Z serwisu Forbot o zbrojeniu wydruków 3D oraz film z YT autorstwa Brauns CNC
(c) K. G. 2019

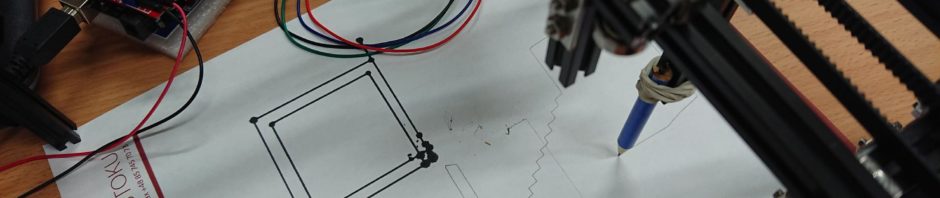
 No i kolejny (próbny) precyzyjny rysunek:
Opis całego proejktu Maszyny pod tym adresem.
No i kolejny (próbny) precyzyjny rysunek:
Opis całego proejktu Maszyny pod tym adresem.

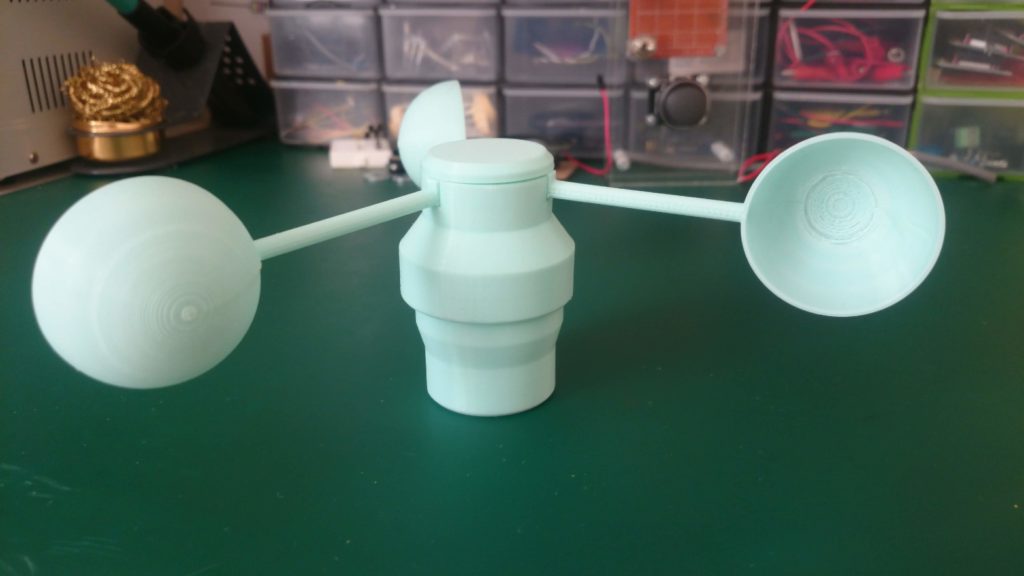
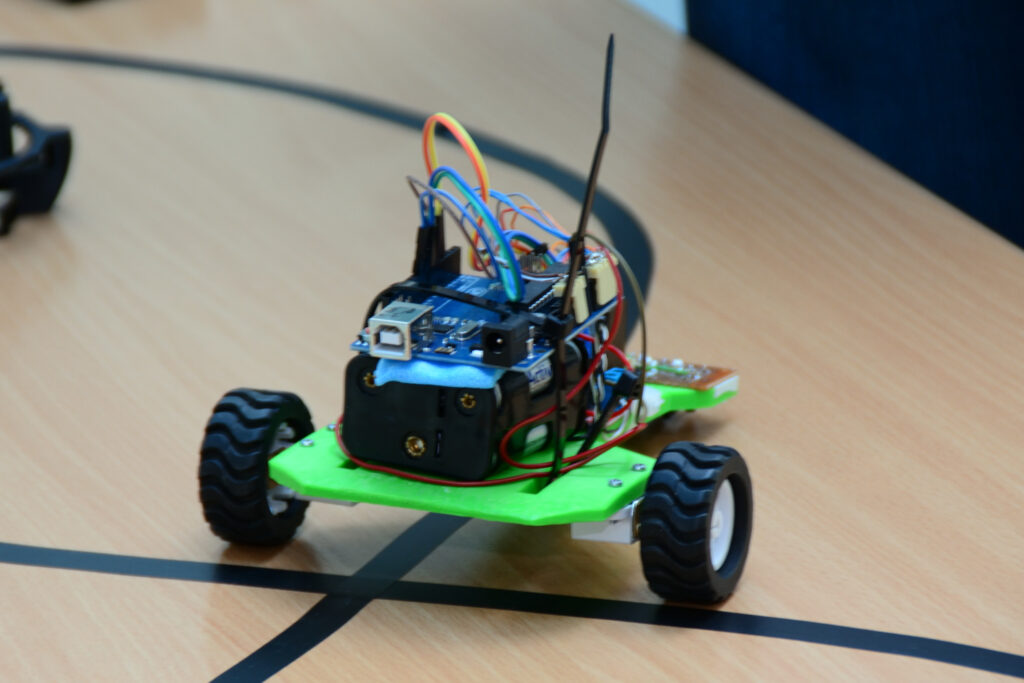
 A po co nam zliczanie tych obrotów? Zastosowań jest wiele, jednym z nich jest mierzenie prędkości wiatru takim prostym urządzeniem:
A po co nam zliczanie tych obrotów? Zastosowań jest wiele, jednym z nich jest mierzenie prędkości wiatru takim prostym urządzeniem:
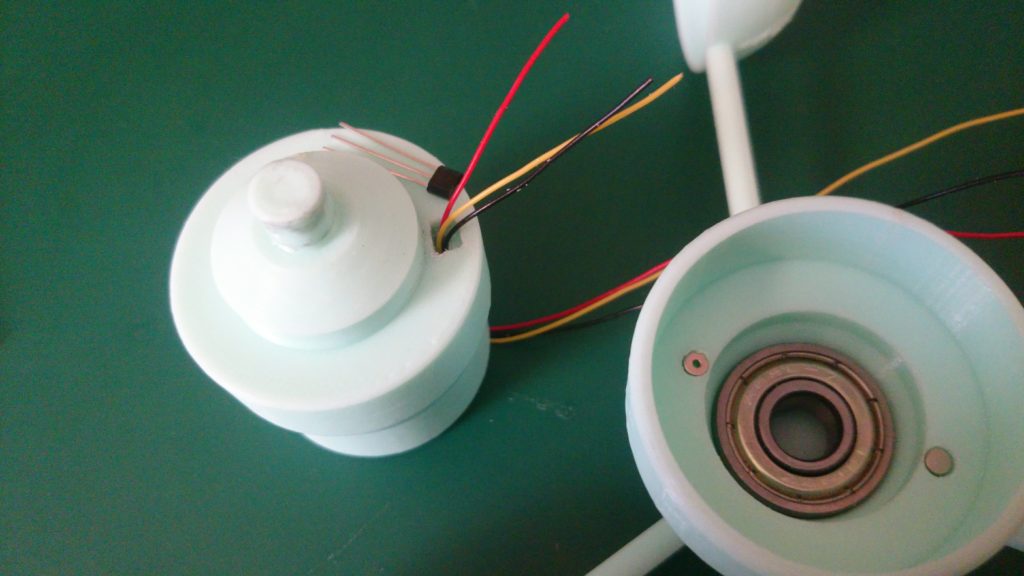
 w środku którego znajdują się: czujka SS49E, dwa magnesy oraz łożysko kulkowe (typ 682ZZ).
w środku którego znajdują się: czujka SS49E, dwa magnesy oraz łożysko kulkowe (typ 682ZZ).
 O dalszych losach tego projektu niebawem…
O dalszych losach tego projektu niebawem…
(c) K.G.
 Ciągle jest kilka kwestii do zrobienia:
Ciągle jest kilka kwestii do zrobienia:
(c) K.G.
Z serwisu Forbot: o nowym RaspberryPi v4 oraz o nowej wersji dystrybucji Raspbian. Od razu ostrzegam, że chwilowo nie ma oprogramowania Wolfram Mathematicy! Więcej info na oficjalnej www. Ale… to (ponoć) kwestia czasu, więc… cierpliwości!
Polecam obejrzeć fimlmik z YT (by ExplainingComputers) o nowej Malince:
UPDATE (05-7-2019):
Mathematica zniknęła z dystrybucji Raspbian, bo skończyła się 5-cio letnia umowa. Na szczęście można już samodzielnie zainstalować wersję 12 Mathematicy na RPi!
