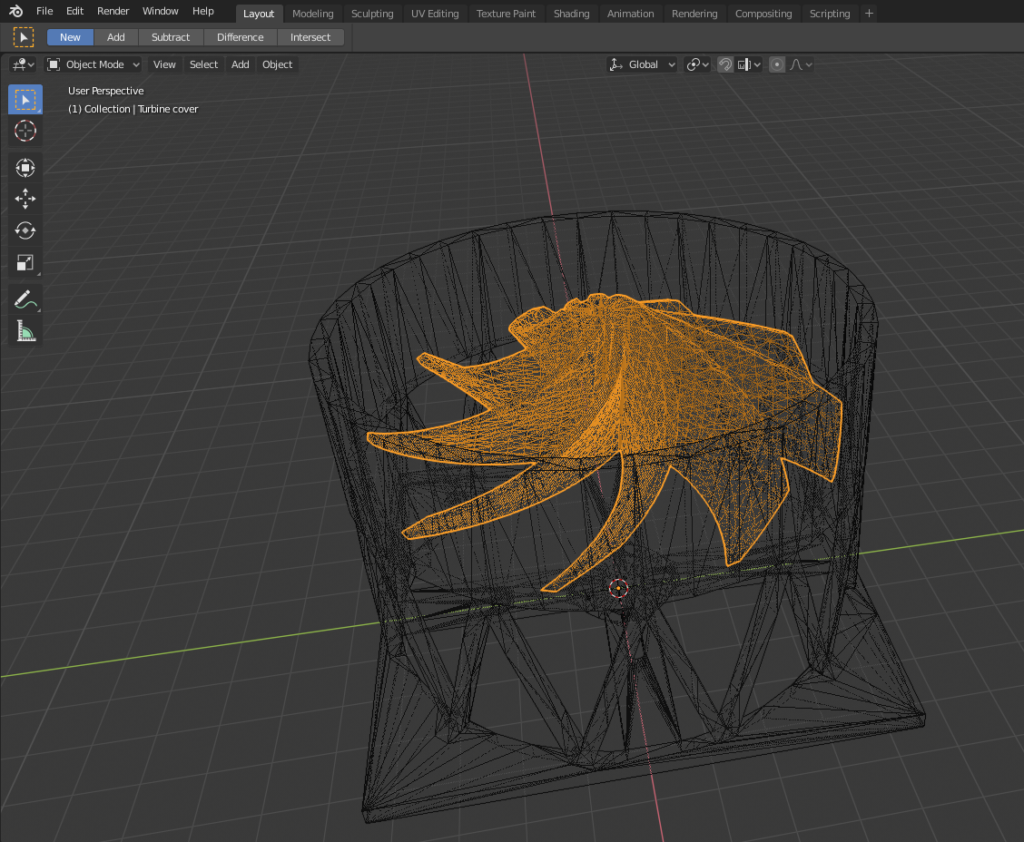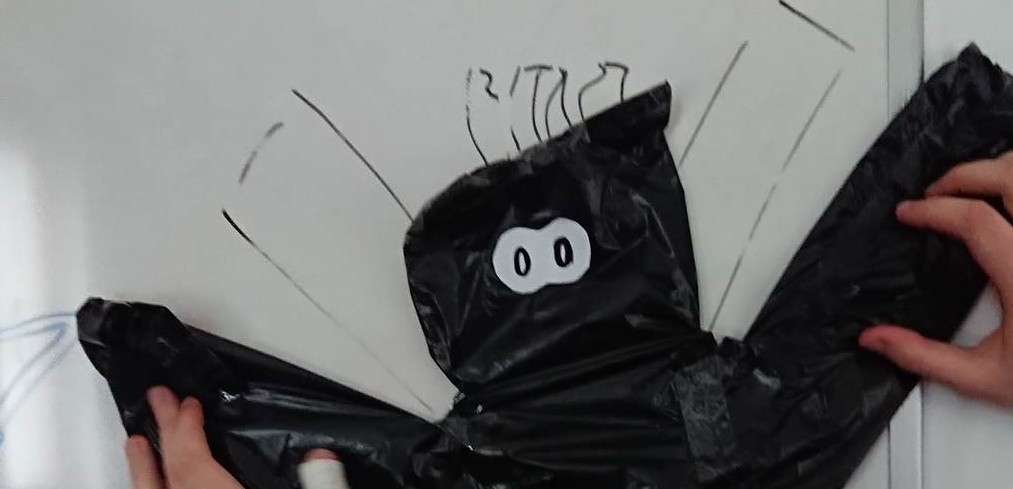
Pan Leszek zaproponował fajny pomysł – zamiast planowanej „głowy” maskotki zrobić w to miejsce ludka nadmuchiwanego powietrzem! Jego uruchomienie, czyli niejako „wyskoczenie” z wnętrza obudowy spowodowało u mnie skojarzenia bajkowego Dżina – i stąd tytuł dzisiejszego wpisu.
