Warto poczytać: https://www.arduino.cc/en/Reference/AttachInterrupt
oraz zapamiętać:
| Płytka |
Piny cyfrowe pod które możemy podpiąć przerwania |
| Uno, Nano, Mini, other 328-based |
2, 3 |
| Mega, Mega2560, MegaADK |
2, 3, 18, 19, 20, 21 |
| Micro, Leonardo, other 32u4-based |
0, 1, 2, 3, 7 |
| Zero |
wszystkie, za wyjątkiem 4 |
| MKR1000 Rev.1 0 |
0, 1, 4, 5, 6, 7, 8, 9, A1, A2 |
| Due |
wszystkie |
oraz ,,zdarzenia”, podczas których uaktywni się funkcja przypisana pod dane przerwanie: LOW, CHANGE, RISING, FALLING (HIGH – tylko płytka Due). Krótko: funkcja „podpięta” do przerwania wywoła się wówczas, gdy na tym pinie (tym = zdefiniowanym podczas attachInterrupt) zajdzie konkretne „zdarzenie”, np. LOW. Oczywiście taka funkcja ma być szybka: ustalenie flagi, sterowanie napięciem na pinach – digitalWrite – ale nie delay(ileś-tam).
Przykład: Arduino + przycisk do błyskania diodą #13. Hardware: przycisk (mikroswicz podłączamy do GND a drugą nóżką do pinu #2 w Arduino).
#define PIN 2
bool stan=false;
void setup() {
pinMode(13, OUTPUT);
digitalWrite(13, 0);
pinMode(PIN, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(PIN), blysk, LOW);
}
void loop() {
delay(10000);
}
void blysk(){
stan=!stan;
digitalWrite(13, stan);
}
Gdy nic nie wiemy o przerwaniach, to przyglądając się funkcji loop() można by powiedzieć, że program NIC NIE ROBI! Tylko czeka 10s, a potem znowu czeka 10s, i tak w kółko… Więc skąd się bierze błyskanie diody #13 w momencie klikania przycisku? Otóż wywołanie delay() zatrzymuje działanie programu, ale przerwania ciągle działają. Skoro więc „podpięliśmy” naszą funkcję (o nazwie blysk()) do przerwania, to właśnie ona się wywoła (gdy stan pinu #2 zmieni się na LOW – to wszystko zostało powiedziane w funkcji setup()). Właśnie taki mechanizm wykorzystałem do wykrycia kolizji przez zderzak naszego pojazdu – pisałem o tym w poprzednim poście. UWAGA: powyższy program działa dość dynamicznie, „nerwowo” reagując na wciśnięcie przycisku – oczywiście jest to zjawisko drgania styków (ang. bouncing), o czym mówiliśmy na naszych poprzednich spotkaniach (tutaj, dla przejrzystości kodu nic z tym nie robię, brak jest debouncing-u).
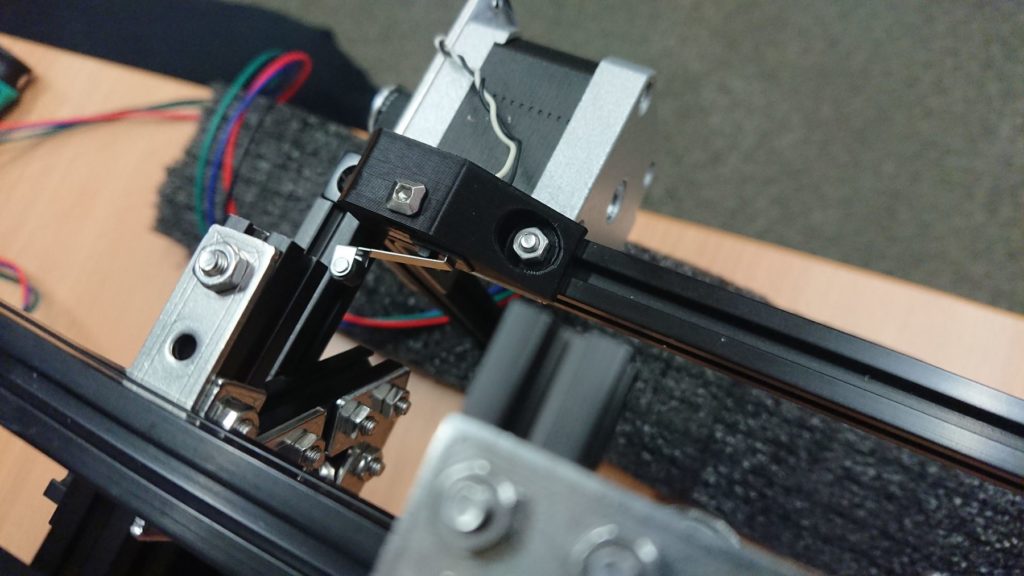
Dodatkowo: zliczanie obrotów koła.