sudo apt-get update
sudo apt-get install wolfram-engine
(c) K. G. 2019

 I najważniejsze – wózki:
I najważniejsze – wózki:
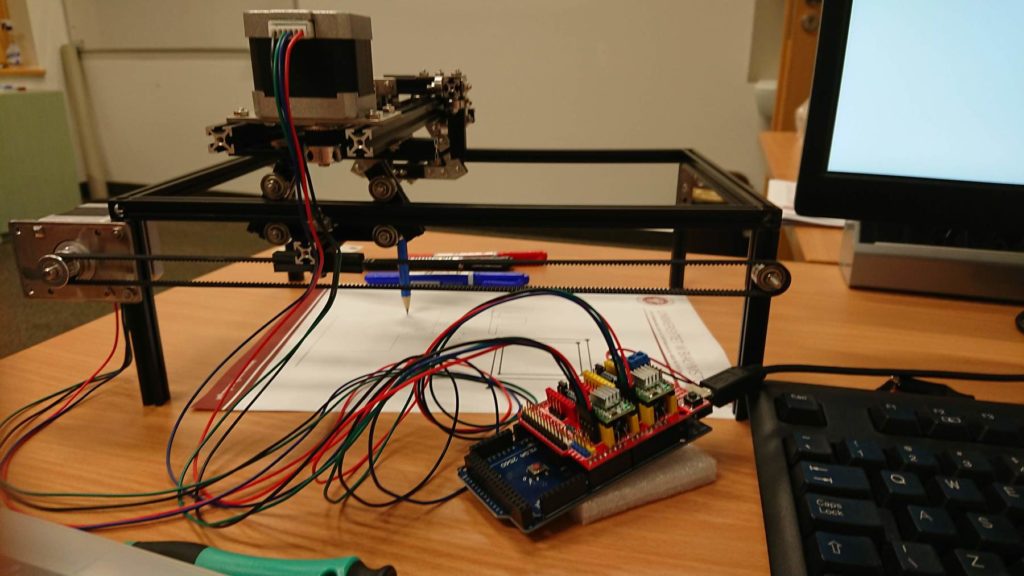
 Chwilowo paski to zwykła dętka rowerowa (odpowiednie paski w drodze). Sterowanie shieldem do silników krokowych i maszyn CNC:
Chwilowo paski to zwykła dętka rowerowa (odpowiednie paski w drodze). Sterowanie shieldem do silników krokowych i maszyn CNC:
 Taki shield to fajna sprawa – oszczędza plątaniny przewodów. Jego programowanie jest bajecznie proste. Używamy modułów A4988 sterowników silników:
Taki shield to fajna sprawa – oszczędza plątaniny przewodów. Jego programowanie jest bajecznie proste. Używamy modułów A4988 sterowników silników:
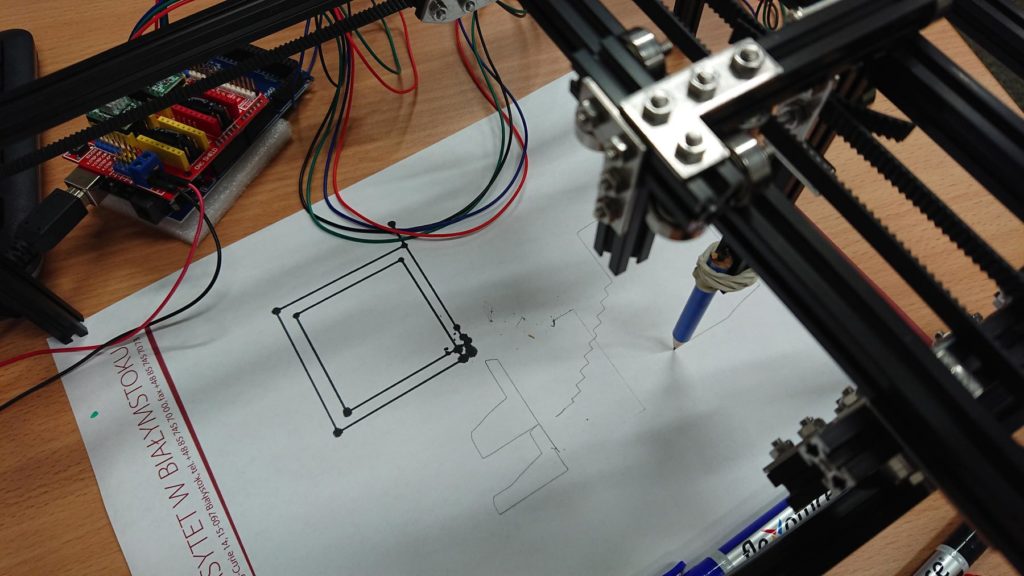
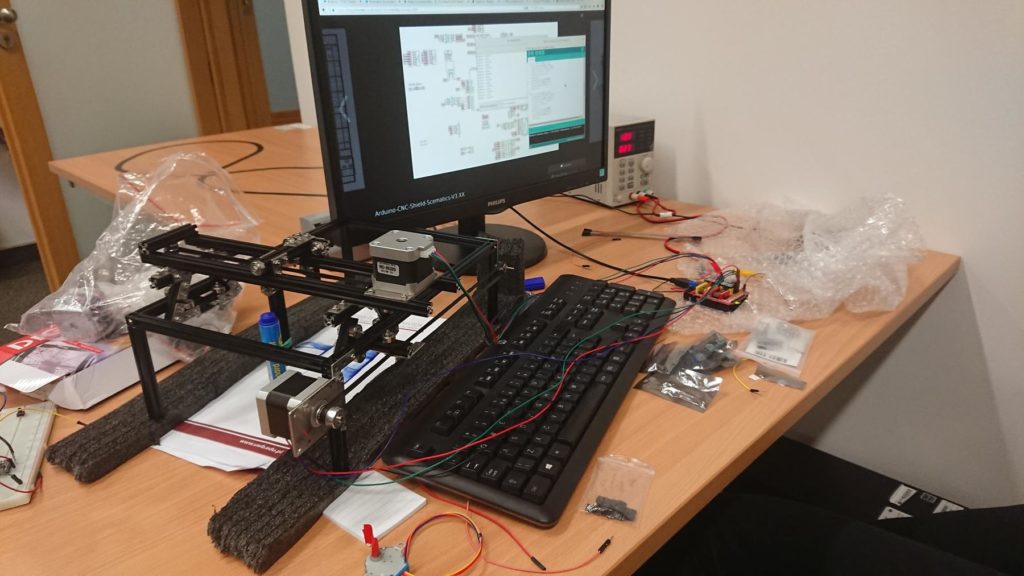
 Wszystko złożone i gotowe do pracy wyglądało tak:
Wszystko złożone i gotowe do pracy wyglądało tak:
 A jak to działa?
