Robot MASKOTKA
Autor projektu:
- (pierwszy etap) Paweł Butkiewicz (II rok fizyki ogólnej) + Bartek Butler (I rok fizyki gier komputerowych i robotów) + studenci koła Fi-BOT (studenci fizyki + studenci informatyki).
- (drugi etap) Przemek Pytel (II rok fizyki ogólnej) + Bartek Butler (II rok fizyki gier komputerowych i robotów)
- (drugi+ etap) Bartek Butler (III rok fizyki gier komputerowych i robotówj)
Skrócony opis projektu
Projekt zakłada budowę dużego, mobilnego robota reklamującego Wydział
Fizyki. Taki robot ma „występować” podczas imprez rekrutacyjnych na terenie Kampusu UwB, lub podczas wyjazdów promocyjnych (targi edukacyjne itd). Nacisk położony będzie na rozmiar – chodzi nam o coś wyrazistego, trudnego do przeoczenia podczas masowych imprez. Nie zamierzamy jednak kopiować znanych robotów z filmów – jak R2D2 (czy z gier wideo), a raczej stworzyć coś swojego.
Robot ma być sterowany przez platformę Arduino za pomoca komunikacji
bezprzewodowej – aplikacja ze smartfona. W planach jest też jazda bez operatora – czyli jazda autonomiczna. Docelowo chcemy wyposażyc naszego robota w panel LCD (np. 10 calowy) z możliwością dotyku. Dzięki takiemu panelowi robot będzie mógł komunikować się z uczestnikami imprez. Planujemy wyposażenie robota w czujniki odległości – aby
