Wojny robotów
Pan Rafał przygotowuje drugi pojazd do pracy + coś tam programuje ze sterowaniem… Pewnie w następnym tygodniu zobaczymy efekty tej pracy. Porównamy też sklepowe koła z naszymi – wydrukowanymi w 3D.
Prędkość serw
Pan Tomasz wykorzystał swój układ mierzący liczbę obrotów na minutę do zbadania zależności zmiany tej prędkości od wypełnienia sygnału sterującego serwem. Serwem pracy ciągłej sterujemy podając sygnał PWM z wypełnieniem z przedziału 1000-2000 us (metoda writeMicroseconds() z klasy Servo), gdzie wartość 1500 us odpowiada zatrzymaniu serwa, a wartości 1500-2000 przekładają się na coraz szybsze obroty serwa w jedną stronę (1500-1000 us w przypadku obrotów w przeciwną stronę). Tyle teorii. A praktyka?
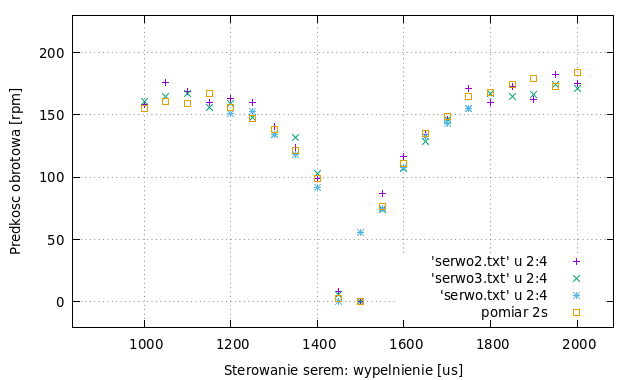
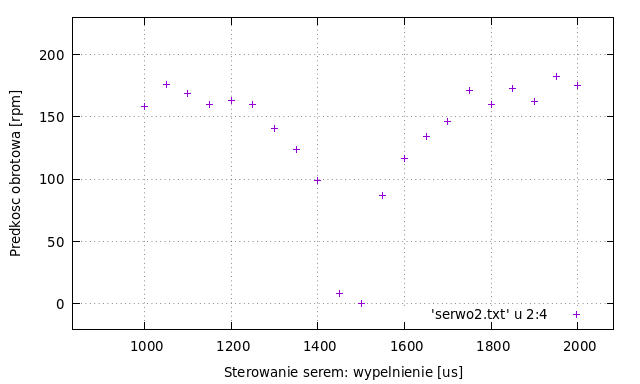
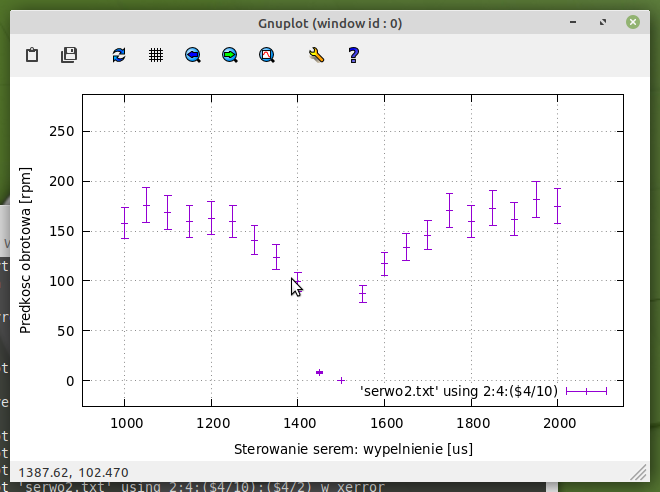
No właśnie – serwo serwu nie równe, a tanie serwa dlatego są właśnie tanie, bo nie trzymają się ściśle tym teoretycznym wymogom. Okazuje się, że pozycja STOP jest „gdzieś w okolicy” sygnału 1500. Obroty w prawo i w lewo też nie są równe – pomimo równego odejścia od pozycji STOP. Na poniższym wykresie widać, że odejście wypełnieniem PWM o 100 us skutkuje prędkością 117 rmp (wartość 1600 us) oraz 99 rpm (wartość 1400 us). Wykres nie jest idealnie symetryczny względem osi x=1500.
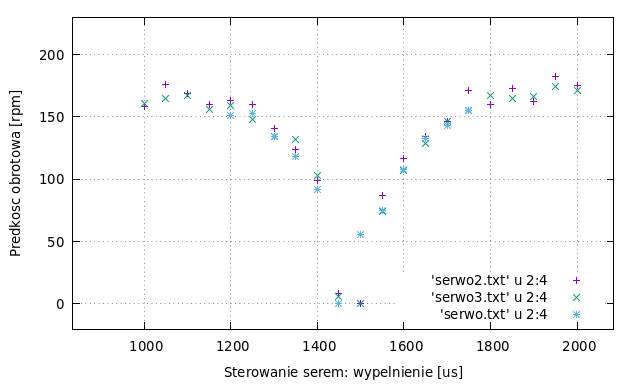
Oczywiście jeden pomiar to za mało, więc procedura została powtórzona dla kolejnych przebiegów, a wyniki zapisane w kolejnych plikach tekstowych. Wniosek – rezultaty są powtarzalne.