Na filmie powyżej dodatkowy (tymczasowy) element – gąbki, to wyciszenie (cała konstrukcja lekko drga, a metalowe śrubki lekko dzwonią). Mamy pomysł co z robić z tym „fantem” – będzie i skuteczne, i zabawne 😉 W strylu Pana Bartka – wydrukuje się w 3D odpowiednie podkładki. Niebawem się okaże.
A teraz dwa silniki w akcji:
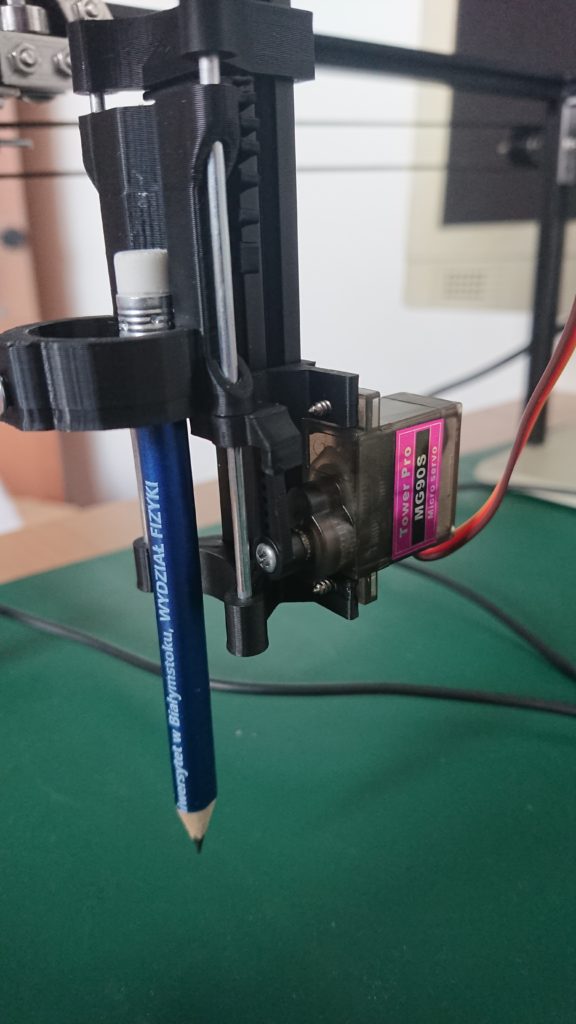
Nie mogliśmy się oprzeć pokusie „zainstalowania” precyzyjnego pisaka 😉 i wykonania pierwszego „precyzyjnego” rysunku:
A jak to działa?
Na filmie powyżej dodatkowy (tymczasowy) element – gąbki, to wyciszenie (cała konstrukcja lekko drga, a metalowe śrubki lekko dzwonią). Mamy pomysł co z robić z tym „fantem” – będzie i skuteczne, i zabawne 😉 W strylu Pana Bartka – wydrukuje się w 3D odpowiednie podkładki. Niebawem się okaże.