podczas jazdy autonomicznej nie zderzał się z ludźmi (wiadomo) oraz ze ścianami (nie chcemy go zniszczyć). Robot musi jeździć do ~3h na bateriach z możliwością łatwego wymiany akumulatorów.
Cel
Popularyzacja Wydziału Fizyki, nauk ścislych na Uniwersytecie w Białymstoku, oraz Kampusu UwB. Cele dla koła naukowego Fi-BOT: nauka projektowania, programowania i praca grupowa.
Pierwszy etap – zakończony!
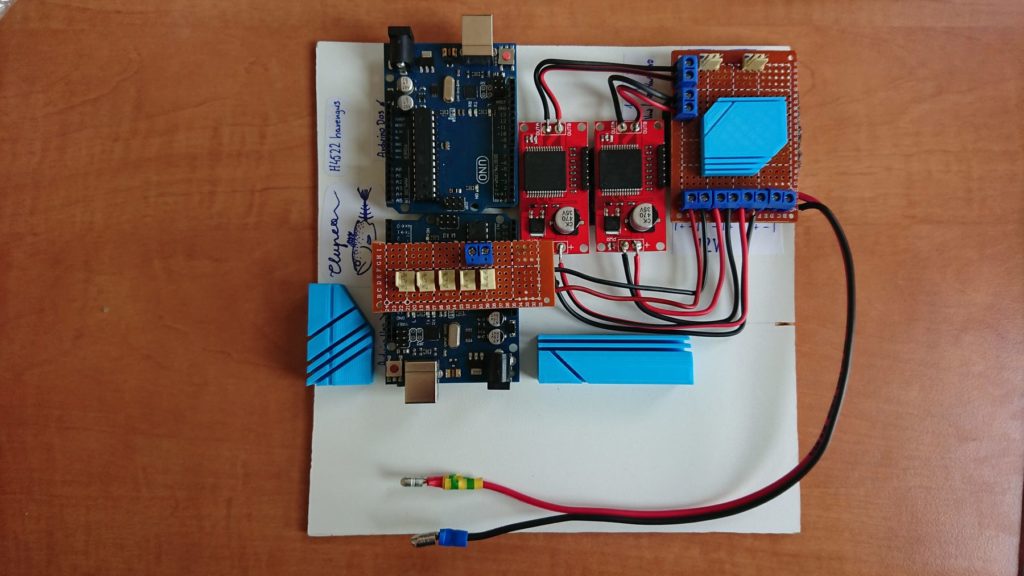
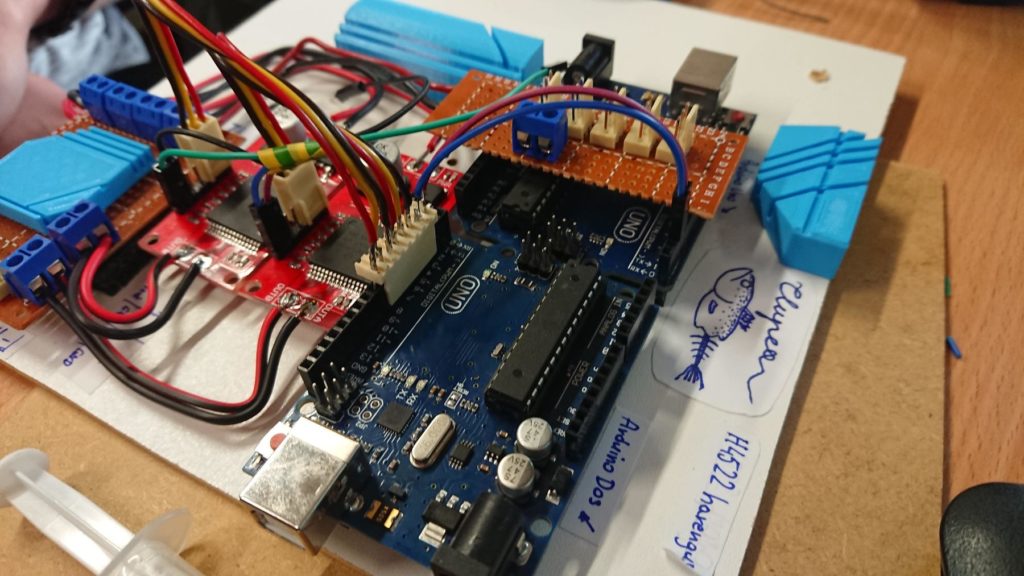
- Pierwsza płytka Arduino UNO steruje silnikami (2x Monster VNH2P30) oraz odbiera komunikację z modułu Bluetooth (XM-15B).
- Druga płytka Arduino UNO steruje oświetleniem (ledy WS2812b). Obie połączone są ze sobą (2x piny cyfrowe) – wybór efektu dla LEDów podaje pierwsza płytka (aktualnie tylko 2 piny, ale może więcej w przyszłości).
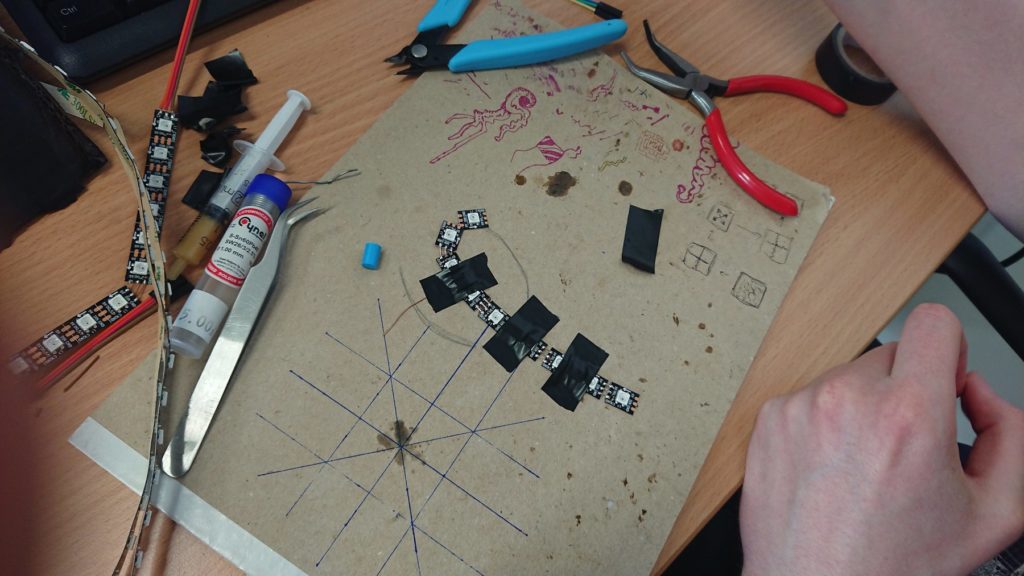
- Na drugim Arduino zamocowany jest shield (wykonanie P. Bartek) sterujący ledami z „pro” konektorami ?
