Zebrała się grupka zainteresowanych osób więc zaczynamy! Spotykamy się we wtroki o godz. 11:30.
mostek H
Poznajemy moduł elektroniczny L298N realizujący mostek H – od czegoś trzeba zacząć 😉 Z zajęć z Podstaw elektroniki wiemy, jak to działa, dlatego teraz wykorzystujemy gotowy moduł L298N.
Rozmawiamy sobie o parametrach tego układu, o jego wadach i zaletach – ale przede wszystkim podłączamy i działamy (teoretyzować sobie można, ale my chcemy działać).
Jeszcze nic nie programujemy, koncentrujemy się na zrozumieniu działania układu w praktyce.
Pan Karol pracuje nad swoim pierwszym projektem – licznikiem rowerowym. Dopiero poznaje podstawy Arduino, więc wszystko jest nowe i ekscytujące!
Liczniki rowerowe to „oklepany” temat. Dużo ich na rynku i mają mnóstwo funkcji. Ale nawet te „profesjonalne” mają (czasami) marudne działanie, polegające na dużym czasie opóźnienia pomiędzy rozpoczęciem jazdy a określeniem prędkości. Wiemy o co chodzi: dojeżdżasz do skrzyżowania, stop, a na liczniku prędkość powoli maleje: 20 km/h.. 17 km/h… 12 km/h… 6 km/h… 0 ! W końcu, po ~3 sek? Ruszasz, i ponownie to samo: jesteś w połowie przejazdu a na liczniku ciągle zero. Dopiero potem licznik „żyje”.
Sposób określenia prędkości jest prosty: umieszczamy magnes na szprysze koła i zliczamy liczbę pojawień się magnesu przy czujce. Dla jednego magnesu gdy zliczymy, np. 10 wystąpień w czasie 1 min to prędkość obrotowa wynosi 60 RPM (Revolutions per minute = obroty na minutę). Mając liczbę zliczeń i znając średnicę koła wyliczamy prędkość liniową.