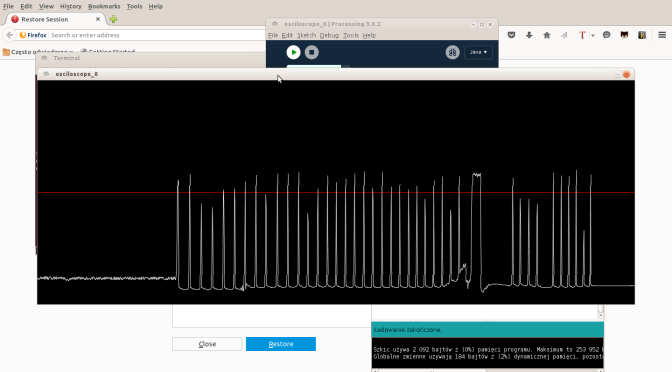
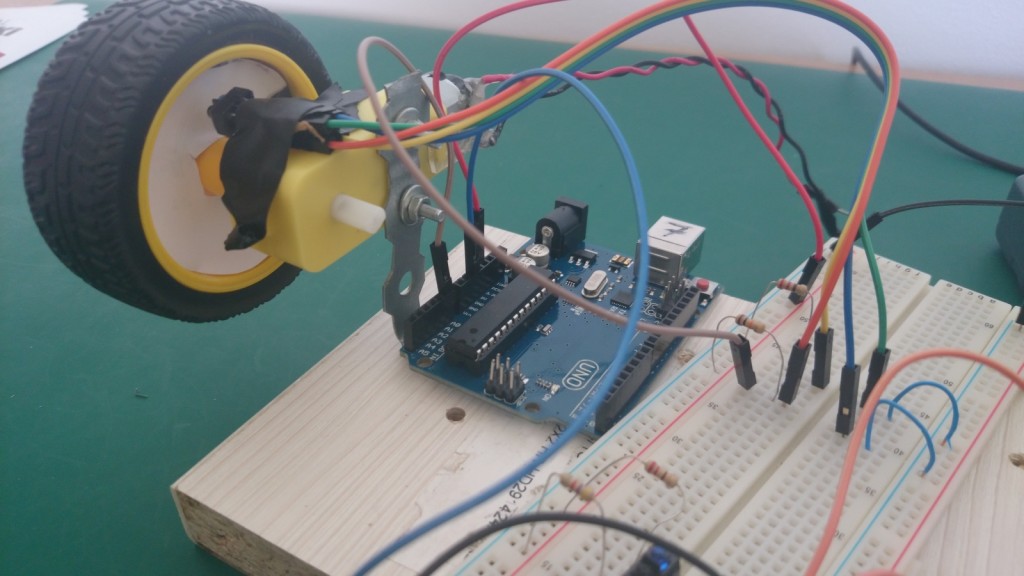
podłączyliśmy czujnik optyczny odbiciowy TCRT5000 do obudowy silniczka, a następnie wewnątrz koła umieściliśmy białą kartkę z czarną krechą. Czytamy wartości rejestrowane przez czujnik ale nie na Serial monitorze, ale GRAFICZNIE, za pomocą Processinga.