- W perspektywie jest wymiana drugiego UNO na Mega, bo jest chęć dołożenia przycisków – choć można zawsze pobawić się multiplekserem i nie wymieniać na Mega (zobaczymy).
- Dodanie „ukrytych przycisków” do sterowania efektami oświetlenia bez aplikacji AndroidRC – to uniezależni Maskotkę od pierwszego Arduino UNO i zwiększy jej walory demonstracyjne (a także na wypadek jakiejś awarii pierwszego układu).
- Aktualnie sterowanie odbywa się przez Bluetooth (moduł XM-15B) i apkę AndroidRC (bo najprościej i działa). W planach jest zrobienie kontrolera i wykorzystanie modułu radiowego nRF24L01 2.4GHz (który znamy i lubimy).
Aku trzeba przymocować „pasami” (na rzep).Upgrade obudowy (aluminiowa, pomalowana z podkładem).- Więcej efektów świetlnych?
Wyszła spora plątanina przewodów… nieelegancko więc będzie trzeba nad tym popracować (zebrac wszystko na płytę główną).- Wentylacja (w sieć grafenu z drukarki 3D? kto wie…).
- Głośniczek i prosta komunikacja?
- Głowa robota – kask? nadmuchiwany ludek?
- Komunikacja – LCD? OLED?
Drugi etap – start (XI 2019)
- 25.11.2019 Zmiana komunikacji: Bluetooth zastąpiony radiówką!
- 2.12.2019 Wymiana kół, projekt konsoli.
- 9.12.2019 Wymiana kół – prace manualne.
- 16.12.2019 Wymiana kół – jednak znowu prace ręczne (piła).
- 23.12.2019 Wymiana kół – ponownie ręczna piła… Skończone!
- 03.01.2020 Jeździ i świeci! Pierwsze uruchomienie.
- 13.01.2020 Przetwornica step-down.
Drugi etap+ reaktywacja! start (XII 2020)
- 07.12.2020 Trzymaki zasilania (druk 3D).
- 14.12.2020 Programowanie sterowania – ArduinoUNO zgon!
- 21.12.2020 Soft do sterowania (pojazd śmiga!) + wymiana przewodów (nowe konektory).
- 01.04.2021 Płyta główna…
- 08.04.2021 Płyta główna…
- 15.04.2021 Sterowanie Maskotką: PID!
