Obroty na minutę: RPM (czujka pola magnetycznego SS49E)
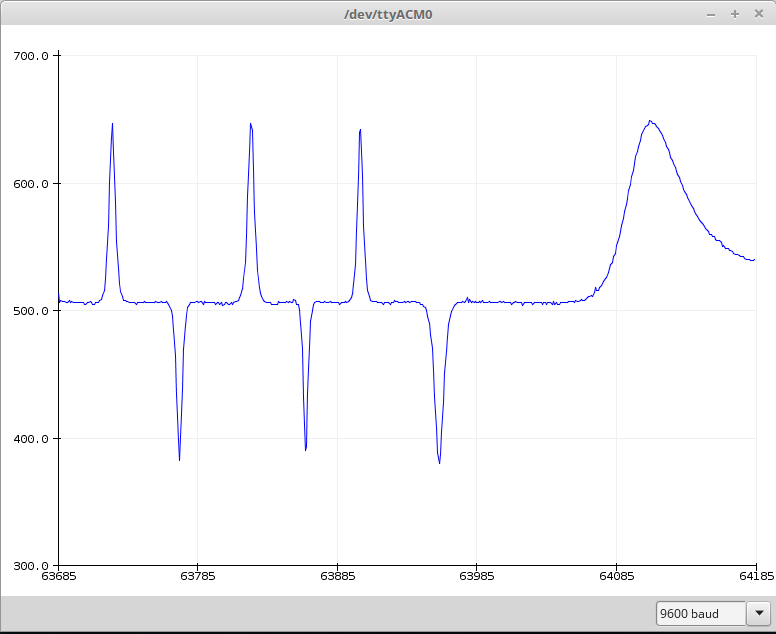
Pan Przemek ukończył kod, który zlicza obroty wirującego silniczka – brawo! Należy się pochwała, bo to jego pierwsze zmagania z Arduino. Układ doświadczalny: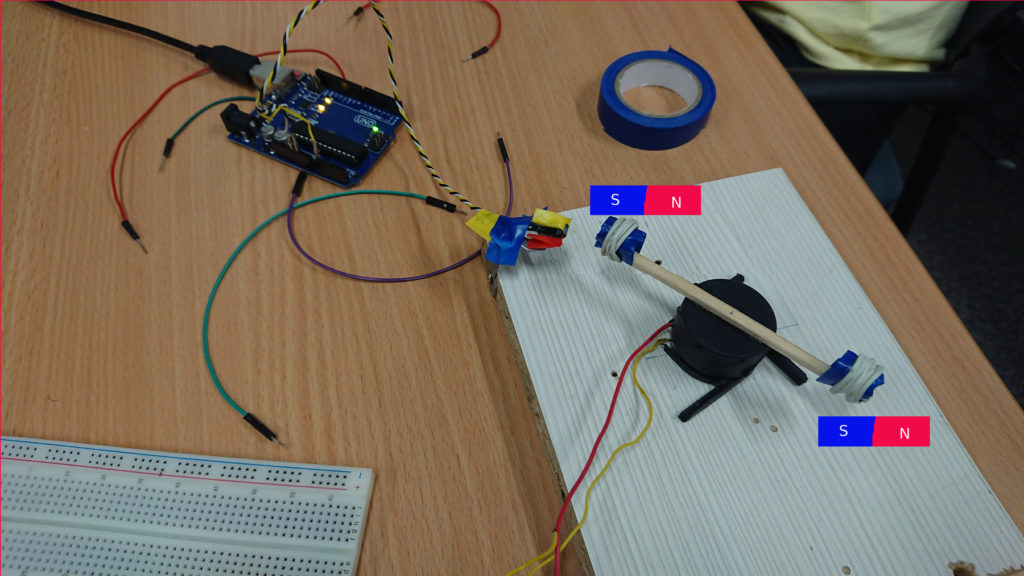 W układzie celowo zamontowano magnesy tak, by czujka SS49E „widziała” raz biegun północny (N) magnesu, a za drugim razem (gdy silniczek obróci sie o 180 stopni) biegun południowy (S). Ustawienie magnesów na końcach patyka nie jest więc przypadkowe 😉 Czujnik SS49E odczytuje zarówno biegun S jak i N (uwaga: nie wszystkie czujki pola magnetycznego, bazującego na efekcie Halla, tak mają – warto to sprawdzić przed zakupejm), dlatego widzimy dwa „piki” podczas obracania silniczka – jeden „do góry” (większe napięcie) oraz „do dołu” (napięcie mniejsze). Z dala od magnesów czujka zwraca napięcie ~2.5V informując, że wartość pola magnetycznego jest (około) zera. Poniżej wykres z Kreślarki
W układzie celowo zamontowano magnesy tak, by czujka SS49E „widziała” raz biegun północny (N) magnesu, a za drugim razem (gdy silniczek obróci sie o 180 stopni) biegun południowy (S). Ustawienie magnesów na końcach patyka nie jest więc przypadkowe 😉 Czujnik SS49E odczytuje zarówno biegun S jak i N (uwaga: nie wszystkie czujki pola magnetycznego, bazującego na efekcie Halla, tak mają – warto to sprawdzić przed zakupejm), dlatego widzimy dwa „piki” podczas obracania silniczka – jeden „do góry” (większe napięcie) oraz „do dołu” (napięcie mniejsze). Z dala od magnesów czujka zwraca napięcie ~2.5V informując, że wartość pola magnetycznego jest (około) zera. Poniżej wykres z Kreślarki
