- podstawy (PWM, serwo silnik)
- 3x czujka TCRT5000: Pan Bartek zlutował sobie moduł i zbudował PIERWSZEGO line followera (GRATULUJĘ!):
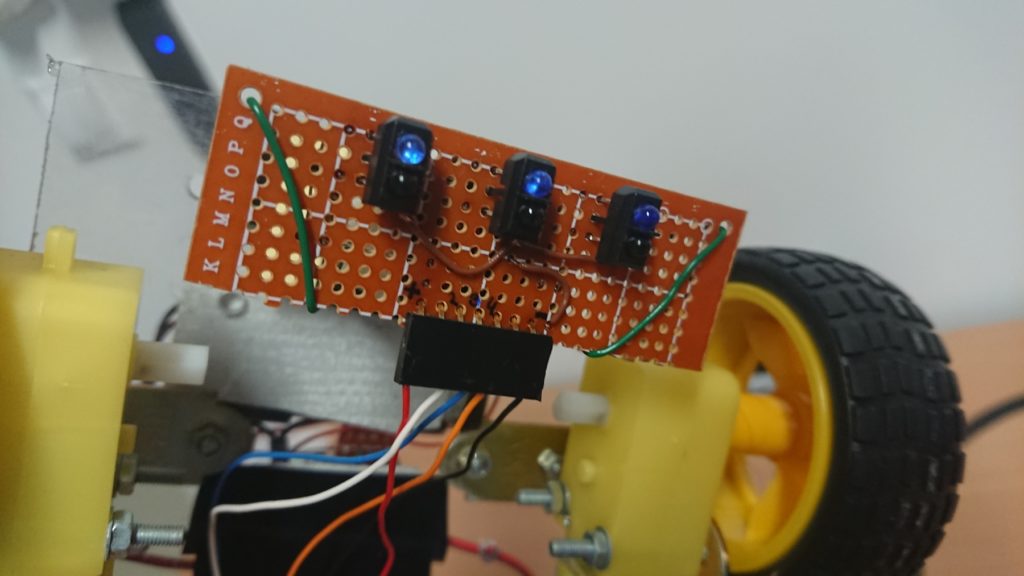
- powyżej zastosowano nowatorskie rozwiązanie: czujki TCRT działają CYFROWO, ale zapamiętywana jest HISTORIA pomiarów (cyklicznie, 10 odczytów) a DECYZJA o zwrocie robocika podejmowana jest na podstawie UŚREDNIENIA historii – ciekawe rozwiązanie! Wszystko jest raczej tymczasowe, bo jest zamiar przeprogramowania układu – odczytywanie czujek analogowo, co poprawi dynamikę robota. Problemy techniczne – toporne koła i silniki – rozwiązujemy przez wymianę podzespołów na inne (zestaw silniczków i kół Pololu – niebawem w akcji)
(c) K.G. 2018