- 30.04.2021 Sterowanie Maskotką: mapowanie kwadratu na koło
- 29.08.2021 Prezentacja projektu podczas Urodzin Epi-Centrum Nauki
I-szy etap: Koncept
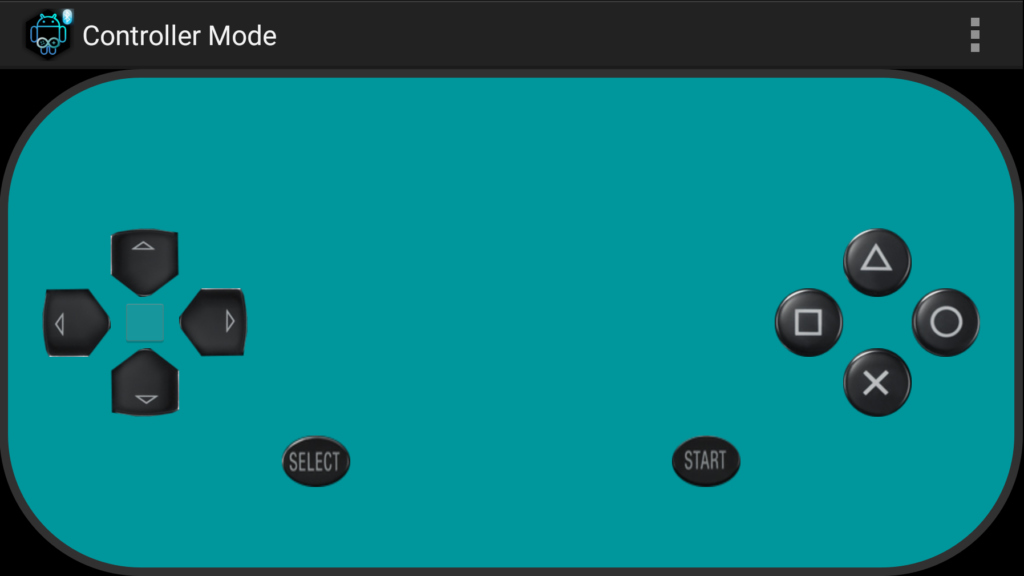
Sterowanie
Odbywa się przez modułu Bluetooth (XM-15B) oraz aplikację ArduinoRC. Dlaczego taki sposób? Bo łatwy w implementacji 😉 Ale zamierzamy stworzyć własny kontroler na bazie nRF24L01.
