Konwerter analogowo cyfrowy (DAC)
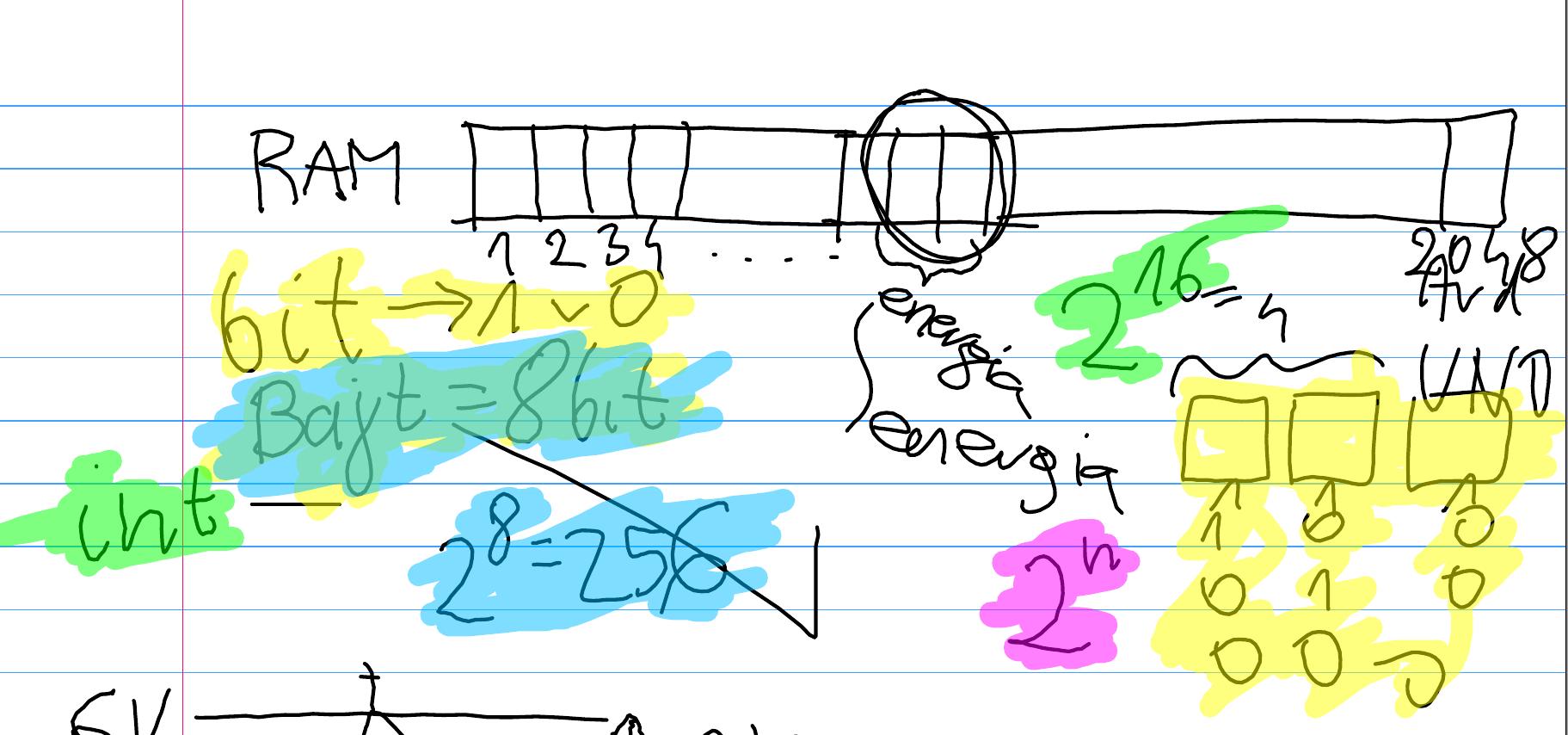
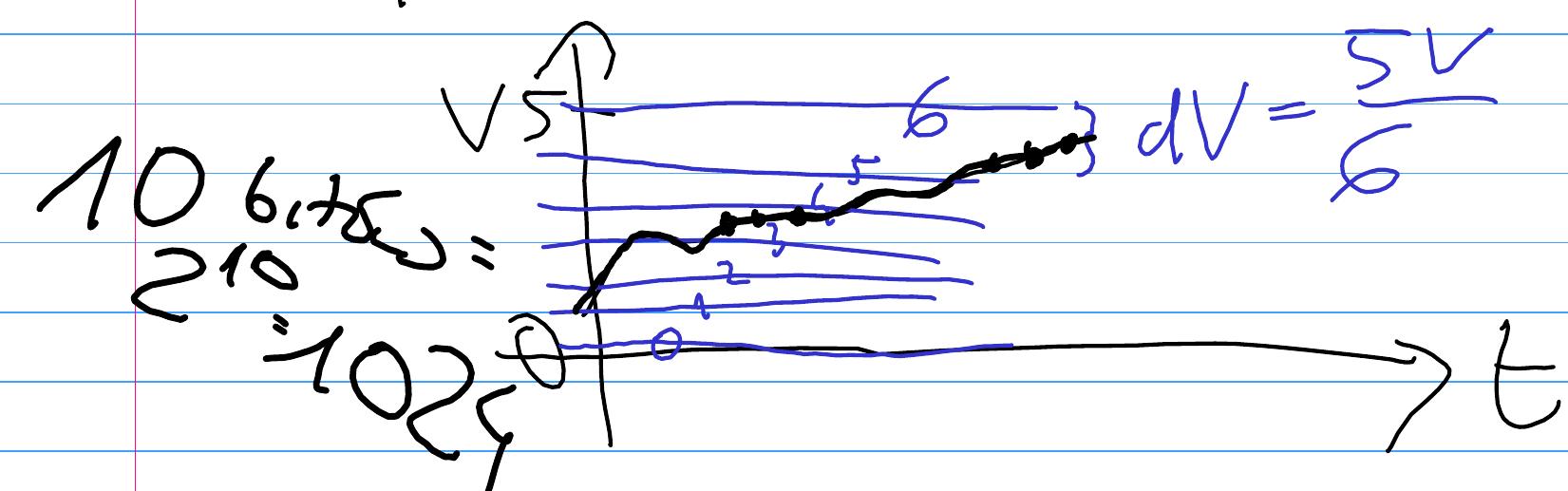
Sygnały analogowe to takie sygnały elektroniczne, które możemy zapisywac nie tylko jako 0 lub 1 (tak/nie, prawda/fałsz – tylko dwie wartości), ale w wielu „odcieniach” – w końcu pomiędzy zerem a jedynką jest nieskończenie wiele liczb. Oczywiście w informatyce wszystko musi byc skończone, tak więc tych „odcieni” (poziomów pomiędzy zerem a jedynką) jest skończona liczba. Układ zamianiający sygnał elektroniczny na informację cyfrową nazywa się konwerter analogowo cyffrowy (DAC) i mówiąc o nim podajemy jego zakres – liczbę bitów. Dla 8-bitowego DACa mamy wartości sygnału analogowego z przedziału od 0..255 (256 poziomów = 2^8), natomiast w przypadku 10-bitów 0..1023 (1024 poziomy = 2^10).