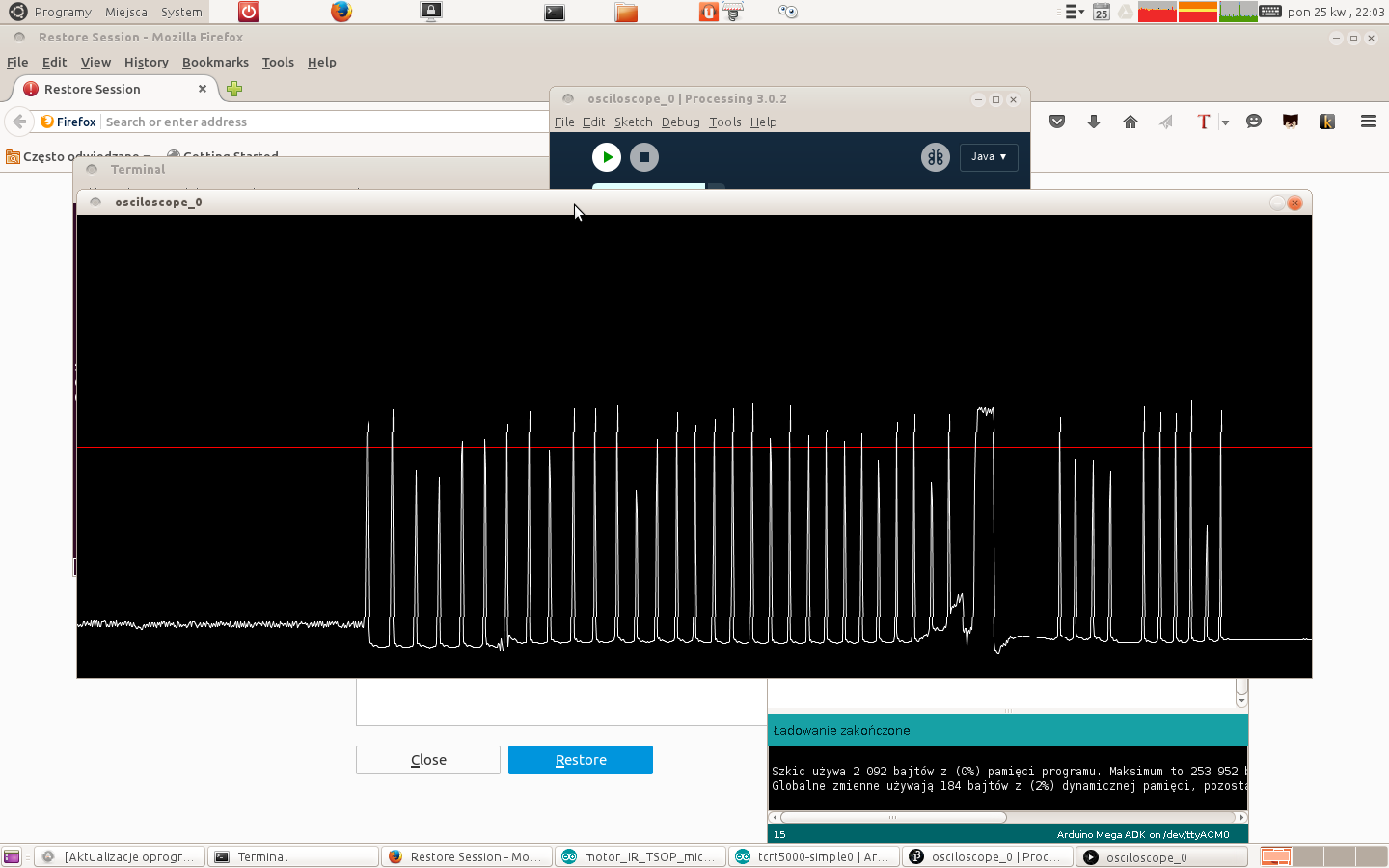
Widzimy wyraźnie moment, gdy czujka mija czarną kreskę. Widać też, że piki zdecydowanie różnią się od „tła”, choć często mają różną wartość w maksimum. Łatwo wykombinować prosty algorytm (czy skuteczny? niedługo się o tym przekonamy) liczący szybkość obrotową koła:
- zapisujemy t1, czyli czas pojawienia się maksimum (funkcja millis())
- czekamy na kolejne maksimum, gdy je złapiemy to
- zapisujemy t2, czyli czas pojawienia się kolejnego maksimum- wówczas różnica czasów t2 i t1 daje właśnie czas jednego, pełnego obrotu.
Pewnie „diabeł tkwi w szczegółach” ale powinno działać. Jak powiedziałem na zajęciach – więcej kresek (ale z umiarem! powiedzmy 4 na początek) powinny zwiększyć rozdzielczość zliczania liczby obrotów koła.