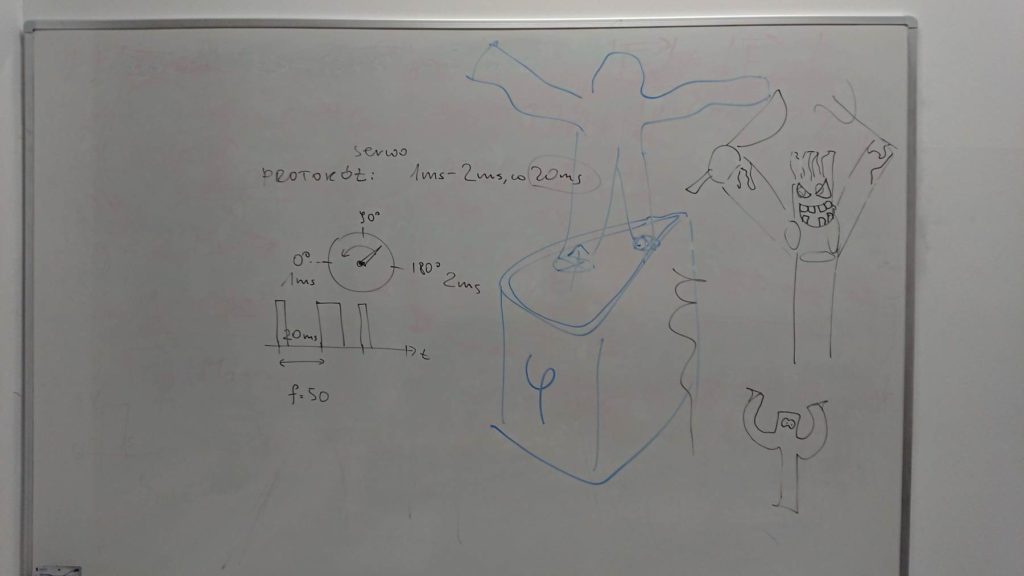
Na naszej balicy powstała pierwsza wersja projektu (kolor niebieski, po lewej stonie poniżych zrzutów-tablic :D), która szybko z opcji dwunożnej przeewoluowała do jednonożnej (prawy zrzut-tablicy, kolor czarny) – jako łatwiszej w realizacji, a może i ciekwszej?