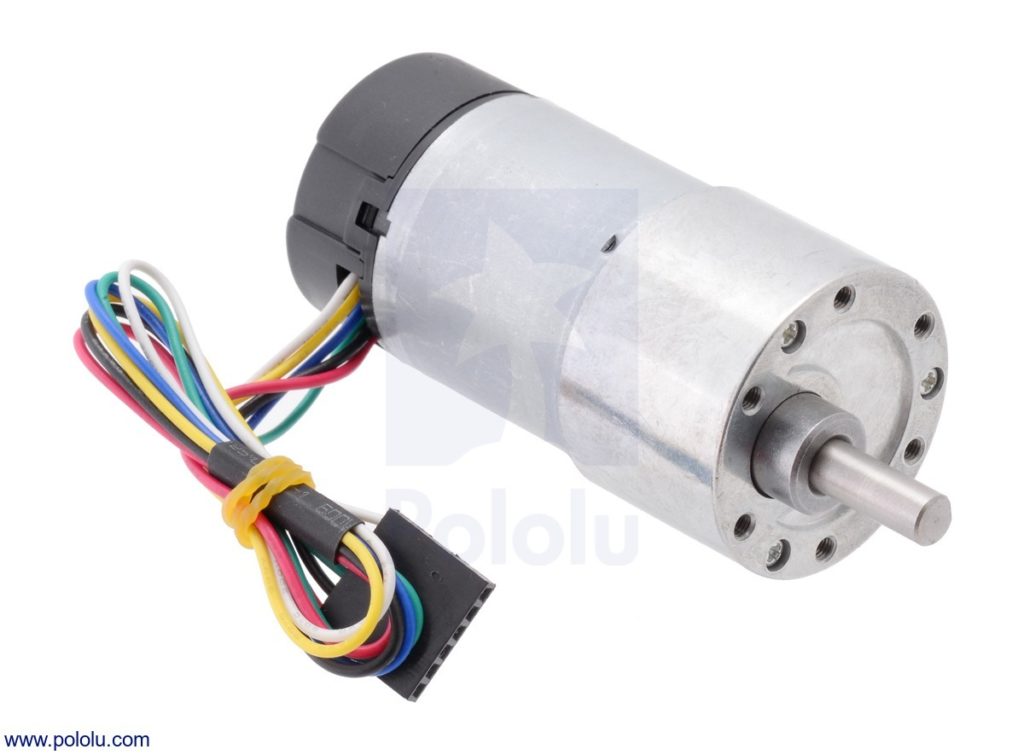
Silniki


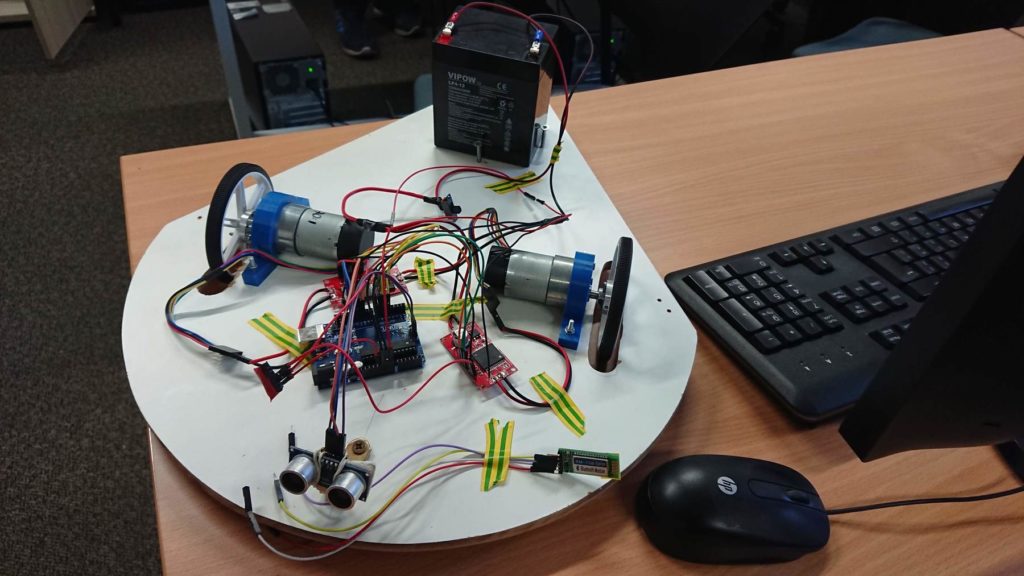
Zasilanie
Akumulator żelowy 12V 4.0Ah. Charakterystyka napięć (25C):
- tryb czuwania: 13.6-13.8V
- praca cykliczna: 14.5-14.9V
- maksymalny prąd inicjacji: ponizej 1.2A
Programowanie

Jazda autonomiczna – pierwsze próby