A teraz dwa silniki w akcji:
Nie mogliśmy się oprzeć pokusie „zainstalowania” precyzyjnego pisaka 😉 i wykonania pierwszego „precyzyjnego” rysunku:
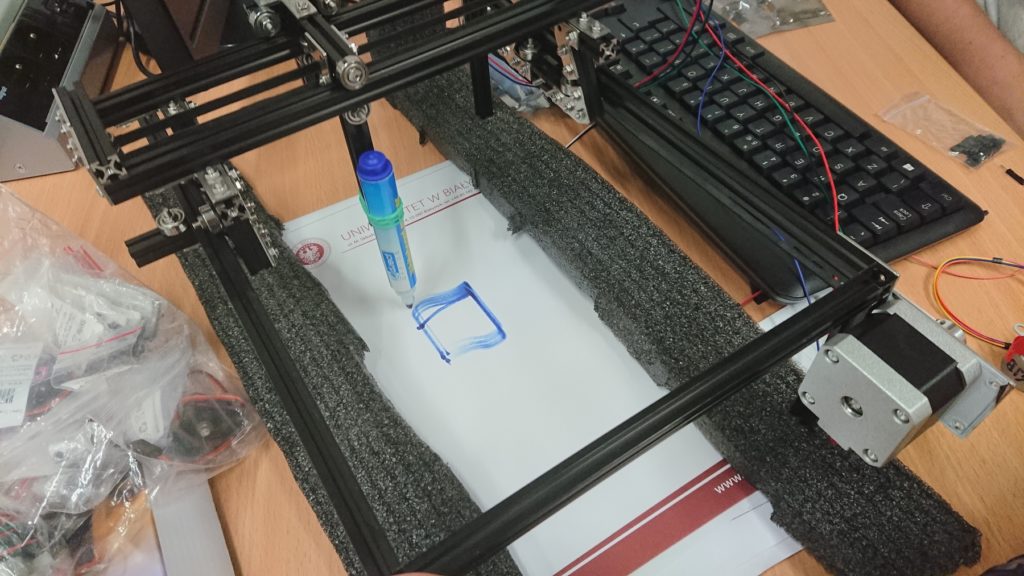 Na uwagę zasługują gradienty koloru i efektowne falki. Jak się takie rzeczy programuje – chwilowo pozostawiamy w tajemnicy 😀 Filmik
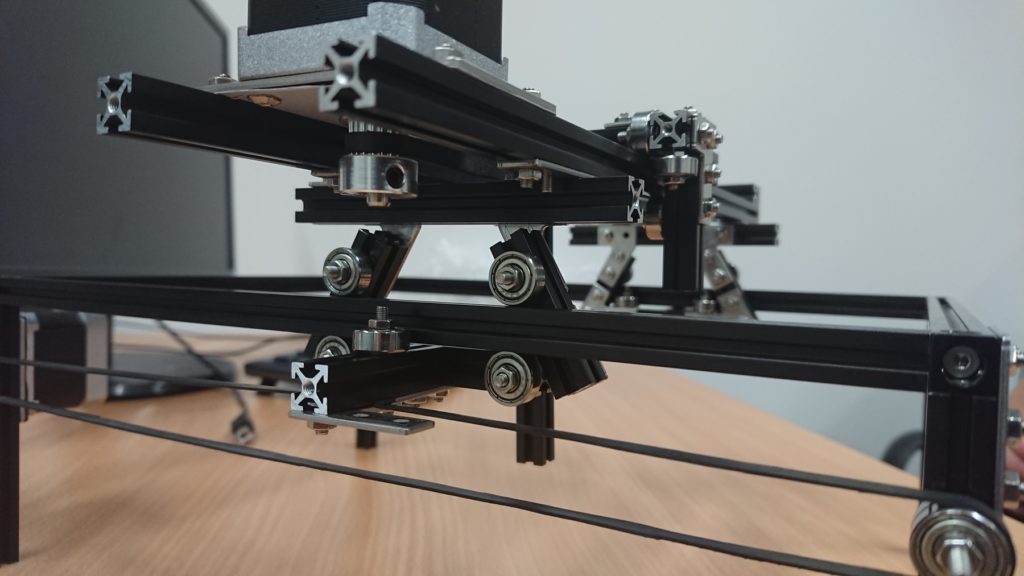
Poniżej najważniejsi gracze z prezentowanej maszyny: wózki konstrukcji Pana Bartka – gratuluję pomysłowości!
Na uwagę zasługują gradienty koloru i efektowne falki. Jak się takie rzeczy programuje – chwilowo pozostawiamy w tajemnicy 😀 Filmik
Poniżej najważniejsi gracze z prezentowanej maszyny: wózki konstrukcji Pana Bartka – gratuluję pomysłowości!

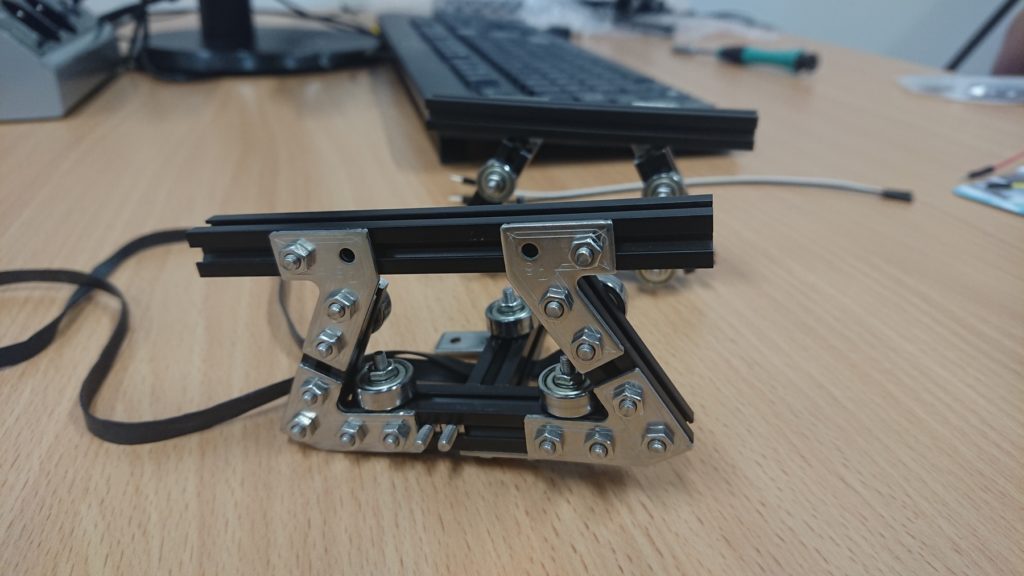 Widać, że prace idą w (bardzo) dobrym kierunku. Niebawem kolejne etapy produkcji – wszystko aktualizowane na oddzielnej stronie projektu.