Potencjometr

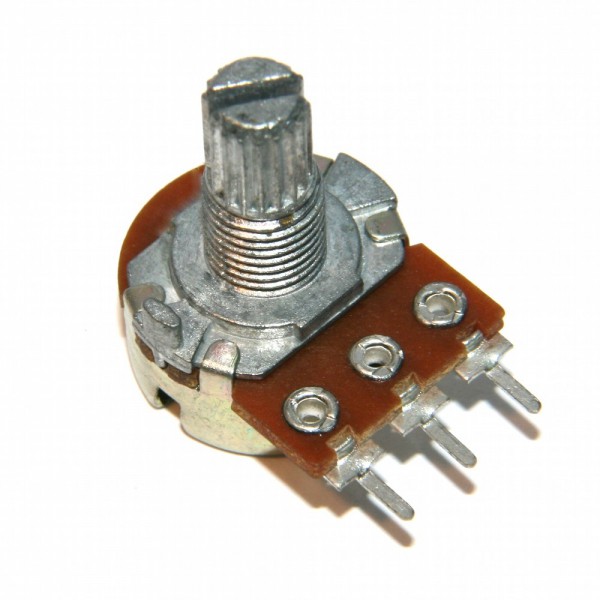
Wygląda dość topornie – ale jeśl macie w domu zbyteczną gałkę z kryształów Swarowskiego to proszę śmiało przynieść i uatrakcyjnimy wygląd tego podzespołu elektronicznego 😉 Trzeba pamiętać o sposobie podłączania go do budowanych układów. Widzimy trzy nóżki więc:
- jedna skrajna nóżka (nie ma różnicy która) powinna być podłączona do masy (nazwijmy ją GND i oznacza napięcie zero V)
- druga skrajna nóżka musi być podłączona do danego napięcia, nazwijmy je VCC
- środkowa nóżka będzie „wyprowadzać” napięcie od zera do VCC w zależności od ustawienia pokrętła na potencjometrze.