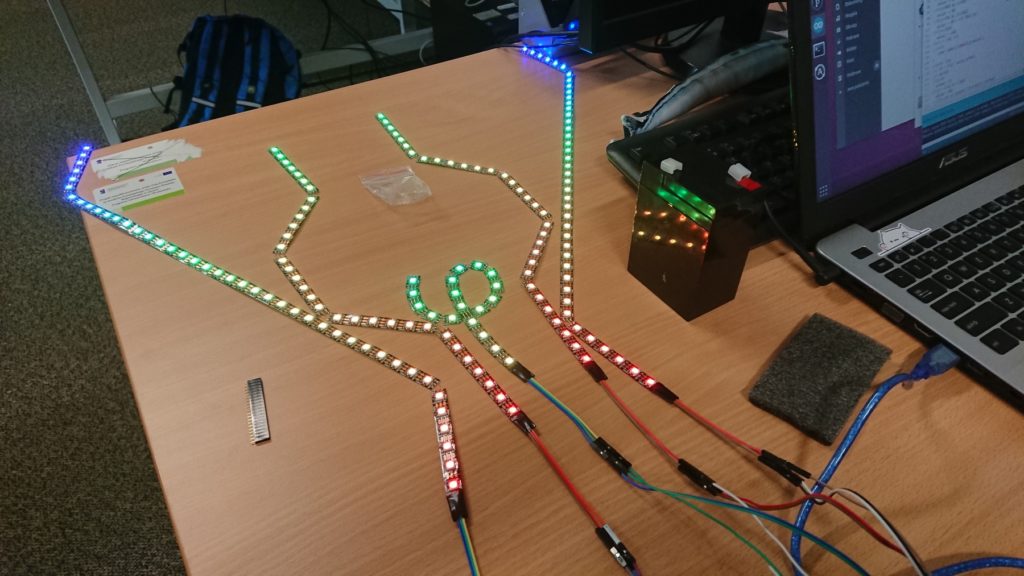
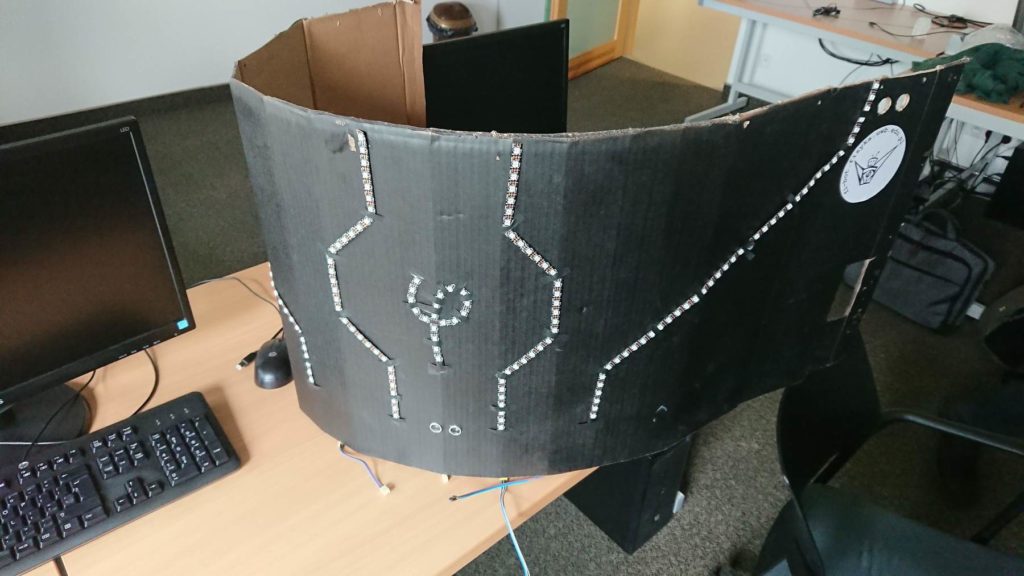
Bajery – efekty świetlne
Arduino UNO steruje oświetleniem – paski ledów WS2812b. Ogromny wkład Pana Bartka Butlera (I rok fizyki gier komputerowych i robotów).
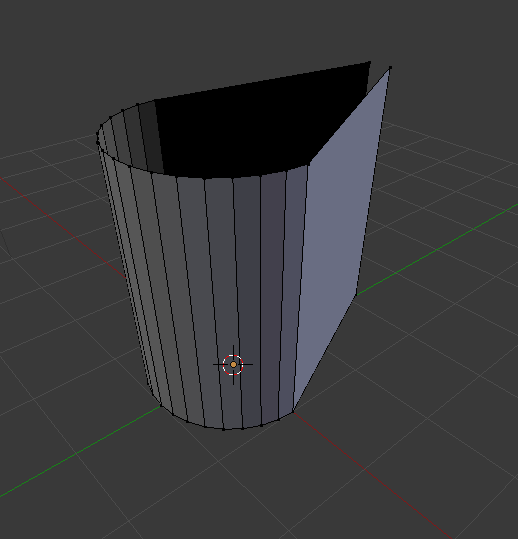
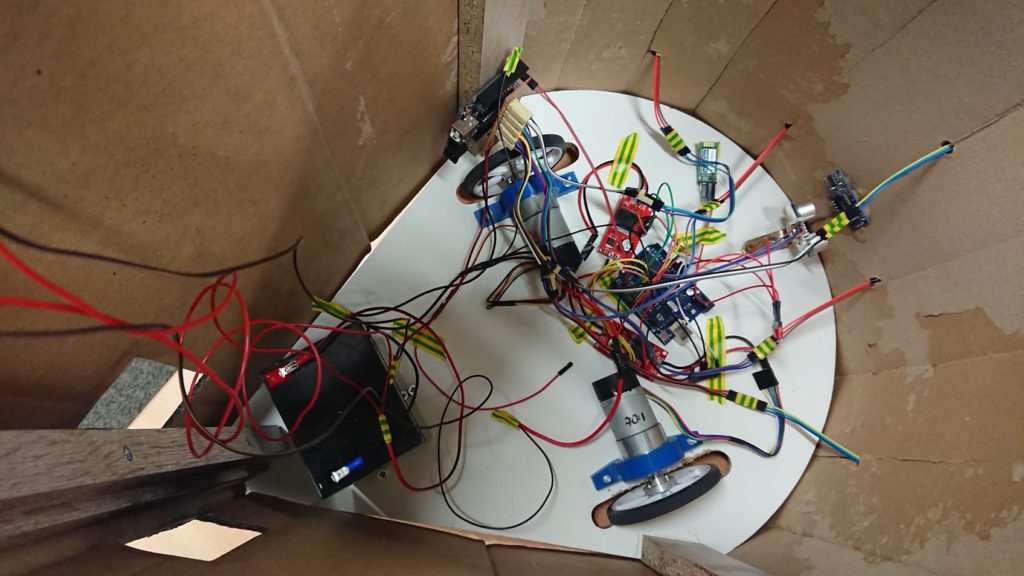
Skorupa (test z kartonu)