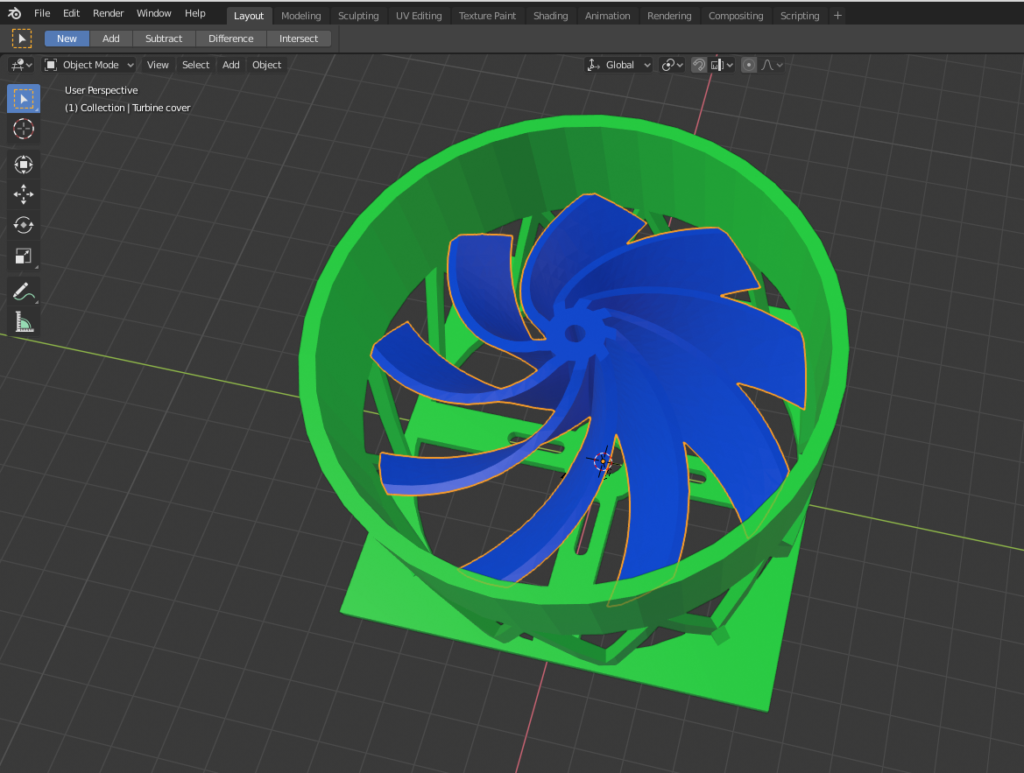
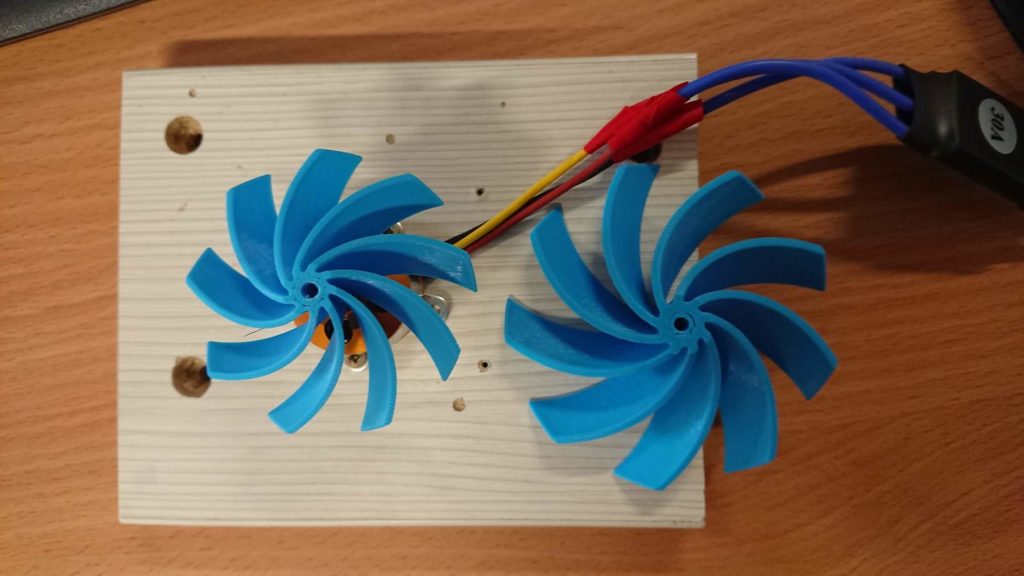
Niby wszystko wydawało się proste: bierzemy jakiś materiał, lekki i wytrzymały (padło na worki na śmieci), tniemy i łączymy (taśma izolacyjna), potem wiatraczek do nadmuchania (na początku ten z obudowy PC-ta, taki jak w zasilaczach komputerowych) i będzie super. No i nie było.


Okazało się bowiem, że takie wiatraczki (typowo: 12V, 0.2A) są zdecydowanie za słabe aby napompować naszego Stefana – a aktualny projekt to maleństwo w stosunku do docelowego Dżina – 1m wysokości? czemu nie!

Po prostu podmuch wiatru generowany przez takie wiatraczki był za słaby. Znalazłem coś lepszego (z komputera Fujitsu) co powodowało kilkakrotnie większy podmuch – ale tylko lekko polepszyło sprawę. Jak rozwiązać ten problem? Dwie kwestie: 1) lepszy silnik, lub 2) zmniejszenie wagi naszego ludka (lub oba na raz).
