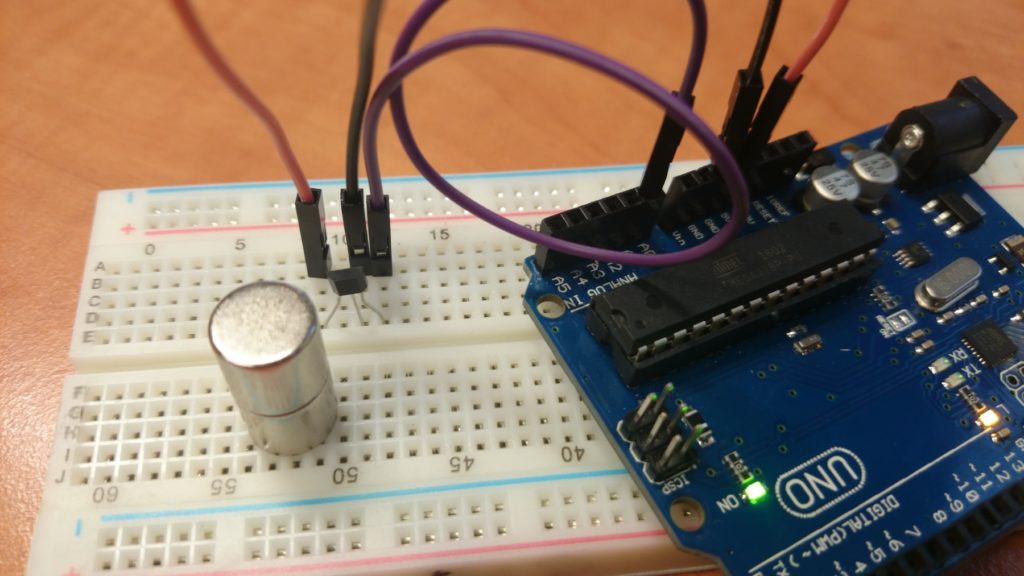
(układ SS49E + Arduino UNO + magnes + płytka stykowa).
Czujka liniowa
Oznacza to, że wartości napięcia z pinu OUT odpowiadają wartościom pola w sposób liniowy, czyli jak funkcja y=a*x+b. Traktujemy więc x jako napięcie z pinu OUT, a y jako wskazywane pole. Dlatego zapisujemy układ równań na nieznane jeszcze współczynniki prostej a i b. Są to:
-1500 = a*0.86 + b (1)
oraz
1500 = a*4.21 + b. (2)
Te dwa równania należy rozwiązać wyznaczając współczynniki prostej a i b a następnie dla każdego odczytanego napięcia z pinu OUT (oznaczmy to x) obliczać natężenie pola według przepisy
y=a*x+b,
gdzie y to właśnie wartość pola.
float a=....;//policz samodzielnie, rozwiązując (1) i (2)
float b=....;//policz samodzielnie
void setup(){
Serial.begin(9600);
}
void loop(){
int odczyt=analogRead(A0);
float x=odczyt*4.56/1023;
Serial.print("napięcie OUT [V] = ");
Serial.print(x);
Serial.print(" ,pole magnetyczne [Gs] = ");
Serial.println(a*x+b);
}
Uwaga
Kluczowe jest odpowiednie odczytanie napięcia z nóżki OUT układu SS49E – bardzo przydatny okaże się woltomierz (multimetr w trybie woltomierza). Zwróć uwagę na program powyżej, gdzie moje Arduino jest już lekko uszkodzone i zamiast książkowych 5V otrzymuję jedynie 4.56V z pinu oznaczonego 5V – dlatego moje przeliczenie odczyt <—> x jest w taki, a nie inny sposób.
Rozdzielczość czujnika
Ze specyfikacji czujnika wynika, że na 1 Gs przypada napięcie 0.001116666 V, czyli 1.116 mV (obliczone jako iloraz 4.21-0.86 — caly zakres napięcia — i liczby 3000 — cały zakres pola, od -1500 do 1500). Natomiast rozdzielczość wejścia analogowego to 4.457 mV na 1 jednostkę w funkcji analogRead (obliczone jako iloraz 4.56 i 1023). Oznacza to, że nie jesteśmy w stanie mierzyć Aruinem tak dokładnie, jak by się chciało, ale tylko z dokładnością plus/minus 4 Gs. Dochodzą do tego jeszcze fluktuacje samego przetwornika analogowo-cyfrowego w Arduino – przyznacie, że widzicie czasami skoki odczytów o plus/minus 1? może nawet 2? Dlatego zmierzona w ten sposób wartość pola to raczej plus/minus 8 Gs.