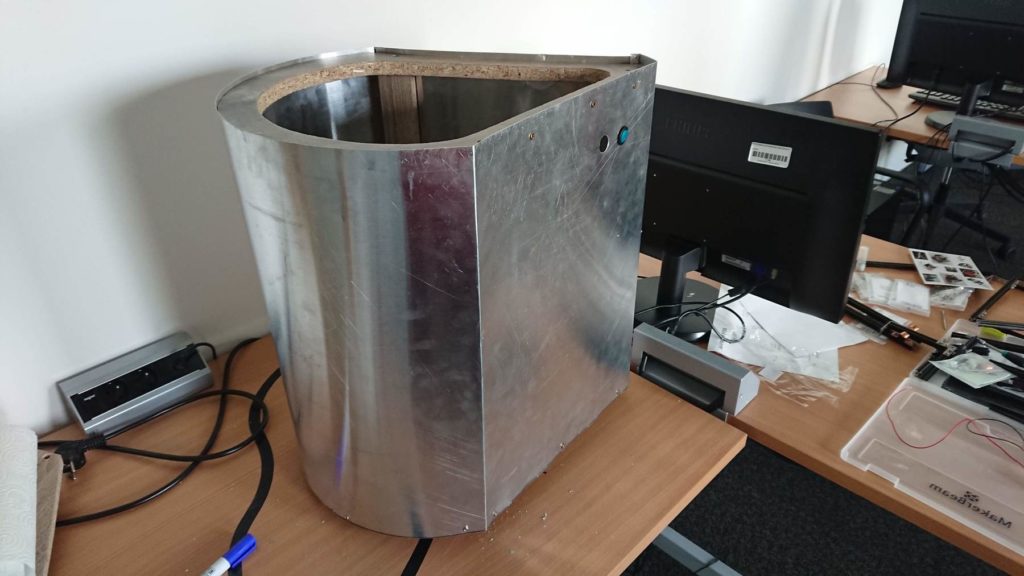
Skorupa – finalna, aluminium 0.5mm
Podkład – przed malowaniem na czarny mat:
Malowanie:

Elektronika i mechanika…

Płyta główna
Niezbędna, bo bałagan panuje w środku. No i gdy skorupa jest nałożona, trudno dostać się do środka.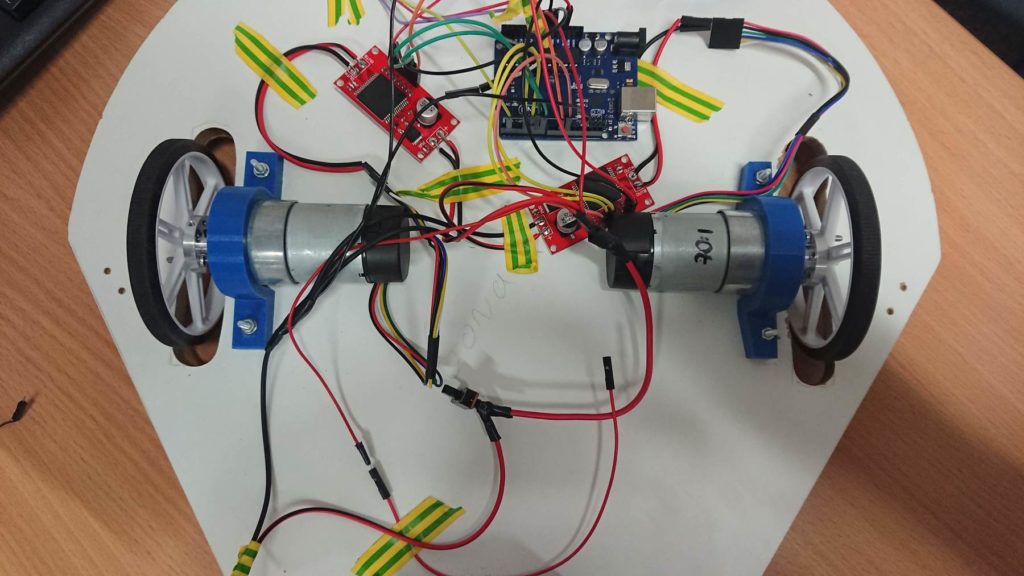