Wyniki można jednak poprawić dodając więcej magnesów, czyli zliczamy z większą dokładnością. Dla dwóch magnesów i ponownie 10 zliczeń w ciągu 1 min mamy oczywiście prędkość 2x mniejszą, czyli RPM = 30, a tym samym prędkość liniową 2x mniejszą.
Pojawiają się pytania:
Ile magnesów użyć?
Jak długo zliczać pojawienia się magnesów przy czujce pola, zanim poda się wartość prędkości?
Aby znaleźć odpowiedzi na w.w. pytania Pan Karol wykorzystał zestaw pomiary z zajęć z przedmiotu Programowanie Mikroprocesorów i przeprowadził swoje pierwsze, poważne badania 😉
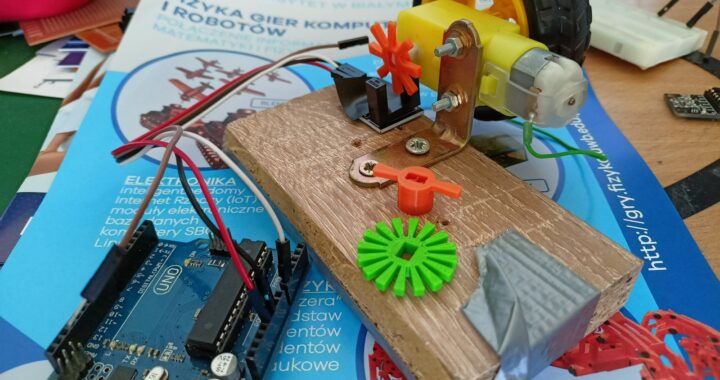
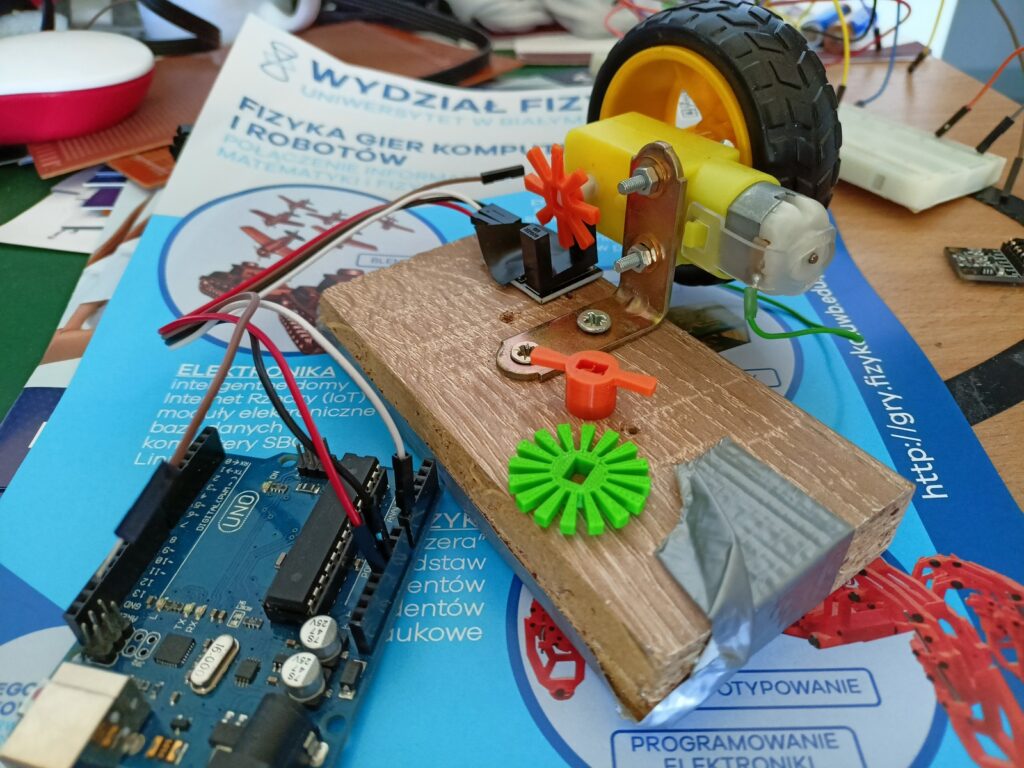
Aby nie komplikować sobie życia i mieć układ pomiarowy pod ręką, najlepiej na biurku – wykorzystane zostały rozetki z różną liczbą ramion jako odpowiedniki różnej liczby magnesów. Aby nie kręcić korbą w rowerze wykorzystano silniczek DC i zasilanie akumulatorowe 6V (w ten sposób wiemy, że rowerzysta równo pedałuje, nie przyspiesza, nie zwalnia, nie zniechęca się…). Rozetki wydrukowano na wydziałowej drukarce 3D (pewnie można wykorzystać kartoniki, ale skoro mamy drukarki – to czemu nie).