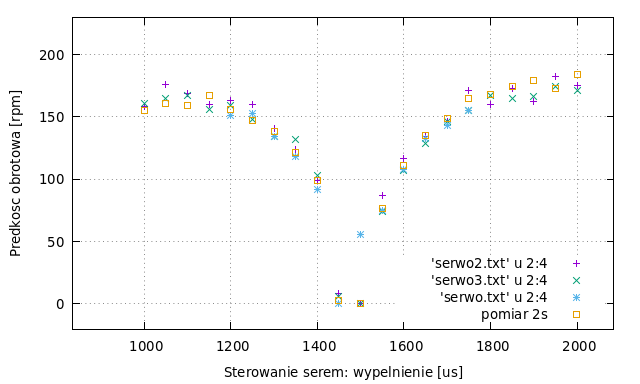
Mając więcej pomiarów, można policzyć odchylenie standardowe i dodać słupki błędów… ale nie przesadzajmy 😉 Dla pewności pomiarów jeden raz dwukrotnie zwiększyliśmy czas zliczania prędkości (czyli dla każdej wartości wypełnienia czekamy 2s i zliczamy impulsy) – wyniki są zgodne.
Wnioski:
1) prędkość nie rośnie liniowo ze zmianą wypełnienia sygnału sterującego,
2) STOP dla serwa jest „gdzieś” w okolicach 1500 us, ale drobna zmiana sygnału może już poruszyć serwo w jednym kierunku, podczas gdy ta sama wartość wypełnienia nie wystarczy by ruszyć serwo w przeciwnym kierunku,
3) prędkość nasyca się około ~200 us wartości skrajnych (1000-1200 us -> prawie jedna wartość prędkości, tak samo jak 1800-2000 us),
4) ruch w lewo i prawo nie jest symetryczny.
Dalsze prace:
Można kontynuować sprawę testowania serw, poddając tym samym próbom inny egzemplarz tego samego serwa – aby przekonać się, czy widoczne tu zachowanie jest typowe dla każdego serwa, czy jednak trafiło się nam wyjątkowy egzemplarz a inne są inne.
gnuplot
Do stworzenia wykresów „na szybko” wykorzystałem program gnuplot – świetny w takich sytuacjach (wykresy na szybko, dane z numeryki, dane z Arduino). „Surowe” dane wypisywane w oknie Monitora porta szeregowego wyglądały następująco:
Servo: 1200 Predkosc: 163.00 Servo: 1250 Predkosc: 160.00 Servo: 1300 Predkosc: 141.00 Servo: 1350 Predkosc: 124.00 Servo: 1400 Predkosc: 99.00 Servo: 1450 Predkosc: 8.00 Servo: 1500 Predkosc: 0.00 Servo: 1550 Predkosc: 87.00 Servo: 1600 Predkosc: 177.00 Servo: 1650 Predkosc: 134.00
Wystarczy przekopiować te dane do pliku tekstowego (np. serwo.txt) a następnie uruchomić gnuplot i wydać polecenie wykresu danych z pliku:
- plot 'serwo.txt’ using 2:4
Polecenie to każe wykorzystać plik 'serwo.txt’ oraz kolumnę 2 dla x-ów, kolumnę 4 dla wartości y-ków. Jak widać nie trzeba kopiować danych do arkusza kalkulacyjnego, usuwać niepotrzebne napisy (tutaj: „Servo:”, „Predkosc:”) czy też tworzyć wykres z zaznaczonych tam komórek. Wystarczy posłużyć się prostą komendą plot podając kolumny do wykorzystania (dyrektywa using).
Gnuplot ma bardzo dużo możliwości – ale tutaj wspomnę tylko o słupkach błędów – gdyby były gdzieś w pliku, np. w siódmej kolumnie, to by wystarczyło wpisać następujące polecenie do ich wyświetlenia:
plot 'serwo2.txt’ using 2:4:7 with yerror
ale cóż – my nie mamy siódmej kolumny… zamiast tego niech wykreślone będą 10% błędy, czyli ponownie wykorzystamy czwartą kolumnę, dzieląc ją przez 10:
plot 'serwo2.txt’ using 2:4:($4/10) with yerror
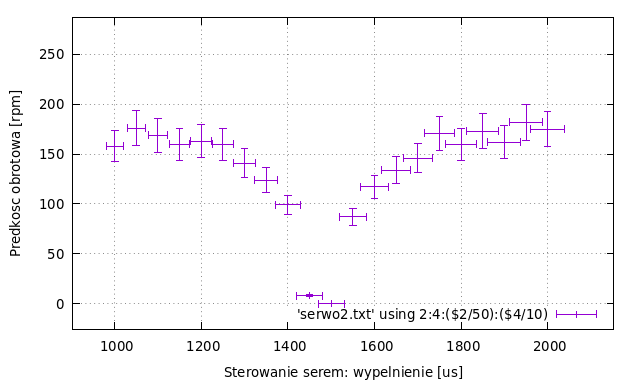
A może słupki na osi x i y? czemu nie!
plot 'serwo2.txt’ using 2:4:($2/50):($4/10) with xyerror
No i powstała dygresja o gnuplocie… 😉
(c) K.G. 2021