Widać, że prace idą w (bardzo) dobrym kierunku. Niebawem kolejne etapy produkcji – wszystko aktualizowane na oddzielnej stronie projektu.
(c) K.G.
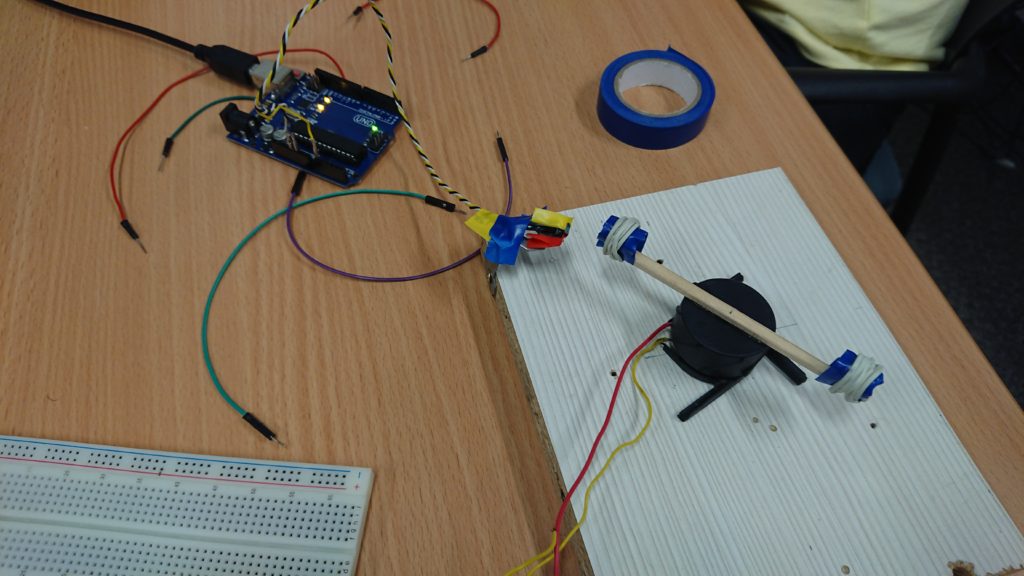
 Właśnie z powodu nowego pomyłu przetestowaliśmy działanie czujki pola magnetycznego SS49E – dziecinnie proste 😉 Podłączamy do zasilania (5V z Arduino UNO) a wyjście #3 do portu analogowego.
Właśnie z powodu nowego pomyłu przetestowaliśmy działanie czujki pola magnetycznego SS49E – dziecinnie proste 😉 Podłączamy do zasilania (5V z Arduino UNO) a wyjście #3 do portu analogowego.
 Odczytywane napięcie z portu analogowego tłumaczymy na wartość pola magnetycznego zgodnie z poniższym rysunkiem (z noty katalogowej czujnika).
Odczytywane napięcie z portu analogowego tłumaczymy na wartość pola magnetycznego zgodnie z poniższym rysunkiem (z noty katalogowej czujnika).
 Zaletą tego konretnego czujnika (SS49E) jest możliwość odczytywania pola z obu biegunów magnesu – czyli z biegunu półnonego i południowego. Są bowiem inne czujki, które informują nas jedynie o wartości pola z jednego bieguna, a na pole z przeciwnego bieguna są „głuche”.
Nas nie interesują wartości w mT, a raczej sama informacja zbliżenia do magnesu. No właśnie – przetesowaliśmy kilka małych (i większych) magnesów, w tym neodymowe – bardzo silne. Będzie się działo!
Zaletą tego konretnego czujnika (SS49E) jest możliwość odczytywania pola z obu biegunów magnesu – czyli z biegunu półnonego i południowego. Są bowiem inne czujki, które informują nas jedynie o wartości pola z jednego bieguna, a na pole z przeciwnego bieguna są „głuche”.
