TSOP2236 + IRLib + L298N
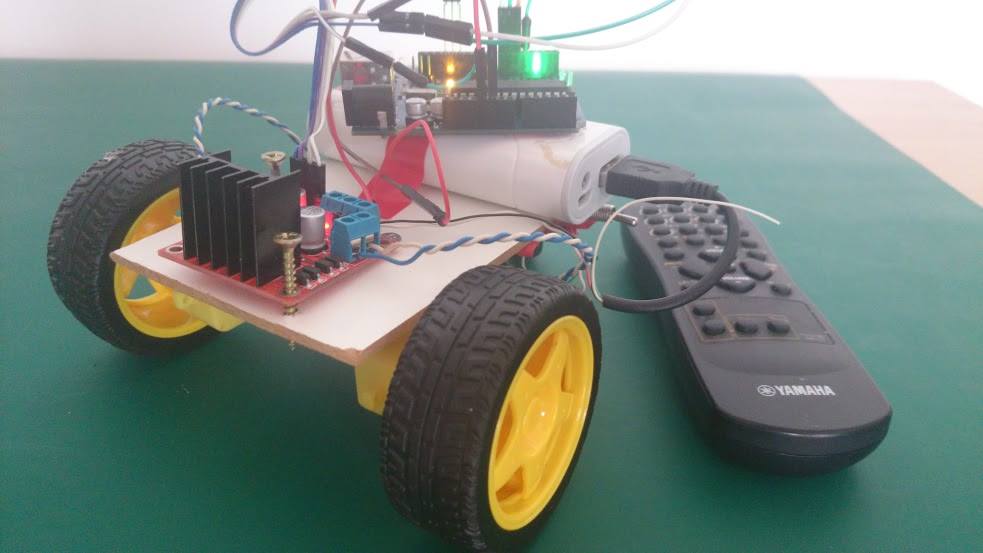
 Dziś już bez problemu oprogramowaliśmy ruch do przodu, do tyłu i dwa typu zakręcania – w miejscu (koła naprzemiennie), oraz szeroki-łuk (jedno koło stop, drugie skręca).
Dziś już bez problemu oprogramowaliśmy ruch do przodu, do tyłu i dwa typu zakręcania – w miejscu (koła naprzemiennie), oraz szeroki-łuk (jedno koło stop, drugie skręca).
Co pozostaje? Jeszcze 1) PWM , 2) omijanie przeszkód oraz 3) sztuczna inteligencja – w końcu do tego dążymy!