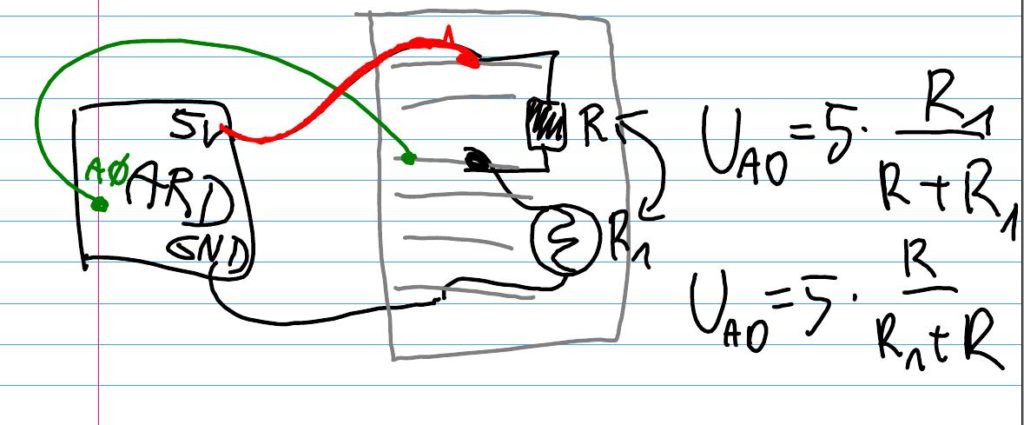
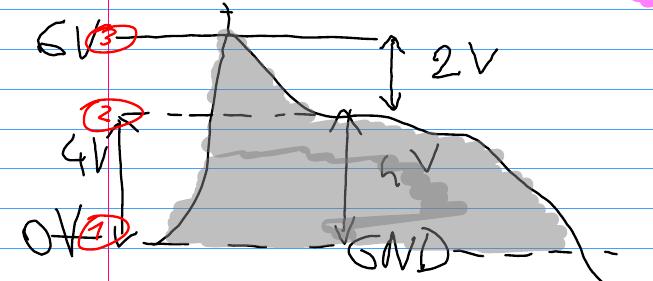
Na zajęciach dość szczegółowo omówiłem budowę potencjometru i zasadę jego działania – dzielnik napięć – ale do tego jeszcze obiecuję wrócić. Na razie skupmy się na powyższych informacjach jak potencjometr łączymy w układ. Jako przykład możemy podłączyć „minus” bateryjki AAA do pierwszej nóżki, „plus” do trzeciej „nóżki”, wówczas z pinu numer dwa otrzymamy napięcie od 0..1.5V. Innym przykładem podłączenia jest wykorzystanie Arduino i pinów GND (podłączamy do pinu 1 na potencjometrze) oraz 5V (do pinu 3 na potencjometrze) – wówczas mamy kontrolę potencjometrem nad napięciem 0..5V (pin 2 na potencjometrze).
Pinem #2 z potencjometru możemy zasilać jakiś układ – sprawdzaliśmy to z LED-em wpiętemym pomiędzy piny #1 (GND) i #2(0..3.3V) potencjometru, lub mozemy podłączyć pin #2 do wejścia A0 w Arduino – wówczas odczytamy wartość napięcia ustawionego potencjometrem jako liczbę z przedziału 0..1023 (Arduino UNO ma DAC 10-bitowy).
Kalibracja
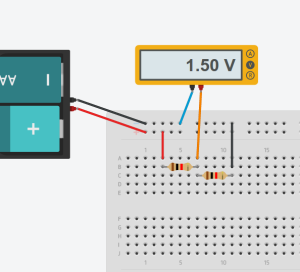
Konieczne jest sprawdzenie poziomu napięcia 5V w Arduino – może się zdarzyć, że nasza płytka jest uszkodzona lub producent nie trzymał standartów i zamiast 5V mamy 5.1V. To spora różnica. W przypadku uszkodzonych płytek – których wcale nie ma co wyrzucać – napięcie zamiast 5V może być nawet 4.5V co jest już ogormną różnicą! Dlatego konieczne jest sprawdzenie multimetrem wartości napięcia produkowanego przez Arduino z pinu 5V.
Odczytywanie sygnału – analogRead
void setup(){
Serial.begin(9600);
}
int odczyt;
void loop(){
odczyt = analogRead(A0);
Serial.print("Odczytalem ");
Serial.print(odczyt);
Serial.print(" ---> ");
Serial.print(odczyt*4.9/1024);
Serial.println(" [V] ");
}
Ten prosty program odczytuje sygnał podłączony do pinu A0 w Arduino (możesz wybrac inne wyjścia: A1,A2…A5) i wypisuje jego wartość jako liczbę z przedziału 0..1023 (gdyż Arduino UNO ma przetwornik DAC 10-cio bitowy, czyli 2^10=1024) a także podaje wartość w woltach. Sprawdziłem, że w moim Arduino napięcie z pinu 5V wcale nie wynosiło 5V a 4.9V i dlatego linia #10 zawiera właśnie takie przeliczenie na wolty. Zwróć też uwagę na sposób komunikowania się z ekranem – budowanie napisu w jednej linii i dopiero na koniec użycie funkcji Serial.println().
Posługują się powyższym programem najpierw sprawdzamy odczytywane napięcie z pinu 3.3V Arduino, potem 5V Arduino – porównując wartości wypisywane na ekranie z multimetrem. Potem możemy użyć jakiś baterii a w końcu wykorzystać potencjometr i jego środkowy pin.