Będziemy to programować na kolejnych zajęciach…

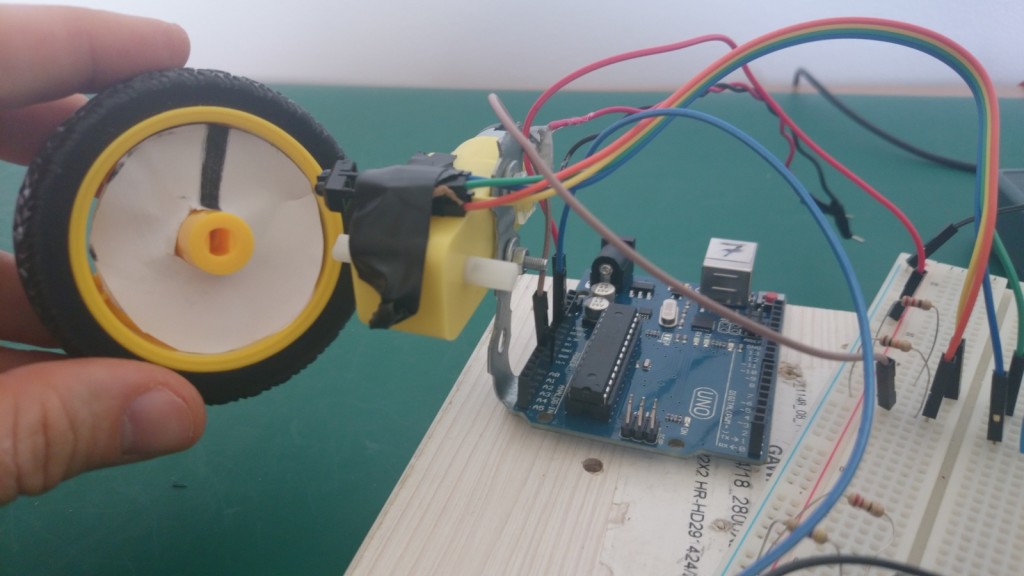
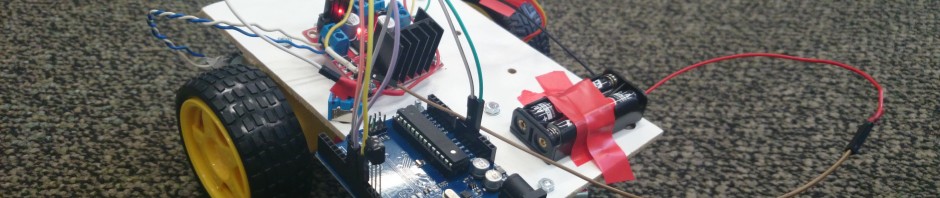
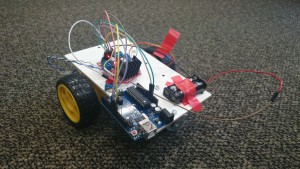
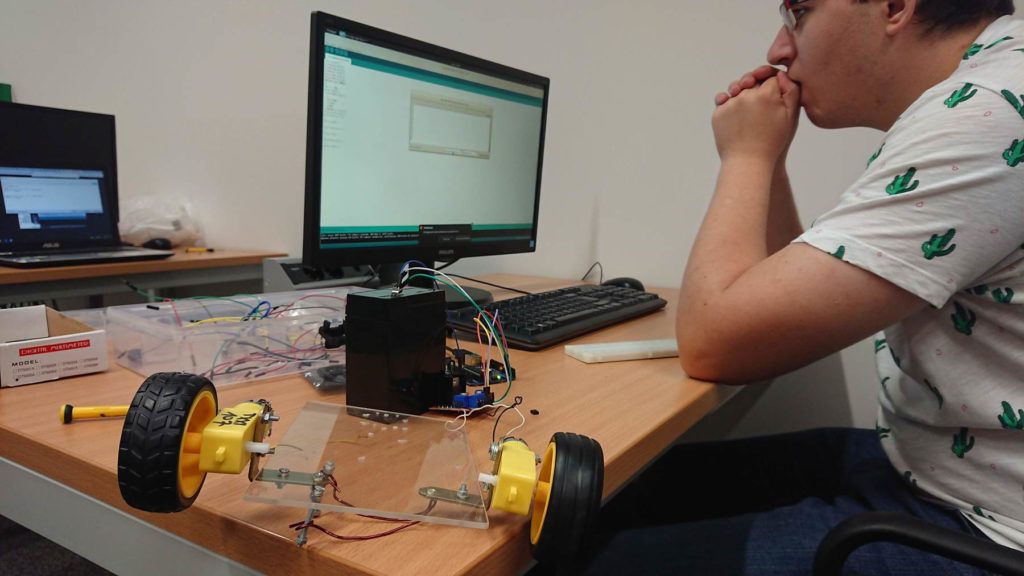 a następnie konstrukcja uległa modyfikacji (w tym także zasilanie) i powstała taka oto platforma testowa:
a następnie konstrukcja uległa modyfikacji (w tym także zasilanie) i powstała taka oto platforma testowa: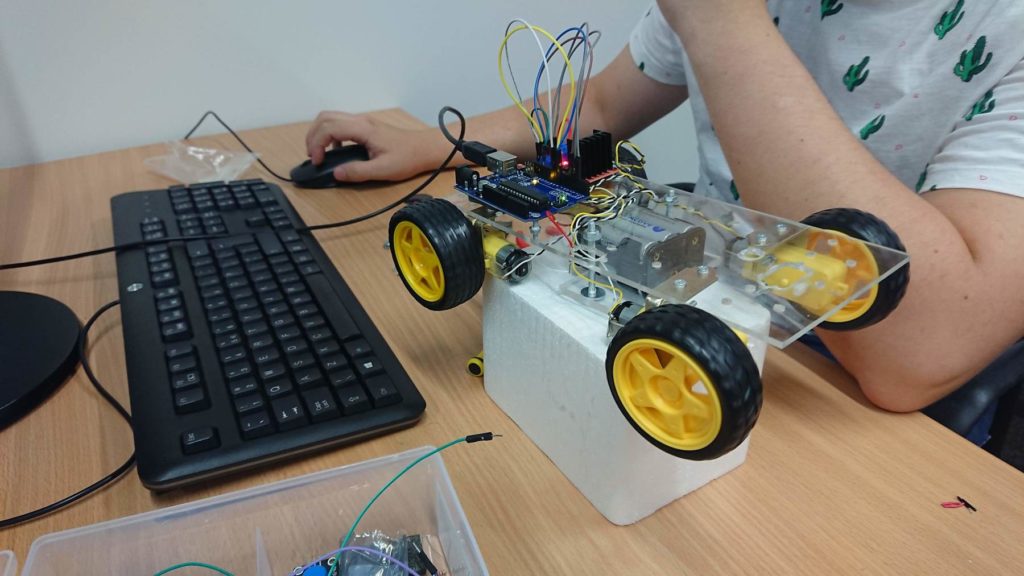 Udało się „nauczyć” jeździć ten pojazd do przodu, tyłu i skręcać. Na razie wykonuje on wszystkie te czynności w kółko – więc jest to mało sensowne. Ale kolejny krok to zdalne sterowanie i ten krok to już duży krok w kierunku Wojny Robotów 😉