Należało więc uruchamiać silniczek, rejestrować liczbę „klików” na czujce szczelinowej w określonym czasie (pół sekundy, sekunda, dwie). Najlepiej robić to wielokrotnie, aby posiadać większą statystykę i mieć dokładniejsze dane. Więc dla danego czasu zliczania 10-20 wyników. A potem należało zmienić rozetkę na inną i powtórzyć całą procedurę. Wyniki zbierano do arkusza:
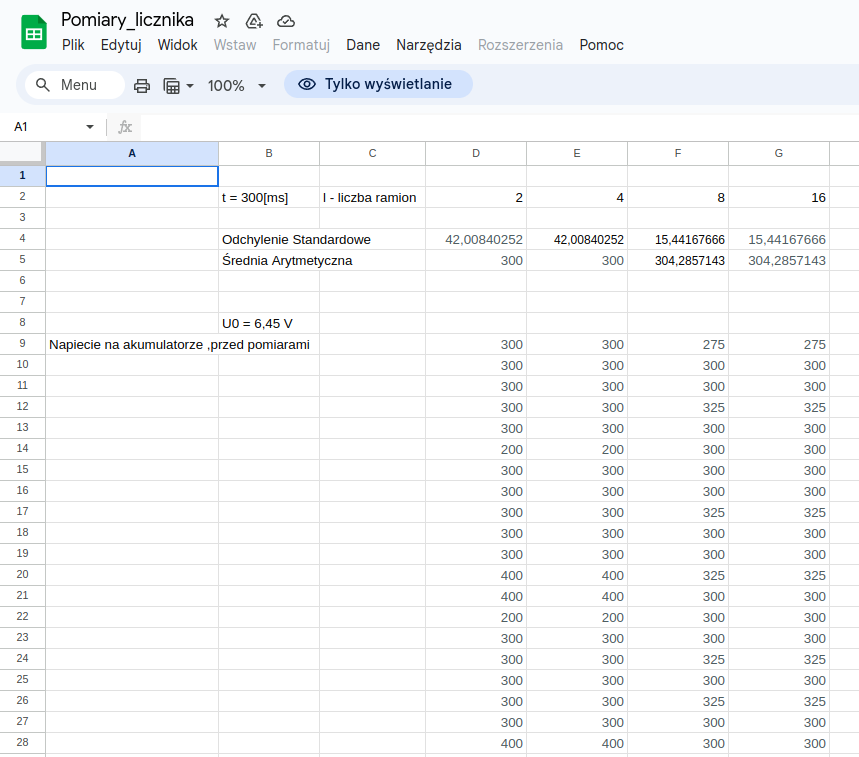
Powyżej przykładowy wynik pomiarów – całkiem konkretny fragment badań Pana Karola! Widać tu wyniki RPM dla rozetki z 2-ma ramionami (kolumna D, a od D9-D28 mamy pojedyncze wyniki przekopiowane z portu szeregowego Arduino UNO). W D5 jest średnia, a w D4 dokładność pomiarów (czyli odchylenie standardowe) z pomiarów zawartych w D9-D28. Potem kolejna rozetka z 4-ma ramionami (kolumna E), kolejna z 8-ma (kolumna F) i jeszcze jedna z 16-toma ramionami (kolumna G). I to wszystko dla czasu pomiaru 300 ms (komórka B2).
Z tych pomiarów widać, że 4 ramiona nie zmieniają dokładności w stosunku do 2 ramiona. Polepszenie następuje dopiero przy zwiększeniu liczby ramion do 8 – ale nie ma co zwiększać więcej – 16 nie robi już różnicy (choć to jednak efekt tylko dla określonej prędkości obrotowej testowanego koła – pewnie dla większej prędkości pojawią się różnice pomiędzy 8 a 16 ramion).
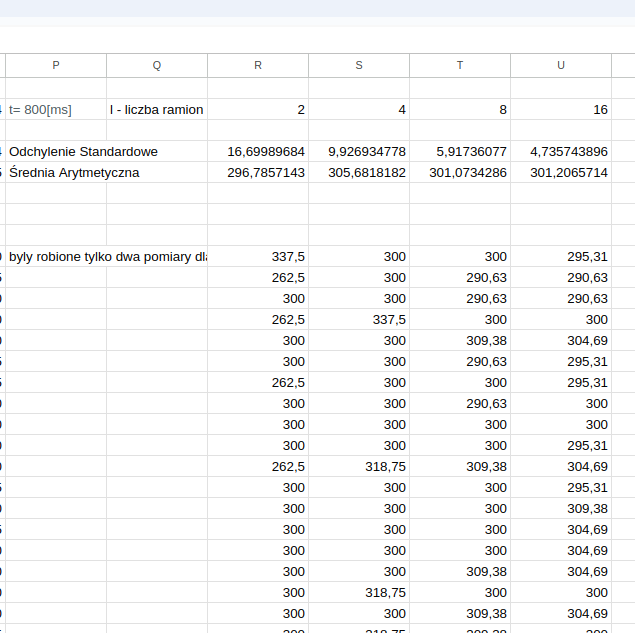
Następnie wydłużamy czas pomiaru (do 800 ms) i powtarzamy badania (zabawę? jak kto woli).