Ziemskie pole magnetyczne
Na powierzchni Ziemi, bez magnesów i innych zewnętrznych pól powinniśmy otrzymać około 0.5 Gs — z naszą dokładnością każdy wynik <10 Gs jest OK.
Zabawa magnesem
Jak najbardziej! Próbujemy odczyty z obu biegunów magnesu, sprawdzamy zależność od odległości od czujki. W przypadku mocnych magnesów (np. neodymowych) uważamy, aby ich nie zbliżać do mikrokonktrolera Atmega na płytce Arduino — możemy go uszkodzić!
Okazuje się, że w zależności od napięcia zasilania czujka podaj zero pola magnetycznego różnymi wartościami napięcia z pinu OUT — opisane jest to w specyfikacji. Wrócimy do tego zagadnienia później.

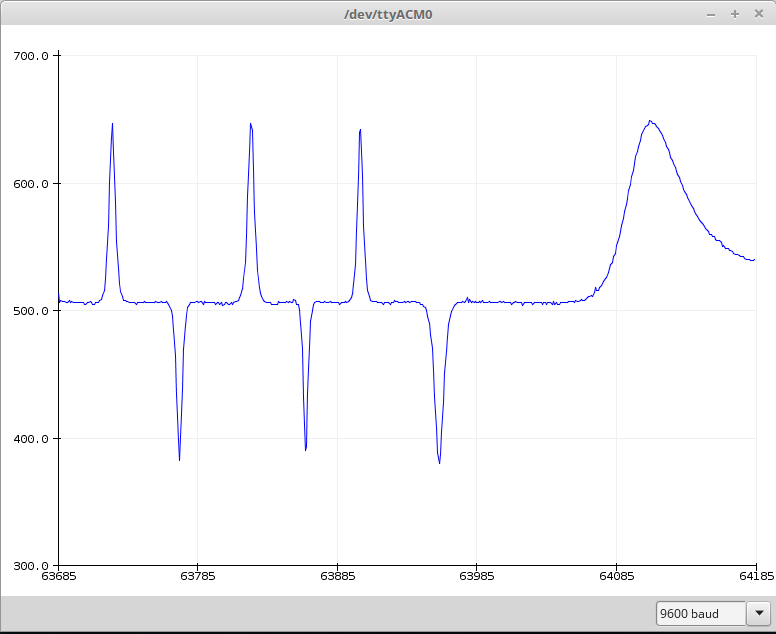
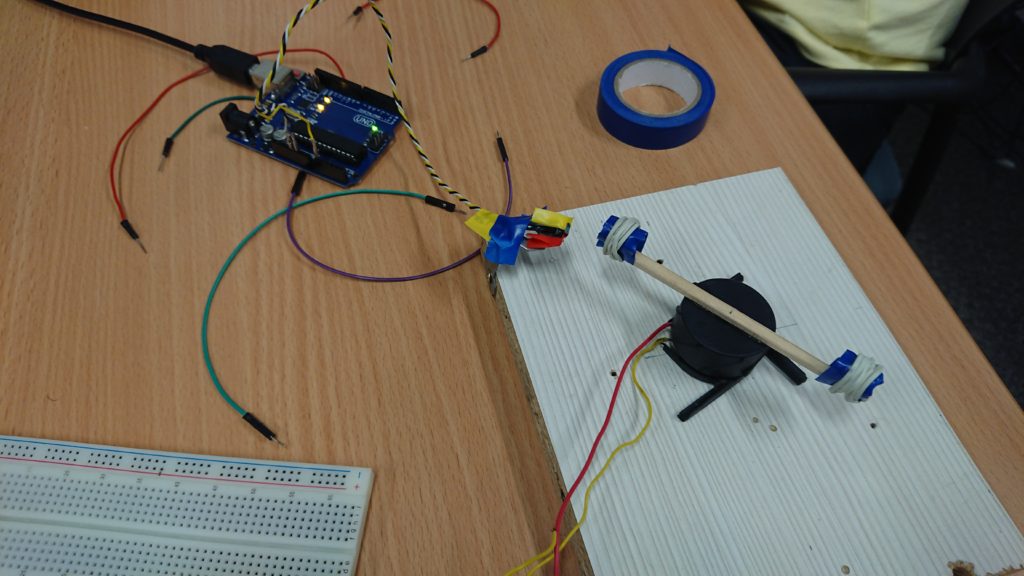
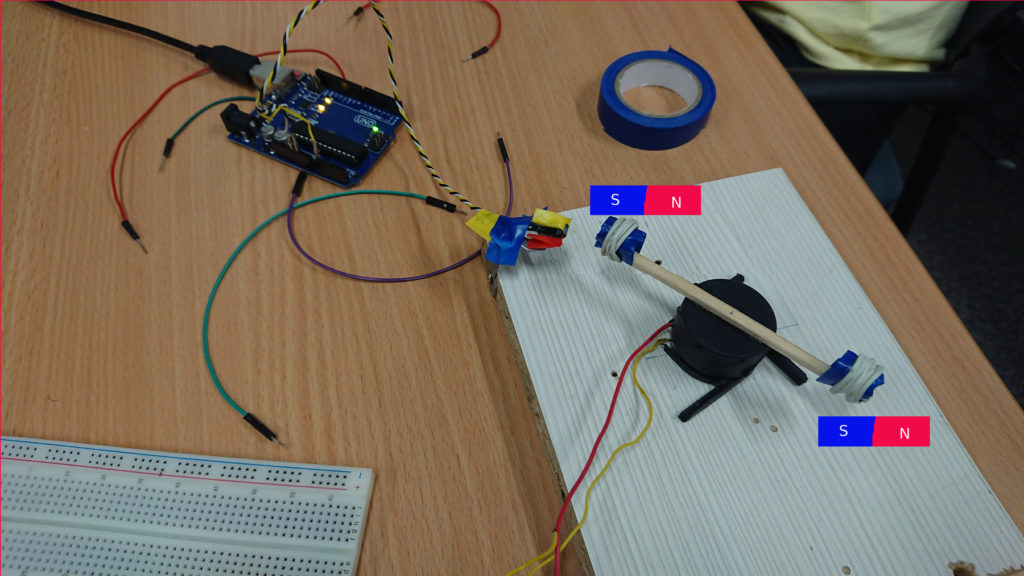 W układzie celowo zamontowano magnesy tak, by czujka SS49E „widziała” raz biegun północny (N) magnesu, a za drugim razem (gdy silniczek obróci sie o 180 stopni) biegun południowy (S). Ustawienie magnesów na końcach patyka nie jest więc przypadkowe 😉 Czujnik SS49E odczytuje zarówno biegun S jak i N (uwaga: nie wszystkie czujki pola magnetycznego, bazującego na efekcie Halla, tak mają – warto to sprawdzić przed zakupejm), dlatego widzimy dwa „piki” podczas obracania silniczka – jeden „do góry” (większe napięcie) oraz „do dołu” (napięcie mniejsze). Z dala od magnesów czujka zwraca napięcie ~2.5V informując, że wartość pola magnetycznego jest (około) zera. Poniżej wykres z Kreślarki