Nas nie interesują wartości w mT, a raczej sama informacja zbliżenia do magnesu. No właśnie – przetesowaliśmy kilka małych (i większych) magnesów, w tym neodymowe – bardzo silne. Będzie się działo!
(c) K.G.

(c) K.G.


Oficjalna relacja z Podlaskiego festiwalu – w kronice Wydziału Fizyki.

Ostatnio skończyliśmy na dopasowaniu aluminiowej skórki do naszej skorupy…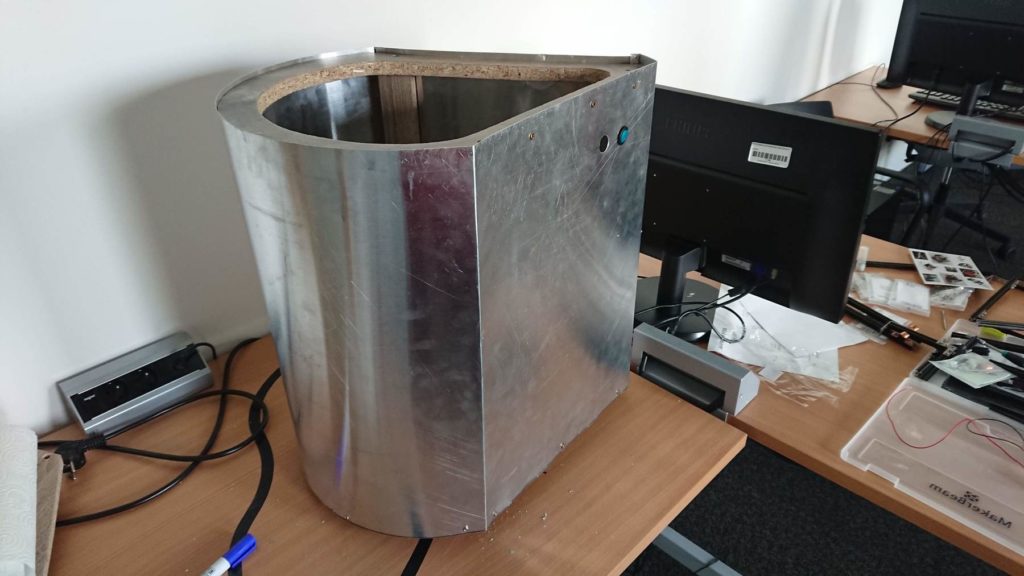
W końcu przyszedł czas na pomalowanie obudowy: najpierw podkład, aby farba dobrze się trzymała, potem malowanie, potem składanie wszystkiego do całości i (po drobnych korektach) uruchomienie i sukces!











Po części mechanicznej wracamy do kolejnych etapów: malowanie, klejenie pasków z LEDami, instalowanie „bebechów”… Ale to już „ostatecznie” i „na wieki” 😀