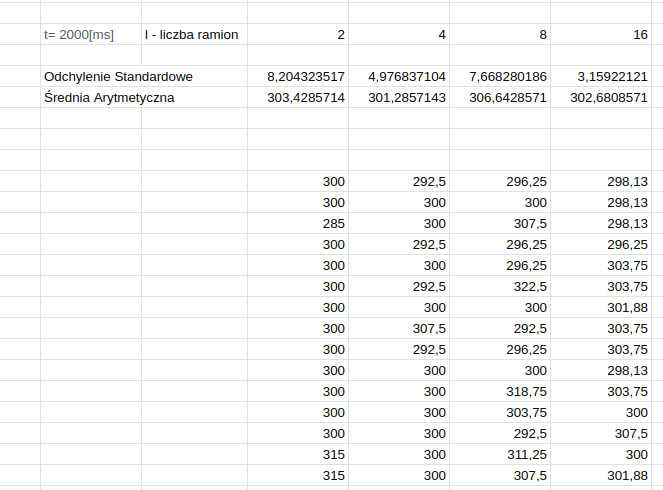
Widać, że dokładność rośnie wraz gdy zwiększamy liczbę ramion rozetki (wiersz „Odchylenie standardowe” — wartości maleją, czyli właśnie rozrzut wokół wartości średniej maleje, tym samym zyskujemy dokładność). Włąśnie tego należało się spodziewać. W tym przypadku dochodzimy mamy już 2% dokładności przy 8-miu ramionach rozetki, a nawet mniej przy 16-tu. Kolejne pomiary dla innego czasu zliczania:
Ostatnia seria danych (dla t=2 sek) jest zaskakująca o tyle, że pojawia się tu dziwny problem – strata dokładności (wzrost odchylenia standardowego) dla 8-miu ramion rozetki. Jak to wytłumaczyć? Okazuje się, że tu koło się jakoś zblokowało i nie pracowało równo – coż, to taki tani chiński silniczek, nic profesjonalnego 😉
Ile ramion rozetki należy użyć, aby mieć szybki i dokładny pomiar prędkości roweru? Trzeba to przeliczyć na prędkość liniową i wykorzystać te wyniki do ostatecznego dobrania czasu zliczania i liczby ramion (czyli magnesów na obręczy/szprysze). CDN.
Zapraszam na nietypowespotkanie organizacyjne koła – ustalimy tematykę, poznamy zainteresowania uczestników oraz wymienimy się pomysłami na tegoroczne projekty.
Zapraszam wszystkich studentów UwB – także tych, którzy jeszcze nie mieli doświadczenia z platformą Arduino (na niej będziemy się koncentrować). Oczekuję otwartości i chęci poznawania nowych rzeczy. Zajrzyj na www koła i przekonaj się, czy Cię to interesuje.
Kiedy? Oczekuję na zainteresowanych Studentów do końca października 2023, w pokoju 2045 (Kampus, Wydział Fizyki), w godzinach pracy (typowo jestem dostępny w godz. 9-16). Ewentualnie można zadzwonić (738 81 98) i się zapowiedzieć. Chodzi o to, aby najpierw zebrać zainteresowanych Studentów, poznać ich preferencje (np. odnośnie terminów spotkań), by następnie coś wspólnie ustalić. Zachęcam!
Pan Rafał Łupiński (student Fizyki Gier Komputerowych i Robotów) zaprezentował się w finałach ZTGK w kategorii „Show your project” jako Samotny Wilk z projektem Zestaw do MOCAP-u. ZTGK to konkurs Zespołowego Tworzenia Gier Komputerowych – cykliczna impreza organizowana przez Politechnikę Łódzką. W tym roku odbyła się już 15-ta edycja.