Zmniejszenie wagi ludka okazało się proste do wykonania (choć pracochłonne). Podczas pomiarów na precyzyjnej wadze jubilerskiej okazało się, że waga izolki klejącej jedną rękę jest równa wadze samej ręki! Dlatego zwykła taśma klejąca (przezroczysta) to lepszy pomysł. JEDNAK to za mało. Może w przyszłości należy kleić na klej? na gorąco (żelazkiem)? Trzeba o tym pomyśleć.
Ciąg powietrza: ciągle zbyt mały.
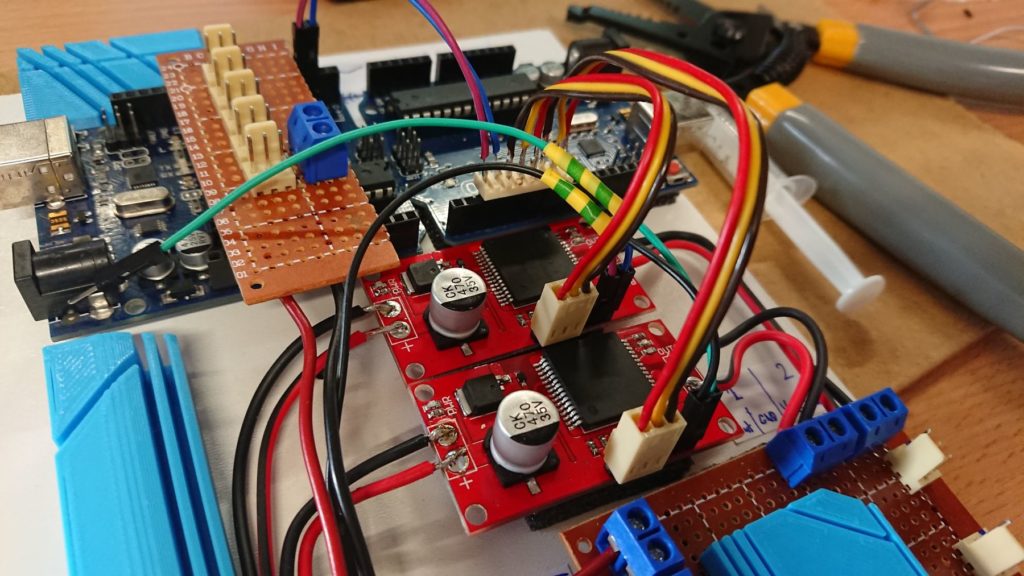
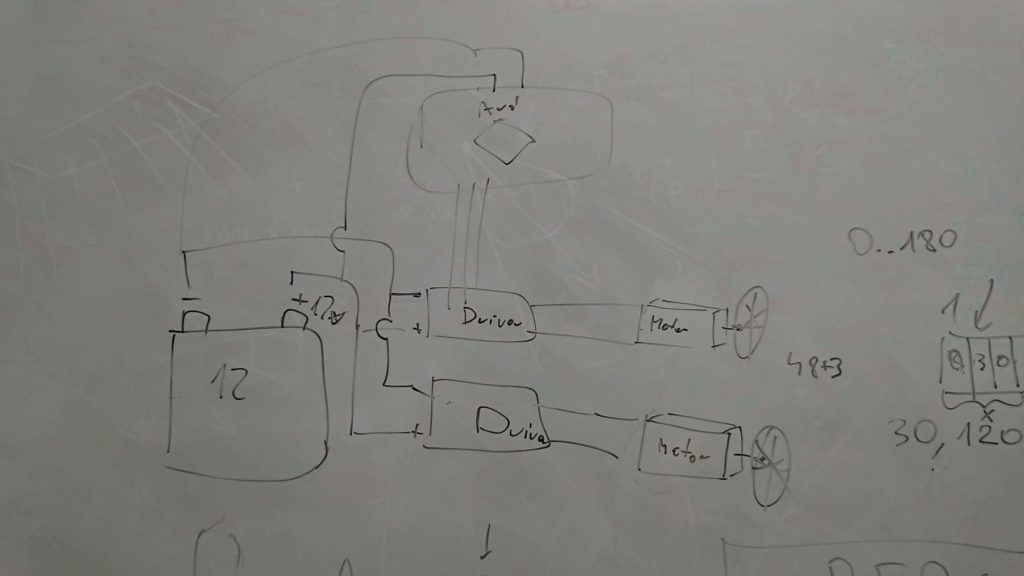
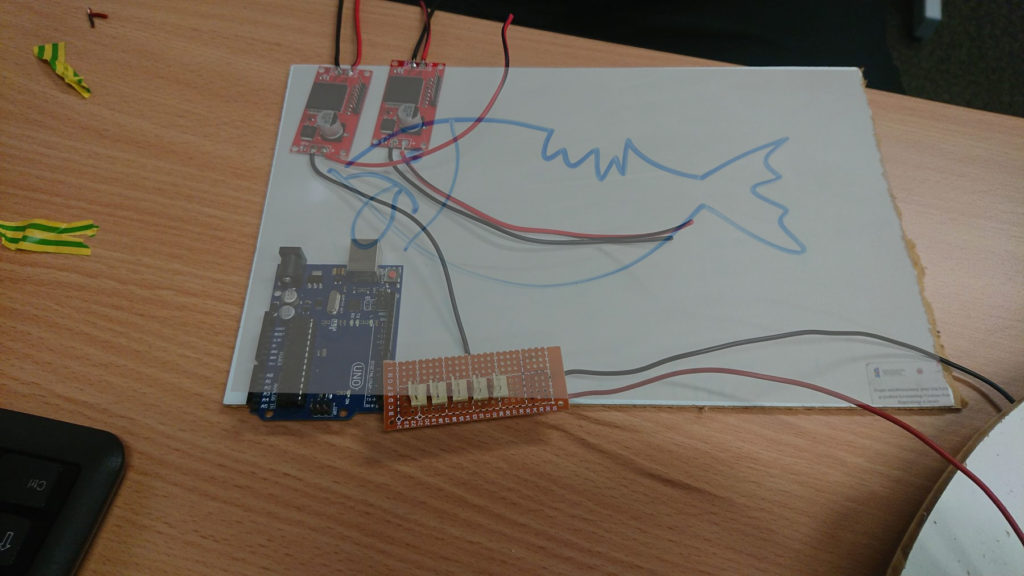
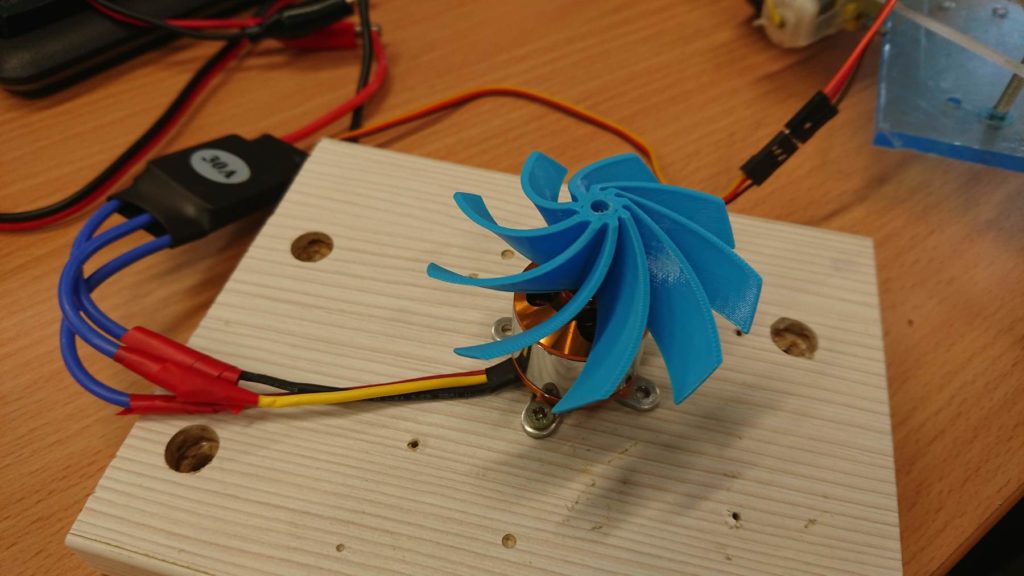
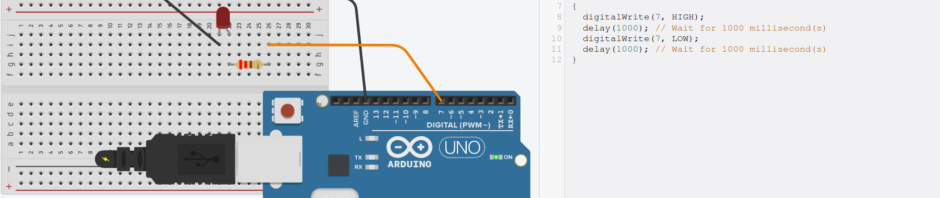
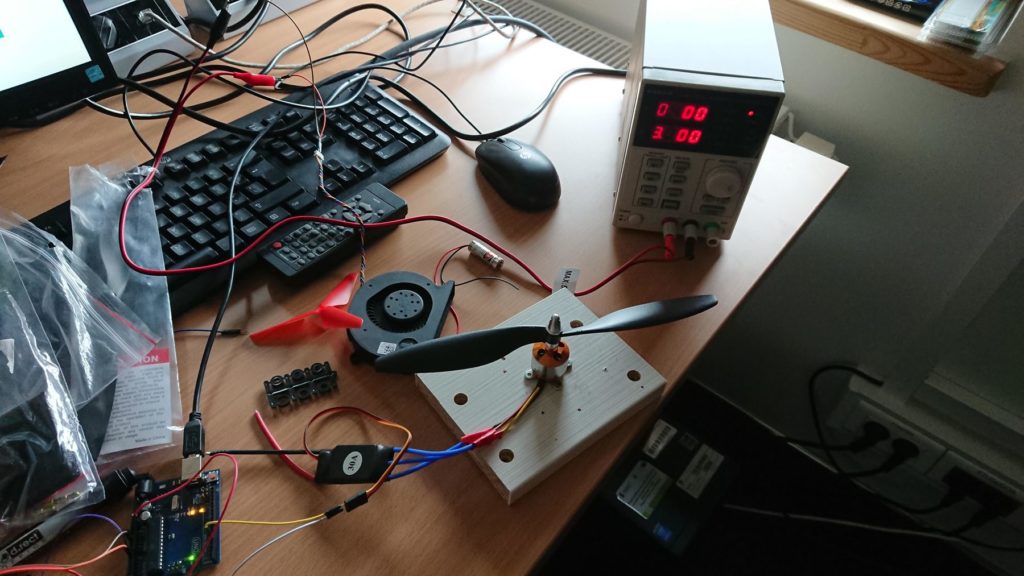
Dlatego zaproponowałem silnik od dronów XXD A2212 1400KV 2-3S (ciąg 830g) z mocnym, 30A regulatorem prędkości ESC (Electronic Speed Control). Przy tej okazji przedstawiłem sposób działania tego regulatora – protokół sterujący dokładnie taki sam jak serwo silniczki! Sterujemy więc sygnałem 50Hz z wypełnieniem 1ms (0% mocy) do 2ms (100% mocy). Nasz zasilacz ustawiony na max 3A prądu był i tak niewykorzystany w całości – przy tych wielkich śmigłach odważyłem się dać jedyni 20% mocy, a i tak deseczka z silniczkiem podskakiwała 😉
Teoretycznie mamy więc rozwiązane problematyczne kwestie – teraz tylko czas na zakup niezbędnych podzespołów i ich montaż. Podsumowując:
- Ludek z worków to dobry pomysł (materiał mocny).
- Klejenie lub prasowanie żelazkiem połączeń – konieczne.
- Ciąg powietrza z silnika bezszczotkowego sterowanego ESC.
- Pomysł na Stefana: jedna noga dwie ręce? a może 5 rąk? a może grecka litera fi? xi? chi? kappa? 😀
- Bardziej demoniczna twarz naszego Dżina? rekwizyty w rękach? Pojawiła się Pani Karolina, może ona coś wymyśli 😉
Tablica na koniec zajęć
Gratuluję twórczej pracy i zapraszam na kolejne spotkanie za tydzień!
(c) K.G. 2019