PWM (cyfrowe piny z „tyldą” ~)
PWM to szybkozmienny sygnał cyfrowy (cyfrowy, a więc tylko dwie wartości: 0V oraz 5V). Szybkozmienny oznacza naprawdę szybkie zmiany, 500x na sekundę – czyli co 2ms! Musimy podać jaki ułamek czasu (z przedziału 2ms) będzie napięciem wysokim (5V) a wówczas pozostały czas będzie napięciem 0V. Ten ułamek czasu musimy wyrazić jako liczbę całkowitą z przedziału 0..255 (gdzie 255 to 100%) gdyż w Arduino UNO piny PWM są 8-bitowe (a 2^8=256). Wartość 0..255 nazywa się to wypełnieniem sygnału.
Sterowanie wypełnieniem – analogWrite
void setup(){
pinMode(3, INPUT);//pin cyfrowy z tyldą = PWM
}
void loop(){
analogWrite(3, 0);
delay(5000);
analogWrite(3, 100);
delay(5000);
analogWrite(3, 200);
delay(5000);
analogWrite(3, 255);
delay(5000);
}
Powyższy program wybiera pin #3 Arduino UNO (zwróć uwagę, że jest on onzaczony „tyldą” na płytce – czylli jest to pin PWM, ale można wybrac inne piny PWM) i steruje jego wypełnieniem. W tym celu używamy funkcji analogWrite(int,int) podając numer pinu którego ma dotyczyć zmiana (koniecznie pin z tyldą!) oraz wartość wypełnienia (koniecznie z przedziału 0..255). Co 5 sekund zmienia jego wartość, którą możemy odczytać na multimetrze – ale uwaga, będzie to tylko wartość średnia! Aby zobaczyć zmiany napięcia w okresach 2ms należało by użyć oscyloskopu.
Praca domowa
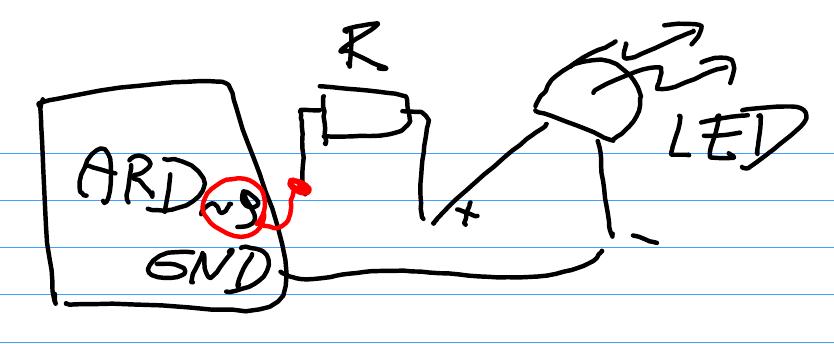
Wykorzystując informacje z dzisiejszych zajęć uruchomić wirtualne Arduino i zbudować program z potencjometrem, który steruje jasnością LED-a. Musimy więc odczytywać wartości z potencjometru a następnie odpowiednio sterować zasilaniem LED-a. Powodzenia!
(c) KG, 2017
 Czyli silnik, który obraca się od 0 do 180 stopni (ma blokadę na inne wychylenia). Potem utrzymuje swoją pozycję. Służy do tworzenia obrotowych ramion itd…