Udało się „nauczyć” jeździć ten pojazd do przodu, tyłu i skręcać. Na razie wykonuje on wszystkie te czynności w kółko – więc jest to mało sensowne. Ale kolejny krok to zdalne sterowanie i ten krok to już duży krok w kierunku Wojny Robotów 😉
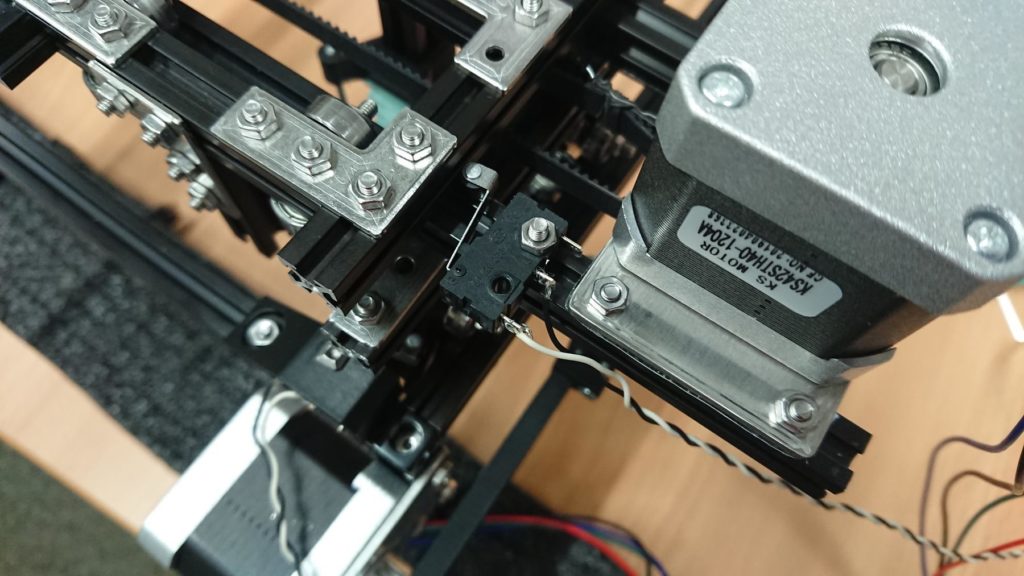
 Skoro są już krańcówki, to należy je oprogramować. Drogi są (co najmniej) dwie: 1) w programie realizującym poruszanie silnikami sprawdzamy, co się dzieje z krańcówkami – i w razie czego zatrzymujemy konkretny silnik, lub 2) inicjalizujemy przerwania, które robią to automatycznie. Jednak zanim doszło do tego to… pojawiły się problemy z rysowaniem linii po skosie. Przygotowany przez Pana Bartka kod miał działać – jednak okazało się, że ma wady. Wiadomo – ten się nie myli, kto nic nie robi 😉 Dlatego dzisiejsze zajęcia poszły w kierunku naprawy softwaru… Jeszcze jest trochę roboty 😉
Więcej o projekcie Maszyny na stronie projektu.