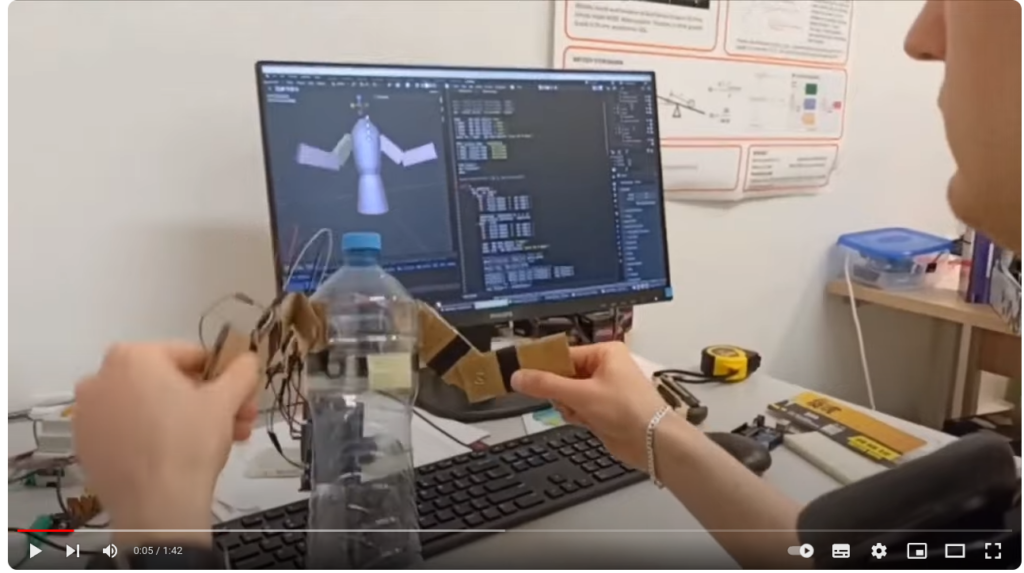
Finał miał miejsce w Łodzi 29.06.2023 r. W kategorii Show your project można przedstawić indywidualne (bądź grupowe) projekty związane w GameDev-em. Pan Rafał wywołał spore zainteresowanie bardzo oryginalnym zestawem do MOCAPu – czyli Motion Capture – zbudowanym na bazie Arduino, czujników żyroskopowych i oprogramowania Blender (programowanym w pythonie) do wizualizacji.
Widoczna na zdjęciu butelka to w rzeczywistości AKTOR – ma ręce, tułów (cóż – nóg nie ma, a głowa to niebieska nakrętka). Aktor obłożony jest czujnikami (2 na ręce, jeden na tułów – razem 5 sztuk w tej wersji prototypu). Najważniejsza cech Aktora – jest MEGA cierpliwy, nie marudzi gdy każe mu się stać z podniesionymi rękoma 😉 nie chce zapłaty za swoje usługi 😉
Można poruszać Aktorem, machać jego rękoma a na ekranie komputera powstaje na żywo obraz. Pan Rafał zakwalifikował się do finału konkursu ZTGK i zyskał spore zainteresowanie + otrzymał ciekawe pomysły na dalsze losy tej pracy (od Jurorów, od innych uczestników). Choć ostatecznie nie zajął podium to liczy się nie tylko sama wygrana, ale i obecność – zaproponowane pomysły są gotowe do skomercjalizowania!
Gratuluję Panu Rafałowi za zaangażowanie w projekt i odwagę uczestnictwa w konkursie. Sponsorem wyjazdu na ZTGK do Łodzi był Dziekan Wydziału Fizyki (zakwaterowanie, przejazd itd) – dziękujemy!
Po raz kolejny wspomagam drużynę z 1LO w Białymstoku w ich udziale w Europejskiej Olimpiadzie Kreatywności Destination Imagination. W tym roku impreza odbywa się w Turcji – wyjazd już w najbliższy poniedziałek, 6.03.2023.
Paweł Andryszak (pierwszy z lewej) oraz cała drużyna omeGANG.
Młodzi ludzie z 1LO pod kierownictwem Pawła Andryszaka (absolwenta Wydziału FIzyki UwB, nauczyciela fizyki w 1LO) wielokrotnie zdobywali nagrody na tej imrezie (ostatnio Global Finals USA 2022 gdzie zajęli 2-gie miejsce w Instant challenge i 6-te miejsce w Team challenge). A jak będzie w tym roku?
Zdalnie-sterowany pojazd – autorstwa omeGANG.