Czyli silnik, który obraca się od 0 do 180 stopni (ma blokadę na inne wychylenia). Potem utrzymuje swoją pozycję. Służy do tworzenia obrotowych ramion itd…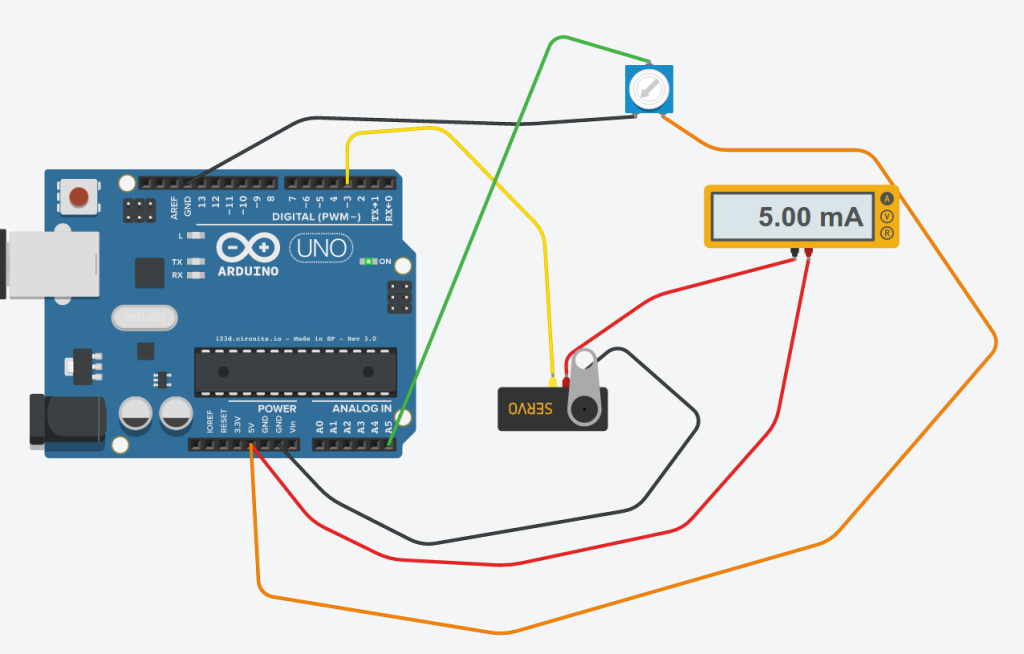
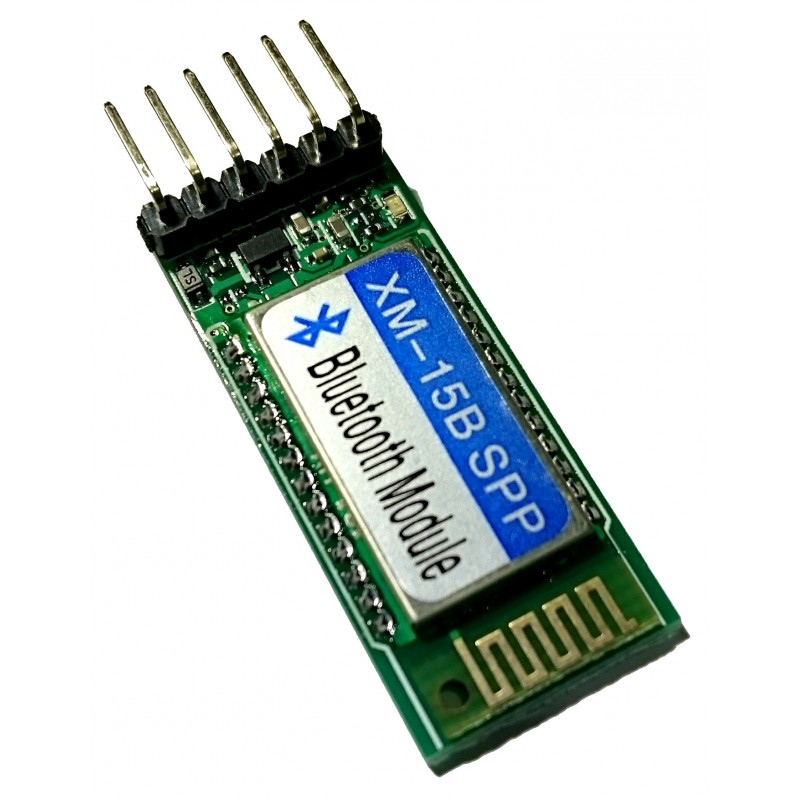 Dlaczego ten? Bo działa w zakresie 3-6V, czyli można go bezpiecznie podłączyć do Arduino. Inne modele – popularne HC-05, HC-06 komunikują się przez 3.3V i wymagają „zbijania” napięcia (np. dzielnikiem napięć). To proste, ale… po co się w to bawić, jak można kupić właśnie moduł pozbawiony tej uciążliwości? Praujemy więc z XM-15B.
Dlaczego ten? Bo działa w zakresie 3-6V, czyli można go bezpiecznie podłączyć do Arduino. Inne modele – popularne HC-05, HC-06 komunikują się przez 3.3V i wymagają „zbijania” napięcia (np. dzielnikiem napięć). To proste, ale… po co się w to bawić, jak można kupić właśnie moduł pozbawiony tej uciążliwości? Praujemy więc z XM-15B.