W układzie celowo zamontowano magnesy tak, by czujka SS49E „widziała” raz biegun północny (N) magnesu, a za drugim razem (gdy silniczek obróci sie o 180 stopni) biegun południowy (S). Ustawienie magnesów na końcach patyka nie jest więc przypadkowe 😉 Czujnik SS49E odczytuje zarówno biegun S jak i N (uwaga: nie wszystkie czujki pola magnetycznego, bazującego na efekcie Halla, tak mają – warto to sprawdzić przed zakupejm), dlatego widzimy dwa „piki” podczas obracania silniczka – jeden „do góry” (większe napięcie) oraz „do dołu” (napięcie mniejsze). Z dala od magnesów czujka zwraca napięcie ~2.5V informując, że wartość pola magnetycznego jest (około) zera. Poniżej wykres z Kreślarki
 Program zliczający liczbę obrotów na sekundę (zmienna czas – aktualnie 1000ms, ale można zmienić, także przez krotność – zmienna krok). Algorytm polega na znajdowaniu maksimum i minimum napięcia – a zapisywane jest moment ich wystąpienia (do zmiennych t_1oraz t_2, odpowiednio). Różnica tych czasów do pół obrotu.
Program zliczający liczbę obrotów na sekundę (zmienna czas – aktualnie 1000ms, ale można zmienić, także przez krotność – zmienna krok). Algorytm polega na znajdowaniu maksimum i minimum napięcia – a zapisywane jest moment ich wystąpienia (do zmiennych t_1oraz t_2, odpowiednio). Różnica tych czasów do pół obrotu.