 Program zliczający liczbę obrotów na sekundę (zmienna czas – aktualnie 1000ms, ale można zmienić, także przez krotność – zmienna krok). Algorytm polega na znajdowaniu maksimum i minimum napięcia – a zapisywane jest moment ich wystąpienia (do zmiennych t_1oraz t_2, odpowiednio). Różnica tych czasów do pół obrotu.
Program zliczający liczbę obrotów na sekundę (zmienna czas – aktualnie 1000ms, ale można zmienić, także przez krotność – zmienna krok). Algorytm polega na znajdowaniu maksimum i minimum napięcia – a zapisywane jest moment ich wystąpienia (do zmiennych t_1oraz t_2, odpowiednio). Różnica tych czasów do pół obrotu.
void setup() {
Serial.begin(9600);
}
int i,max_=518,min_=518,a=0,b=0,czas,n=0,krok=1;
float v;
long int t_1=0,t_2=0,t_k=0,t_3=0,t_p;
void loop(){
t_p=millis();
czas=1000;
i=analogRead(A0);
if(i>540){
if(i>max_){
max_=i;
t_1=millis();
}
else if(i<max_){
a=1;
}
}
if(i<490){
if(i<min_){
min_=i;
t_2=millis();
}
else if(i>min_){
b=1;
}
}
if(t_1>t_2){
t_3=t_2;
}
else{
t_3=t_1;
}
if(a==1&&b==1){
t_k=abs(t_2-t_1);
a=0;
b=0;
max_ = 518;
min_ = 518;
if(czas>t_3){
n++;
}
else if(czas<t_3){
Serial.print("Liczba pol-obrotow: ");
Serial.println(n);
n=0;
krok++;
czas=czas*krok;
}
}
}
Zmienna n (małe n) zlicza wystąpienia „półobrotów”, a co ustalony czas wypisywany jest komunikat z tą liczbą. W ten sposób mamy właśnie pół-RPS (revolutions per second), z którego łatwo można już otrzymać RPM (revolutions per minute).
Precyzyjna Maszyna
Sprężynka nie wytrzymała – chyba była zbyt twarda 🙁 Nowy model powinien być lepszy – bo wydrukowany z Z-Ultratu:
Nowy model powinien być lepszy – bo wydrukowany z Z-Ultratu:
 No i mamy coraz lepszą pracę Maszyny:
Więcej o projekcie Maszyny na stronie projektu.
No i mamy coraz lepszą pracę Maszyny:
Więcej o projekcie Maszyny na stronie projektu.
(c) K.G.