Drużyna omeGANG jako część zadania konkursowego pracowała nad zdalnie-sterowanym pojazdem, który ma „chwytaki” do układania puzli (dość dużych przedmiotów). Bardzo pomysłowa konstrukcja wykonana jest ze sklejki, a do sterowania wykorzystano platformę Arduino. Do transmisji bezprzewodowej użyto popularne moduły nRF24, które… okazały się kapryśne! Pytanie: czemu pojazd ma „czkawkę”? czemy trzęsie przednimy chwytakami w nieokreślony sposób? Czy delikatne moduły nRF szwankują? Fajny projekt, ale nie działa tak, jak powinien, Więc?
Problem okazał się leżeć nie w hardware (który drużyna dobrze przygotowała), ale w oprogramowaniu! Kod do obsługi nRF24 znaleziony w internecie a następnie zmodyfikowany przez licealistów działał, ale… bardzo słabo. Na szczęście po dwóch godzinach wspólnej pracy udało się stworzyć lepszy, dużo lepszy program i „czkawka” znikła 😉 Trzeba jeszcze wymienić jedno serwo oraz przygotować płytę główną (aby unikanąć przypadkowych rozłączeń przewodów) ale jest już dobrze. Czas jednak goni (dziś czwartek, a wyjazd w poniedziałek!).
omeGANG jest jedyną drużyną, która będzie reprezentować Polskę na zawodach Destination Imagination. Białostoczacie – trzymam za nich kciuki !
Trwają prace nad projektem huśtawki (nowe wydruki 3D – niby ulepszające konstrukcję, choć sterowanie PID się rozregulowało…) oraz nad tworzeniem własnych płytek PCB na frezarce CNC.
(c) K.G. 2022
PS. termin spotkań to poniedziałki 13.15 (13.30) – 15.00
Zapraszam na spotkanie organizacyjne koła. Ustalimy godziny regularnych spotkań, tematykę, poznamy zainteresowania uczestników oraz wymienimy się pomysłami na tegoroczne projekty. Zapraszam wszystkich studentów UwB – także tych, którzy jeszcze nie mieli doświadczenia z platformą Arduino (na niej będziemy się koncentrować). Oczekuję otwartości i chęci poznawania nowych rzeczy. Zajrzyj na www koła i przekonaj się, czy Cię to interesuje.
Kiedy? czwartek 27.10.2022 r. godz. 16:00 , sala 1064 Wydział Fizyki (Kampus UwB)
(c) K.G. 2022
PS. termin spotkania organizacyjnego nie jest terminem regularnych spotkań, no chyba, że tak ustalimy. Przyjdź i sam zaproponuje inny termin!
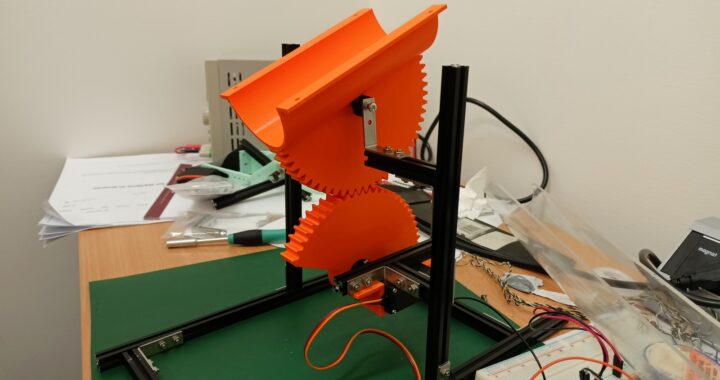
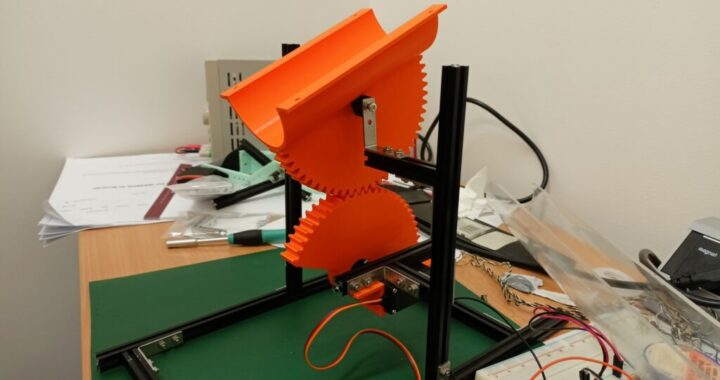
Pan Stanisław postanowił zmienić mechanikę systemu sterowania pochylnią – przygotował i wydrukował nowe elementy, dziś odbyło sie złożenie całości i pierwsze udane! próby.