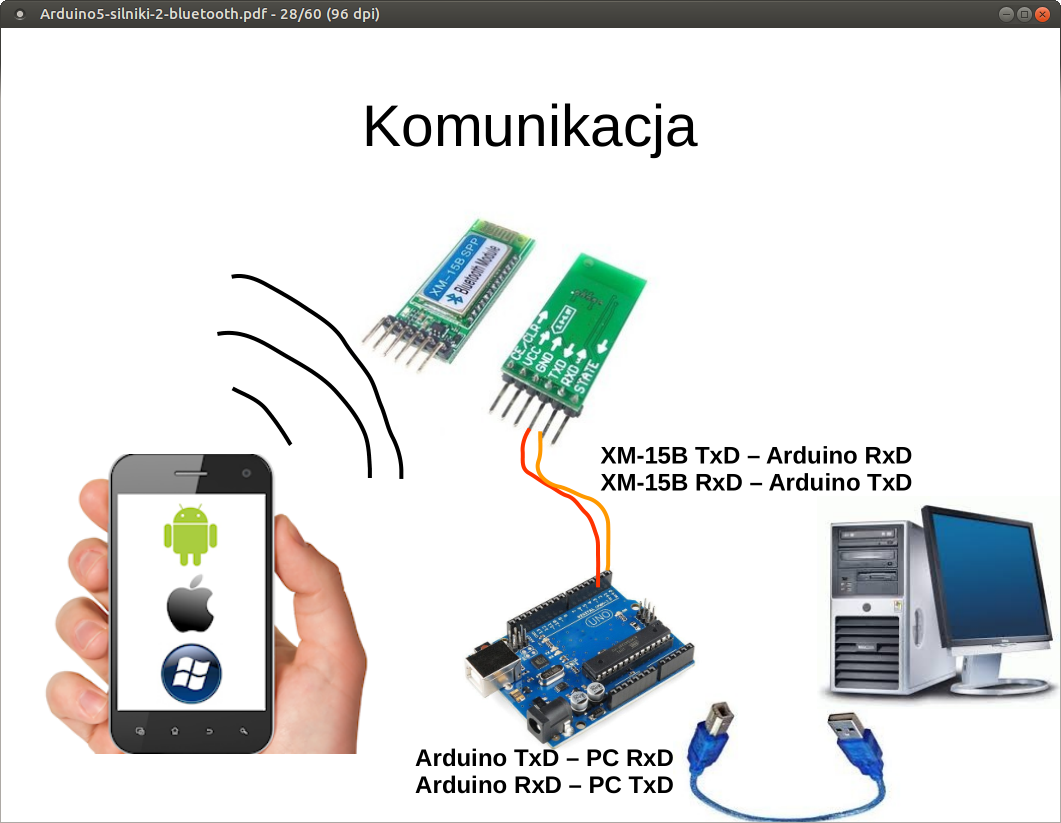
 Na spotkaniu poznawaliśmy
Na spotkaniu poznawaliśmy 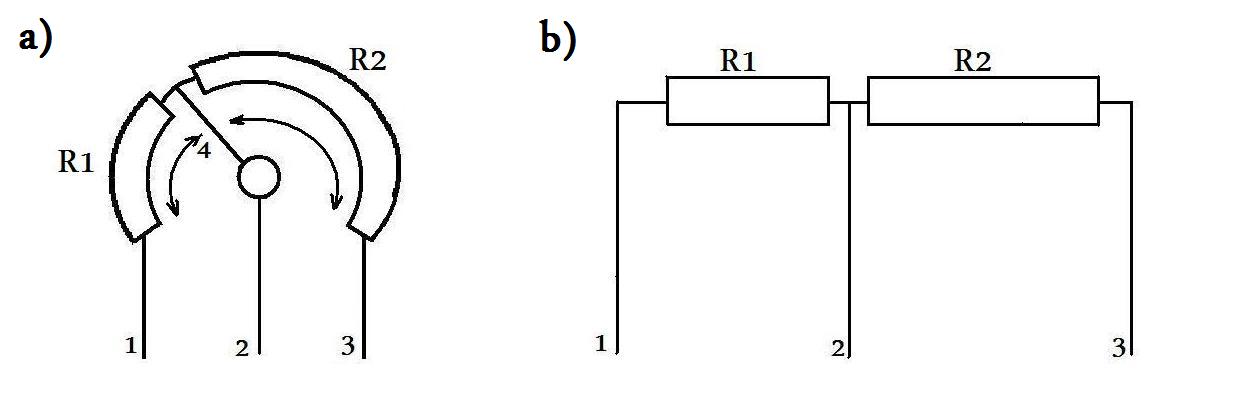


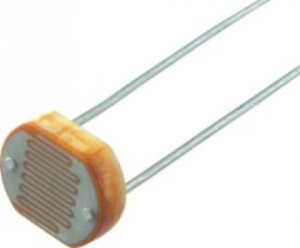
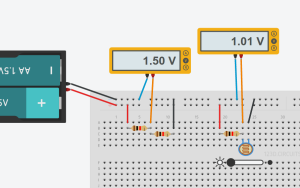
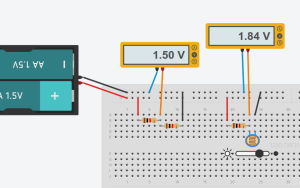
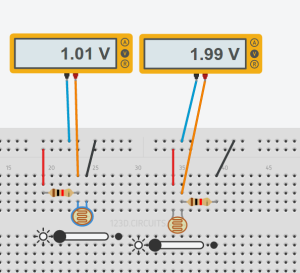
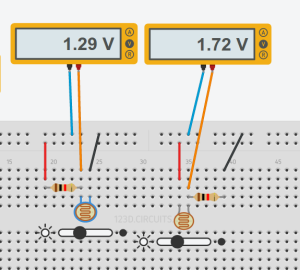
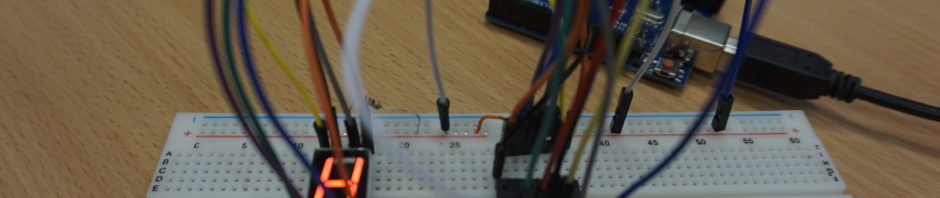
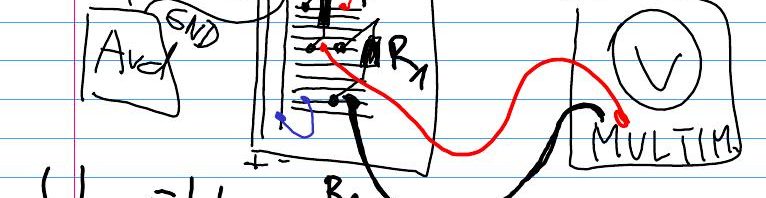
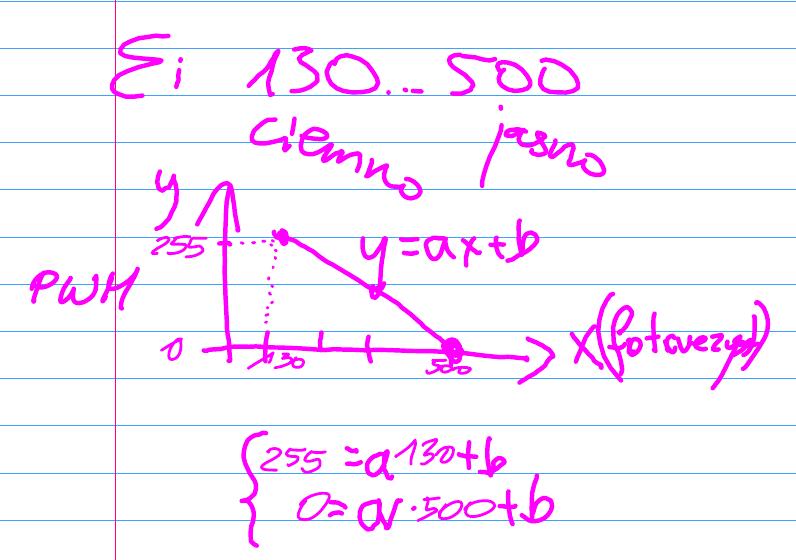
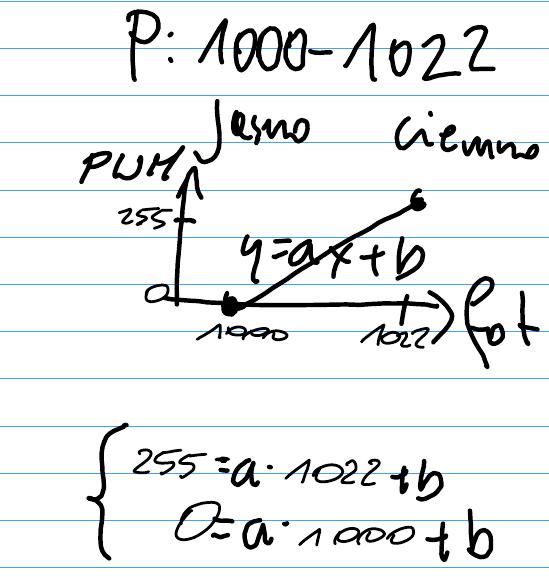
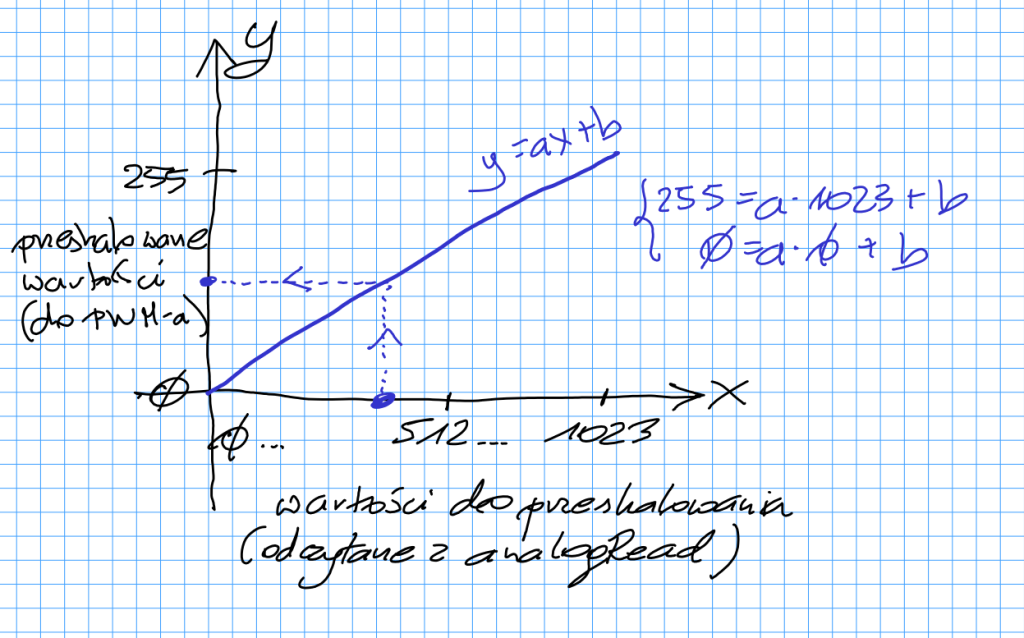
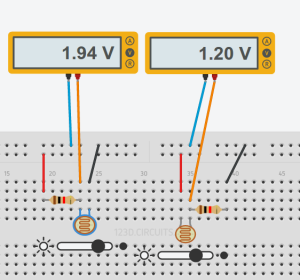 Czyli w jednej konfiguracji napięcie rosło oświetlając dzielnik, w drugiej – napięcie malało. Najpierw każdy z nas ustalił więc, co ma na swojej płytce aby kontrolować swój układ.