Powstała więc płyta główna: 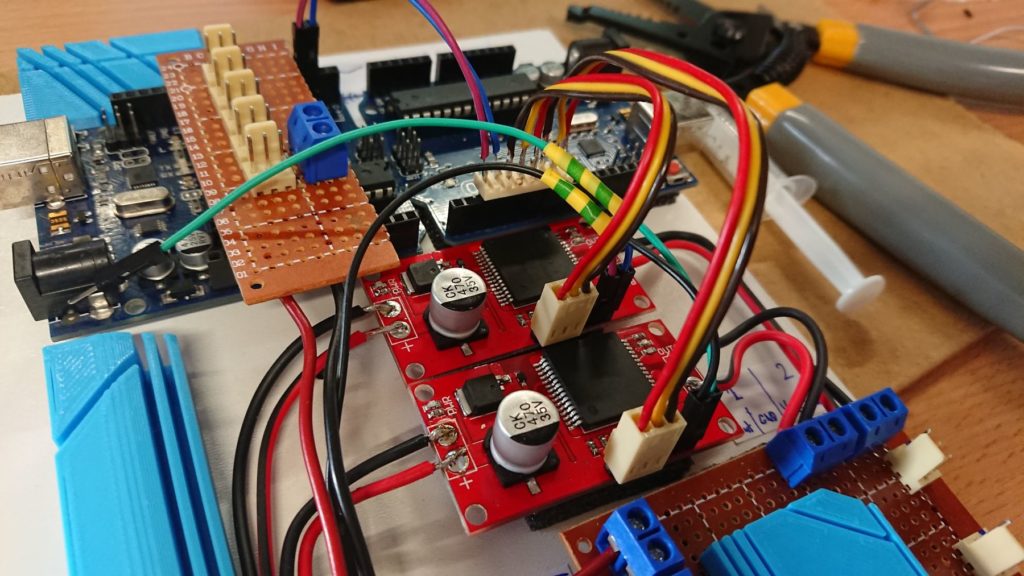
Pomysły na drugi etap
- chłodzenie
- głośniki
- ekran LCD
- głowa? ręce?
- czujniki temperatury, pola magnetycznego, tętna… rozwiązanych sznurowadeł, dziurawej prawej-tylnej kieszeni w podniach, dziurawej lewej-tylnej kieszeni, czujnik zakochanej dziewczyny/chłopaka z otoczenia… kto wie, kto wie… 😉