Skoro są już krańcówki, to należy je oprogramować. Drogi są (co najmniej) dwie: 1) w programie realizującym poruszanie silnikami sprawdzamy, co się dzieje z krańcówkami – i w razie czego zatrzymujemy konkretny silnik, lub 2) inicjalizujemy przerwania, które robią to automatycznie. Jednak zanim doszło do tego to… pojawiły się problemy z rysowaniem linii po skosie. Przygotowany przez Pana Bartka kod miał działać – jednak okazało się, że ma wady. Wiadomo – ten się nie myli, kto nic nie robi 😉 Dlatego dzisiejsze zajęcia poszły w kierunku naprawy softwaru… Jeszcze jest trochę roboty 😉
Więcej o projekcie Maszyny na stronie projektu.





 Właściwie niezbędny element, jeśli chcemy stworzyć mobilnego robota na płytce Arduino. W końcu zależy nam, aby „odczepić” się od komputera i portu szeregowego, ALE ciągle chcemy, aby Arduino do nas gadało 😉 Może to być stacja pogody, wyświetlająca na ekraniku aktualną temperaturę/ wilgotność/ prędkość wiatru/ cokolwiek (i nie musimy mieć podłączonego kompa!)…. może to być też pojazd na kółkach, którym sterujemy pilotem od TV – poznanym na naszym poprzednim spotkaniu. Wystarczy teraz połączyć wszystko do kupy (wraz ze sterownikiem silników – modułem L298D) i mamy zabawę! Warto wspomnieć, że sterownik ekraniku HD44780 obsługiwany jest przez bibliotekę LiquidCrystal — powinna być domyślnie zainstalowana w Arduino IDE.
Właściwie niezbędny element, jeśli chcemy stworzyć mobilnego robota na płytce Arduino. W końcu zależy nam, aby „odczepić” się od komputera i portu szeregowego, ALE ciągle chcemy, aby Arduino do nas gadało 😉 Może to być stacja pogody, wyświetlająca na ekraniku aktualną temperaturę/ wilgotność/ prędkość wiatru/ cokolwiek (i nie musimy mieć podłączonego kompa!)…. może to być też pojazd na kółkach, którym sterujemy pilotem od TV – poznanym na naszym poprzednim spotkaniu. Wystarczy teraz połączyć wszystko do kupy (wraz ze sterownikiem silników – modułem L298D) i mamy zabawę! Warto wspomnieć, że sterownik ekraniku HD44780 obsługiwany jest przez bibliotekę LiquidCrystal — powinna być domyślnie zainstalowana w Arduino IDE.


 Inni męczyli się jeszcze ze sterowaniem pojedynczym kołem przez pilot TV – mam nadzieję, że to „męczenie” było całkiem przyjemne i zachęcające do naszego następnego spotkania, za tydzień. Na nim wszyscy stworzą swojego pierwszego mobilnego robota. Zapraszam!
Inni męczyli się jeszcze ze sterowaniem pojedynczym kołem przez pilot TV – mam nadzieję, że to „męczenie” było całkiem przyjemne i zachęcające do naszego następnego spotkania, za tydzień. Na nim wszyscy stworzą swojego pierwszego mobilnego robota. Zapraszam!