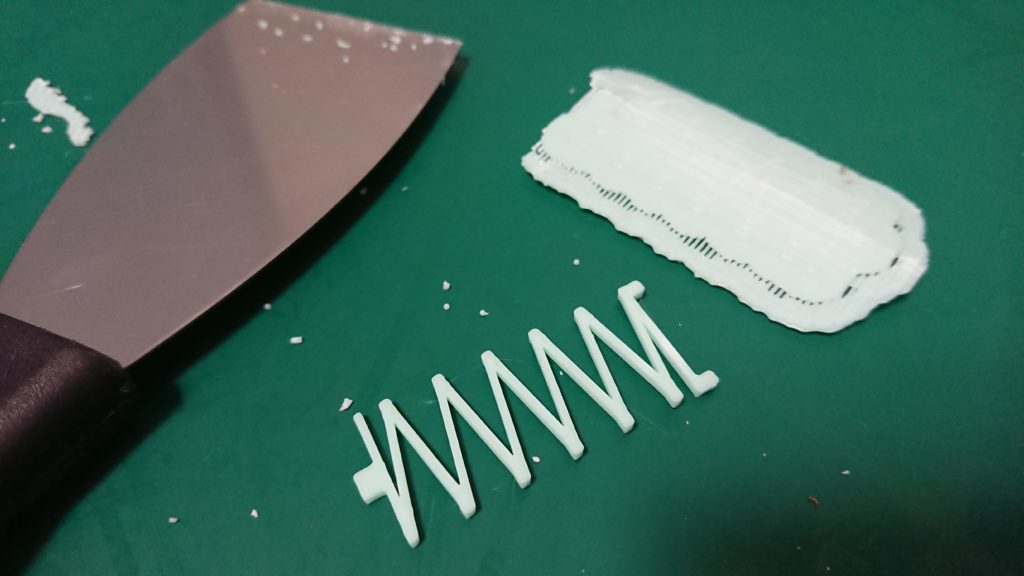
 Nowy model powinien być lepszy – bo wydrukowany z Z-Ultratu:
Nowy model powinien być lepszy – bo wydrukowany z Z-Ultratu:
 No i mamy coraz lepszą pracę Maszyny:
Więcej o projekcie Maszyny na
No i mamy coraz lepszą pracę Maszyny:
Więcej o projekcie Maszyny na 
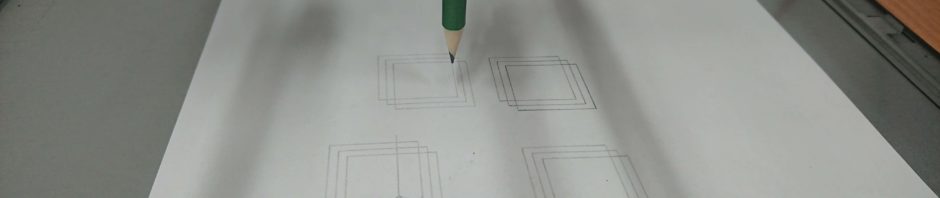
 No i kolejny (próbny) precyzyjny rysunek:
Opis całego proejktu Maszyny pod
No i kolejny (próbny) precyzyjny rysunek:
Opis całego proejktu Maszyny pod 
 A po co nam zliczanie tych obrotów? Zastosowań jest wiele, jednym z nich jest mierzenie prędkości wiatru takim prostym urządzeniem:
A po co nam zliczanie tych obrotów? Zastosowań jest wiele, jednym z nich jest mierzenie prędkości wiatru takim prostym urządzeniem:
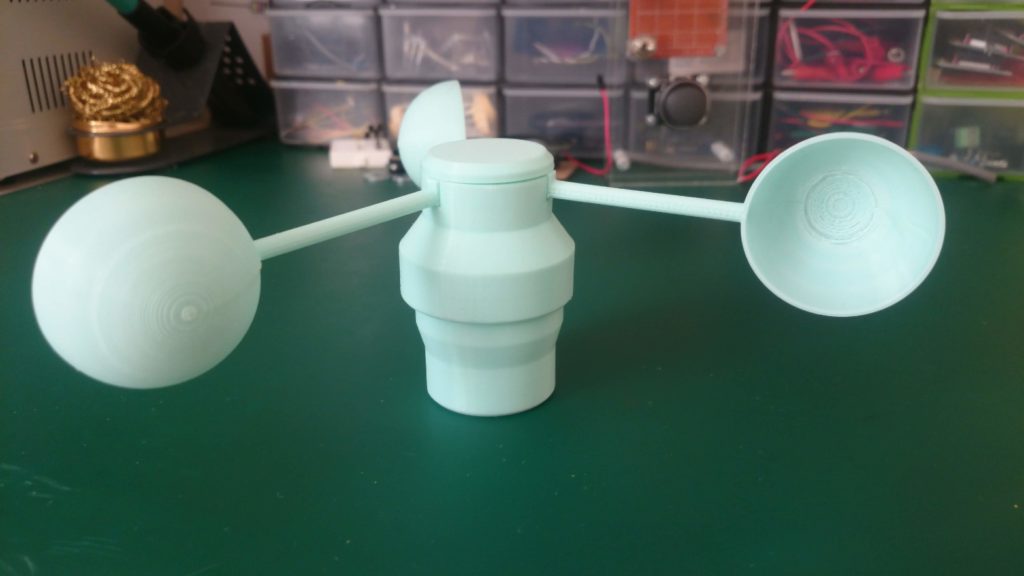 w środku którego znajdują się: czujka SS49E, dwa magnesy oraz łożysko kulkowe (typ 682ZZ).
