Pan Bartek po raz kolejny udowadnia, że połączenie processinga z programowaniem elektroniki daje świetne wyniki! 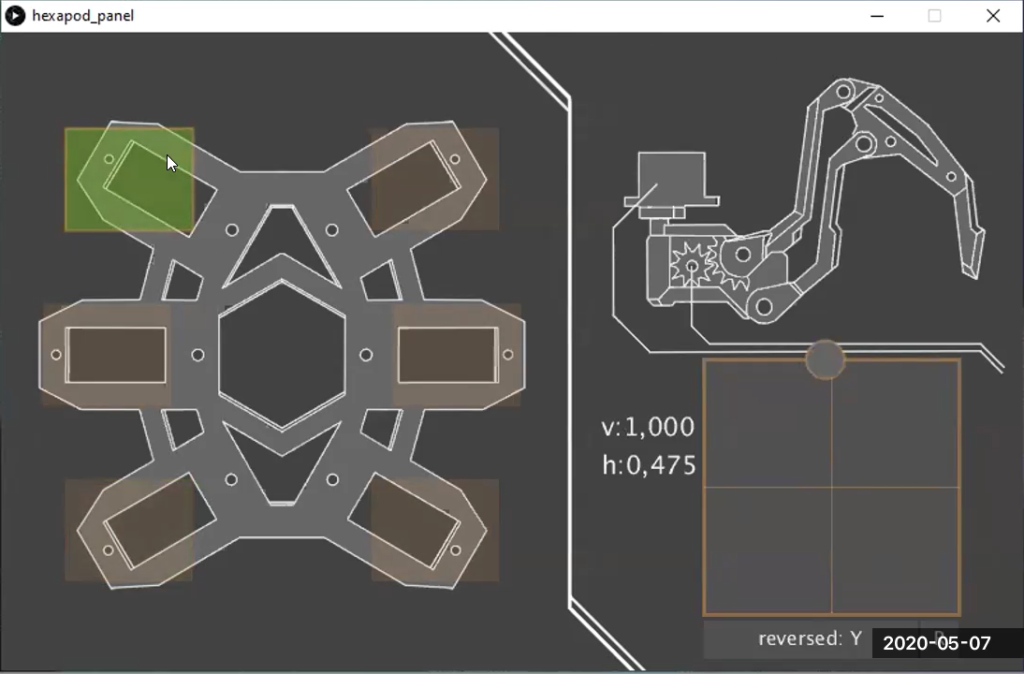 Powyżej widzimy panel konstruktorski do sterowania nogami heXapoda. W lewej części ekranu myszką wybieramy jedną z 6-ciu nóg (podświetli się na zielonkawy kolor) a następnie zmieniamy jej położenie w prawej części (myszą zmieniając położenie kulki w kwadracie). Ustawione w ten sposób położenie (współrzędne v,h) zostają przeliczone na odpowiednie nastawy serwomechanizmów w wybranej nodze. Więcej na stronie projektu.
Powyżej widzimy panel konstruktorski do sterowania nogami heXapoda. W lewej części ekranu myszką wybieramy jedną z 6-ciu nóg (podświetli się na zielonkawy kolor) a następnie zmieniamy jej położenie w prawej części (myszą zmieniając położenie kulki w kwadracie). Ustawione w ten sposób położenie (współrzędne v,h) zostają przeliczone na odpowiednie nastawy serwomechanizmów w wybranej nodze. Więcej na stronie projektu.
Łódź podwodna?
Pan Łukasz obejrzał filmik na YT i zafascynował się konstrukcją łodzi podwodnej. I bardzo dobrze! Tak jak artyści (np. malarze) odwiedzają galerie sztuki, chodzą na wernisaże czy wystawy tak i my powinniśmy oglądać ciekawostki i czerpać z nich inspirację. Poniżej wspomniany filmik
Jak widać konstrukcja jest bardzo pomysłowa – wykorzystuje rzeczy „spod ręki”, a elektronika bazuje na zestawie Lego. My mamy drukarki 3D i Arduino, więc kto wie, co z tego wyjdzie – zachęcam Pana Łukasza do realizacji projektu!
KG (c) 2020, zajęcia w formie e-spotkania