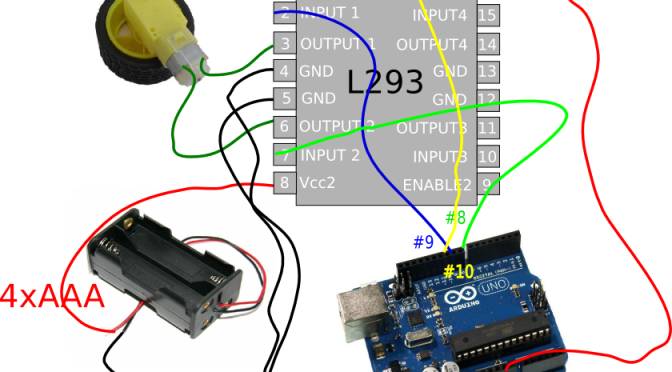
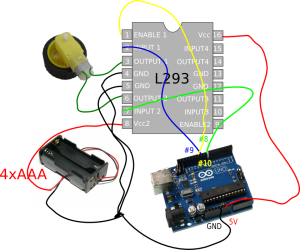
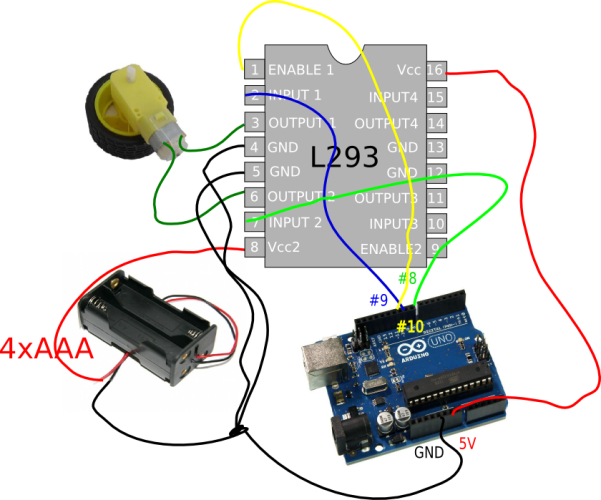
 iś jest naszym nowym kolegą 😉 Prosty w obsłudze a umożliwia: podłączenie zewnętrznego zasilania do silników (np. większego niż 5V z Arduino – jakieś akumulatorki…), sterowaniem dwoma silnikami DC, oraz sterowanie mocą silnika. Programowanie tego układu jest bardzo proste – o ile rozumiemy jak programować cyfrowe wyjścia Arduino, ale poto tyle czasu męczyliśmy się właśnie z LEDami i PWMami, aby taki L293 był bajecznie prosty. Warte zapamiętania jest sekwencja sterująca: dwa jednakowe sygnały oznaczają STOP, sygnały „zero” i „jeden” RUCH w jedną stronę, „jeden” i „zero” RUCH w drugą stronę. Proste. Dodatkowo zapoznaliśmy się z mod
iś jest naszym nowym kolegą 😉 Prosty w obsłudze a umożliwia: podłączenie zewnętrznego zasilania do silników (np. większego niż 5V z Arduino – jakieś akumulatorki…), sterowaniem dwoma silnikami DC, oraz sterowanie mocą silnika. Programowanie tego układu jest bardzo proste – o ile rozumiemy jak programować cyfrowe wyjścia Arduino, ale poto tyle czasu męczyliśmy się właśnie z LEDami i PWMami, aby taki L293 był bajecznie prosty. Warte zapamiętania jest sekwencja sterująca: dwa jednakowe sygnały oznaczają STOP, sygnały „zero” i „jeden” RUCH w jedną stronę, „jeden” i „zero” RUCH w drugą stronę. Proste. Dodatkowo zapoznaliśmy się z mod ułem na bazie układów L293 (tutaj: L298) i pokazałem, jak się z nimi obchodzić (bateryjka + śrubokręt). Tutaj warto pamiętać o drobnych (acz istotnych) szczegółach z not katalogowych tych układów (przede wszystkim: maksymalny prąd pracy!).
ułem na bazie układów L293 (tutaj: L298) i pokazałem, jak się z nimi obchodzić (bateryjka + śrubokręt). Tutaj warto pamiętać o drobnych (acz istotnych) szczegółach z not katalogowych tych układów (przede wszystkim: maksymalny prąd pracy!).