(c) K.G. 2019

Kolejny projekt – na bazie poprzedniego – tym razem z dużym otworem, aby oryginalne mocowanie do śmigieł mogło być zastosowane (dzięki temu nie będę się obawiać oderwania turbiny i zrobienia komuś krzywdy).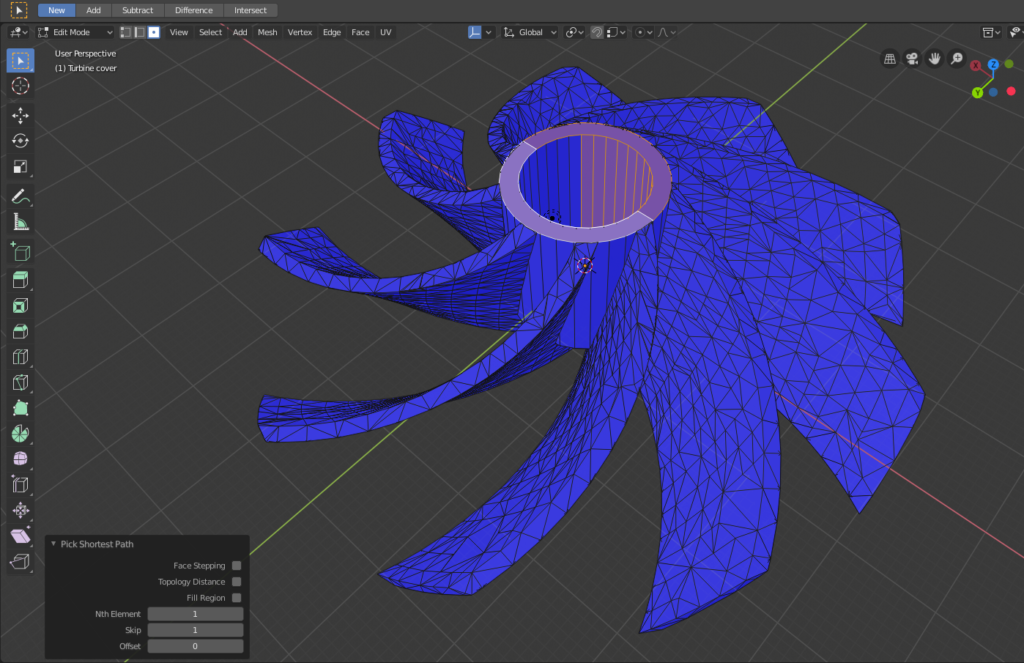 A potem wydruk 3D i wynik:
A potem wydruk 3D i wynik:
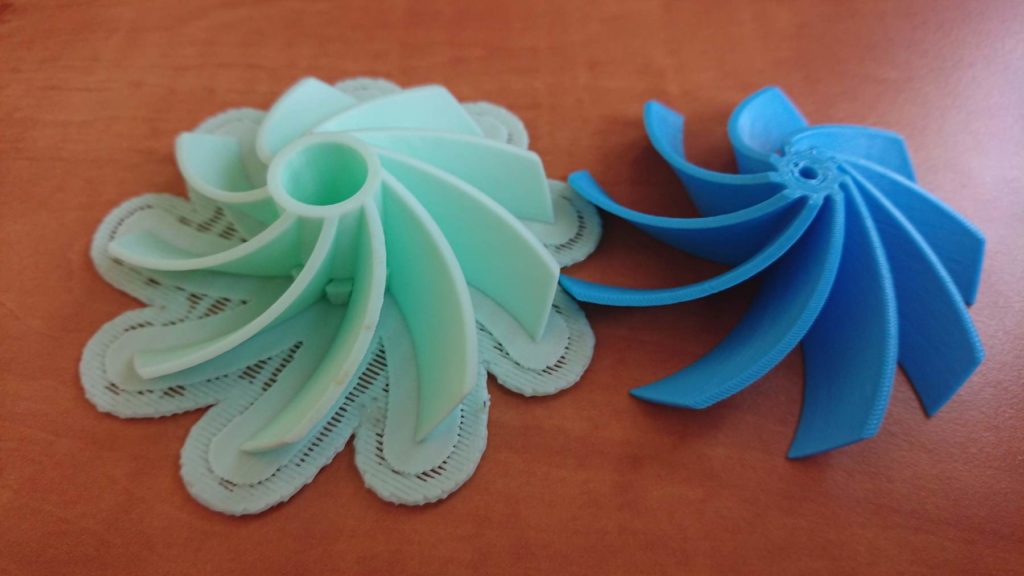
(po prawej stary wydruk, Pana Bartka – ale otwór trzeba było klinować, co działało tylko na trochę). Nowy mieści już w środku oryginalną piastę samozaciskową, co mnie bardzo uspokaja, gdyż bezpieczeństwo przede wszystkim!
Drut okazał się słabym „kluczykiem”, Pan Bartek wykombinował lepszy „kluczyk” z cienkiego gwoździa 😉
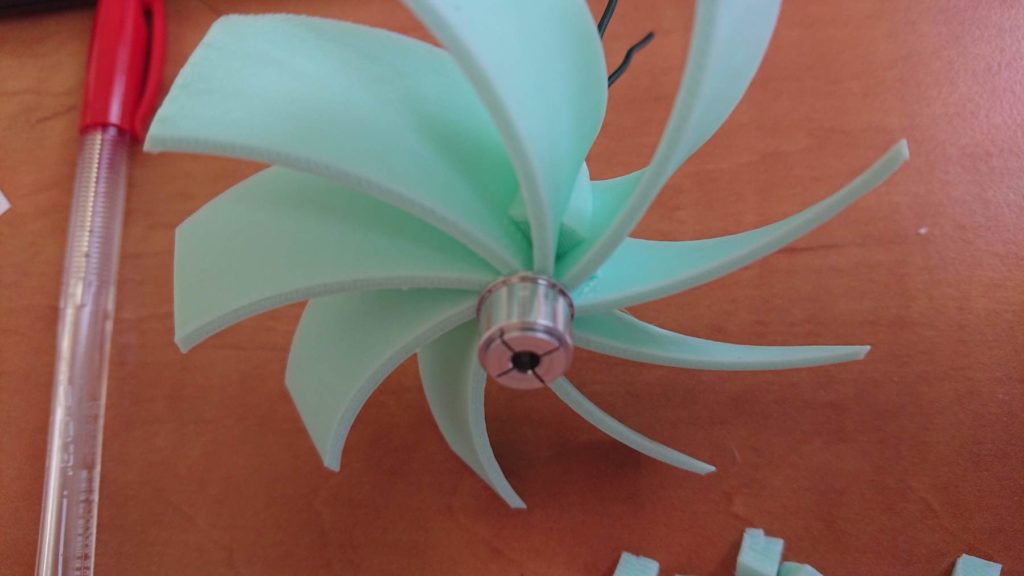
No i teraz można kręcić na maksa!
(c) K.G. 2019