w środku którego znajdują się: czujka SS49E, dwa magnesy oraz łożysko kulkowe (typ 682ZZ).
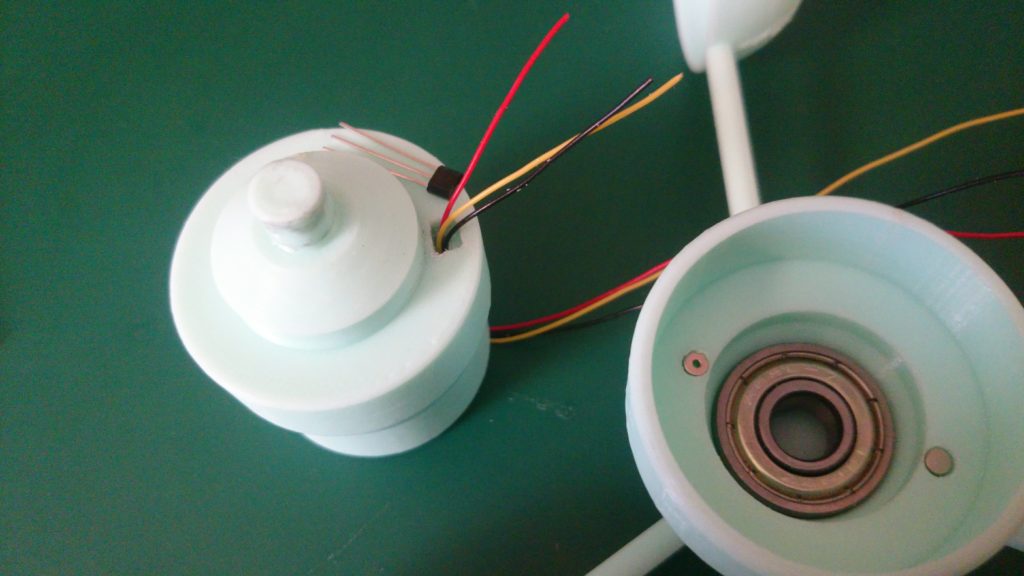 O dalszych losach tego projektu niebawem…
O dalszych losach tego projektu niebawem…
 Właśnie z powodu nowego pomyłu przetestowaliśmy działanie czujki pola magnetycznego SS49E – dziecinnie proste 😉 Podłączamy do zasilania (5V z Arduino UNO) a wyjście #3 do portu analogowego.
Właśnie z powodu nowego pomyłu przetestowaliśmy działanie czujki pola magnetycznego SS49E – dziecinnie proste 😉 Podłączamy do zasilania (5V z Arduino UNO) a wyjście #3 do portu analogowego.
 Odczytywane napięcie z portu analogowego tłumaczymy na wartość pola magnetycznego zgodnie z poniższym rysunkiem (z
Odczytywane napięcie z portu analogowego tłumaczymy na wartość pola magnetycznego zgodnie z poniższym rysunkiem (z  Zaletą tego konretnego czujnika (SS49E) jest możliwość odczytywania pola z obu biegunów magnesu – czyli z biegunu półnonego i południowego. Są bowiem inne czujki, które informują nas jedynie o wartości pola z jednego bieguna, a na pole z przeciwnego bieguna są „głuche”.
Nas nie interesują wartości w mT, a raczej sama informacja zbliżenia do magnesu. No właśnie – przetesowaliśmy kilka małych (i większych) magnesów, w tym neodymowe – bardzo silne. Będzie się działo!
Zaletą tego konretnego czujnika (SS49E) jest możliwość odczytywania pola z obu biegunów magnesu – czyli z biegunu półnonego i południowego. Są bowiem inne czujki, które informują nas jedynie o wartości pola z jednego bieguna, a na pole z przeciwnego bieguna są „głuche”.
Nas nie interesują wartości w mT, a raczej sama informacja zbliżenia do magnesu. No właśnie – przetesowaliśmy kilka małych (i większych) magnesów, w tym neodymowe – bardzo silne. Będzie się działo!