Wydruk z zakupionego filamentu dzięki finansowaniu Parlamentu Studenckiego UwB.
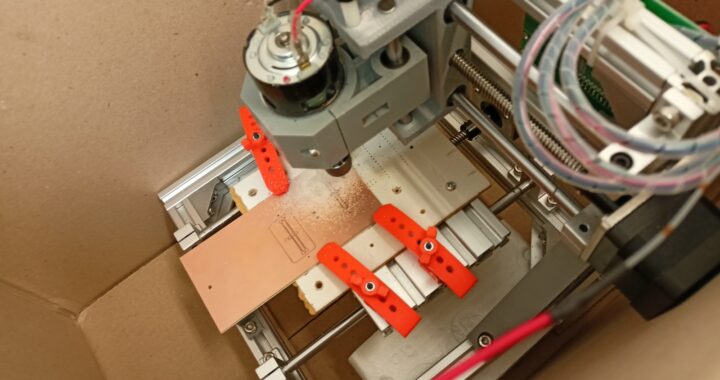
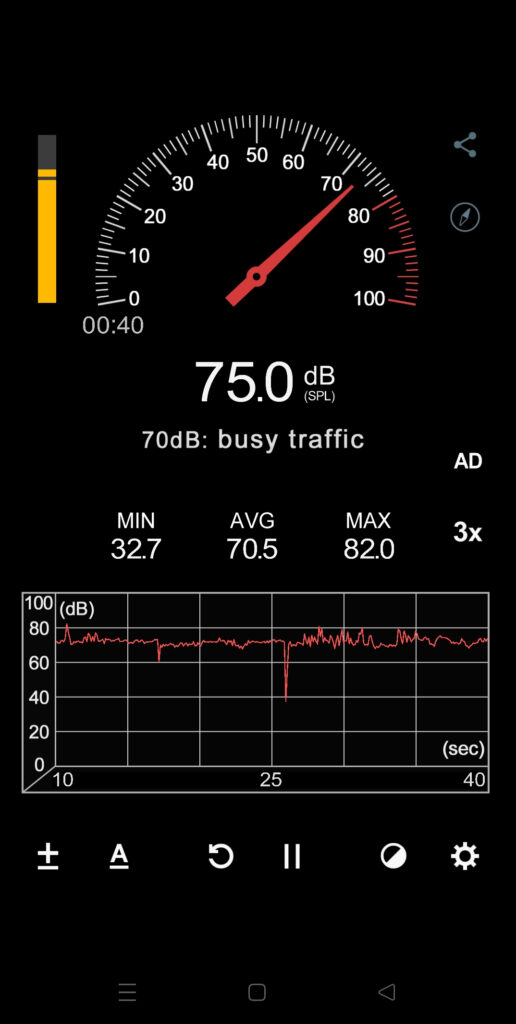
Prace trwają… każdy sobie rzepkę skrobie 😉 Niebawem się okaże, co z tego wyjdzie 😉 A na zdjęciu maszyna CNC w kartonie, bo właśnie testowane są frezy do cięcia „na wylot” PCB i trochę dużo tego pyłu…. Dzięki umieszczeniu frezarki w pudle zaoszczędzamy trochę na sprzątaniu, za to cierpi ucho – pudło rezonuje, hałas około 75 dB (czyli sporo!). No cóż – coś za coś:
Maszyna CNC w kartonowym pudle mocno rezonuje – jest głośno: