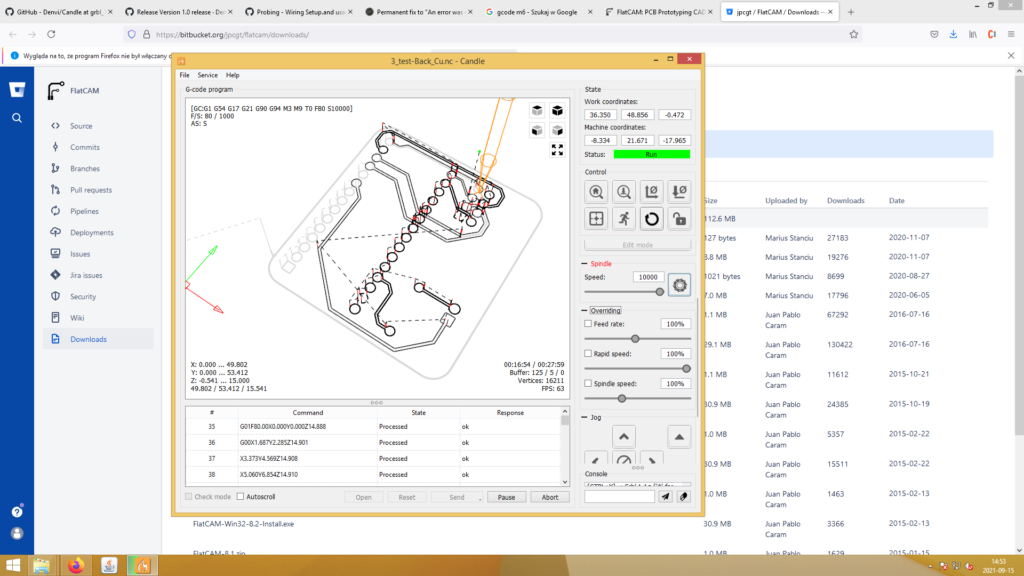
Dziś Pan Bartek testował wydziałową frezarkę CNC w zastosowaniu do przygotowania płytek PCB. Najpierw przygotował projekt pierwszej płytki w KiCad-dzie, który składa się z Arduino Nano + moduł nRF24L + LED + rezystor (polecamy filmik na YT z tutorialem jak pracować w KiCadzie). Dalej wczytał wyeksportowany plik do GRBL-u w Candle i podłączył frezarkę. Candle to fajny program, intuicyjny i pomimo dość skomplikowanie wyglądającego interfejsu – da się zrozumieć o co w nim chodzi. Jedyny minus to to, że jest 32-bitowy: dlatego uruchomiliśmy go pod Windowsem, który wspiera prehistoryczne aplikacje 🙂 W międzyczasie zająłem się wersją na Linuxa (na końcu wpisu wersja 64 bit do pobrania). Aby nie tracić czasu sterowanie frezarką odbywało się z Windowsa.
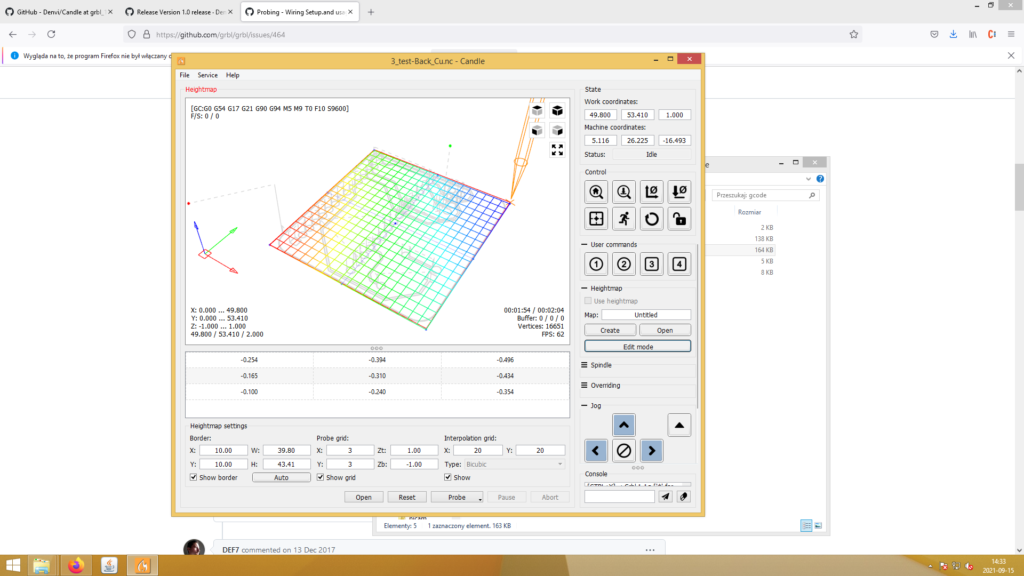
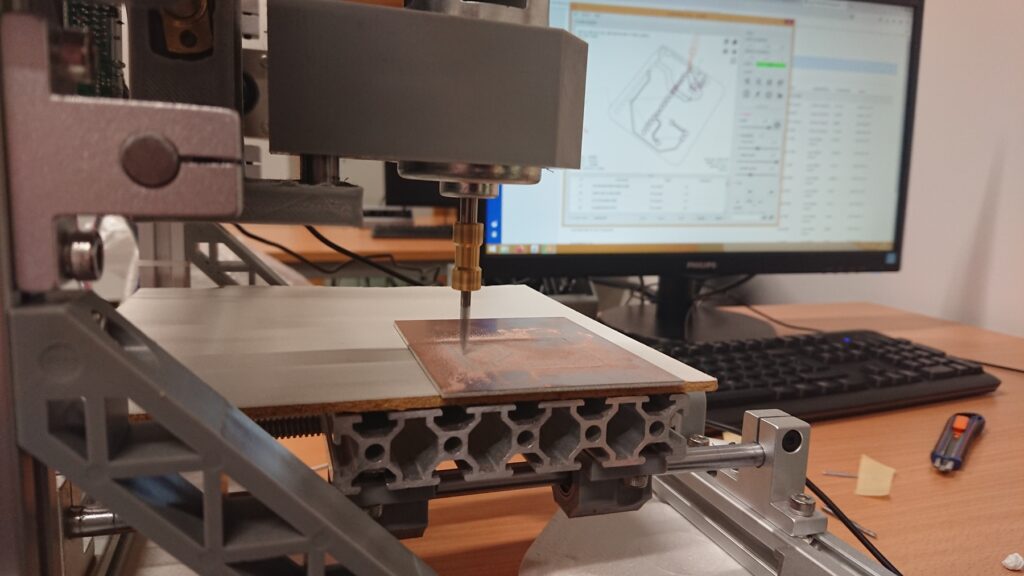
Konfiguracja frezarki polegała na poprawnym podłączeniu, zdefiniowaniu pozycji startowej (punkt 0,0, czyli „dom”), stworzenie mapy wysokości (skanowanie kierunku na osi Z). Chwilowo używamy dwustronnej taśmy przylepnej, niebawem będzie coś odpowiedniejszego.
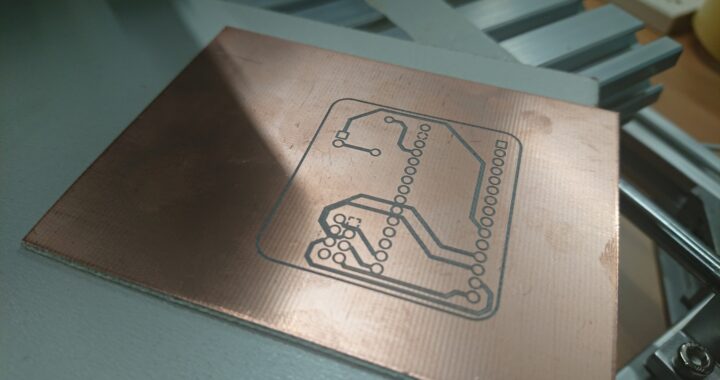
Efekt końcowy po 30 minutach pracy (no i po wyczyszczeniu płytki z opiłków):
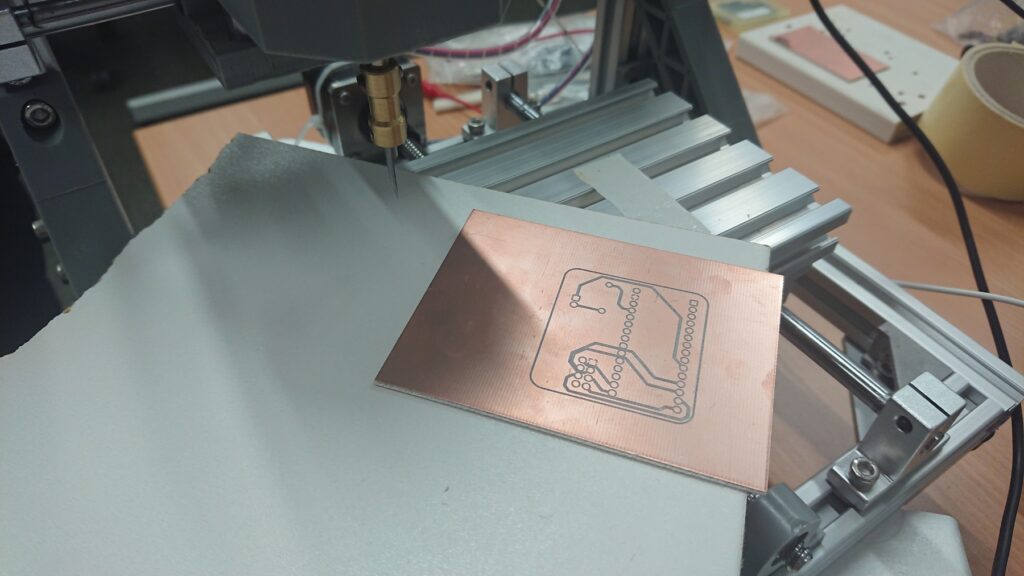
Ciągle jest jeszcze sporo pracy przed ostatecznym przygotowaniem płytki (np. wywiercenie otworów). Jak na razie cieszymy się, że wszystko zadziałało (nawet pomimo tymczasowego mocowania stołu i płytki – na taśmę dwustronną). Niestety, ścieżki są miejscami połączone, ale to wina a) mocowania stołu, b) luzach na głowicy frezującej lub c) złego zdefiniowania parametrów frezu w Candle. Projekt do poprawki, ale i tak jesteśmy zadowoleni 😉
Candle 64-bit
Jak wspomniałem na początku wpisu, z repozytorium githuba pobiera się archaiczną wersję 32-bitową (niezależnie czy Win czy Linux). Windows zawsze był przestarzały więc obsługę aplikacji 32-bitowych ma wszyte w system, pomimo faktu, że jest systemem operacyjnym 64-bitowym. Dla Linuxa (oczywiście 64-bitowego) musiałem zainstalować pakiet ia32-libs aby umożliwić działanie starych programów. Na szczęscie nie trzeba się męczyć w ten sposób. Można przekompilować źródła i mieć własną wersję 64-bit. Dla dystrybucji bazująych na Ubuntu (czyli np. Ubuntu, Mint) należy mieć zainstalowane biblioteki QT5 (patrz krok 0), pobrać źródła (krok 1), wykonać konfigurację i kompilację (krok 2) a potem pobrać wersję v1.1, rozpakować (krok 3) i podmienić plik wykonywalny 32-bitowy Candle na właśnie skompiowany plik 64-bitowy (krok 4). Poniżej kilka instrukcji z poszczególnymi krokami.
(krok 0 - biblioteki)
sudo apt install qt5-default qt5-qmake libqt5serialport5-dev
(krok 1 - źródła)
cd
git clone http://github.com/Denvi/Candle.git
Klonowanie do „Candle”...
warning: przekierowanie do https://github.com/Denvi/Candle.git/
remote: Enumerating objects: 5618, done.
remote: Counting objects: 100% (55/55), done.
remote: Compressing objects: 100% (37/37), done.
remote: Total 5618 (delta 29), reused 36 (delta 18), pack-reused 5563
Pobieranie obiektów: 100% (5618/5618), 35.47 MiB | 5.36 MiB/s, gotowe.
Rozwiązywanie delt: 100% (4166/4166), gotowe.
(krok 2 - konfiguracja)
cd ~/Candle/src/
qmake
make
(krok 3 - binarki 32-bit)
wget http://github.com/Denvi/Candle/releases/download/v1.1/Candle_1.1.7.tar.gz
sudo tar -xf Candle_1.1.7.tar.gz -C /opt/
(krok 4 - podmiana na 64-bit)
cd /opt/Candle
sudo mv Candle Candle.32bit.old
sudo cp ~/Candle/src/Candle .
(krop 5 - sprawdzenie)
file Candle
Candle: ELF 64-bit LSB shared object, x86-64, version 1 (SYSV), dynamically linked, interpreter /lib64/ld-linux-x86-64.so.2, BuildID[sha1]=e1cb49635ed9370e88b3744ca76c0990403ad2b0, for GNU/Linux 3.2.0, not strippedDla leniwych wykonywalny Candle (wersja 64-bit) do pobrania tutaj (md5sum: dbcade0a80bc555d4ec3cbaba9105852).
(c) K.G. 2021