Czyli w jednej konfiguracji napięcie rosło oświetlając dzielnik, w drugiej – napięcie malało. Najpierw każdy z nas ustalił więc, co ma na swojej płytce aby kontrolować swój układ.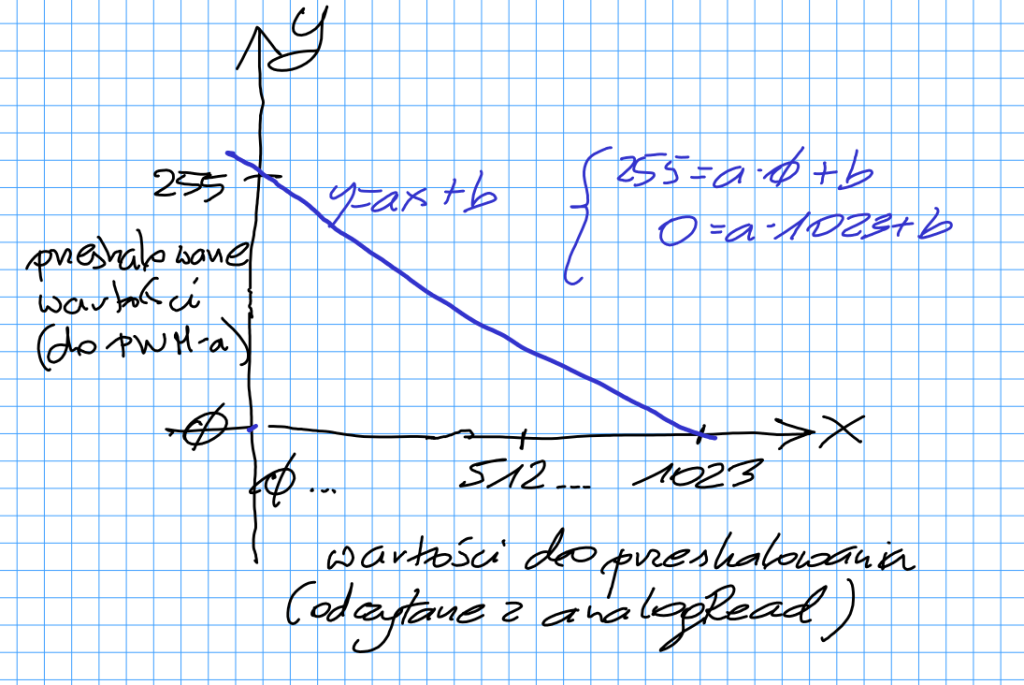
 Poznaliśmy też serwa obracające się „w kółko”, ale z kontrolą szybkości swoich obrotów. Sterowanie polegało na używaniu funkcji writeMicroseconds(), w której komenda STOP dla silnika wymagała podania wypełnienia 1500 ms, natomiast wypełnienie z zakresu 1501-2000 ms oznaczało obrót w prawą stronę z prędkością proporcjonalną do tego wypełnienia (i analogicznie z obrotami w lewą stroną – wypełnienie z przedziału 1000-1499 ms).
Poznaliśmy też serwa obracające się „w kółko”, ale z kontrolą szybkości swoich obrotów. Sterowanie polegało na używaniu funkcji writeMicroseconds(), w której komenda STOP dla silnika wymagała podania wypełnienia 1500 ms, natomiast wypełnienie z zakresu 1501-2000 ms oznaczało obrót w prawą stronę z prędkością proporcjonalną do tego wypełnienia (i analogicznie z obrotami w lewą stroną – wypełnienie z przedziału 1000-1499 ms).
 Prosta w obsłudze czujka ruchu. Trzy piny – zasilanie, masa oraz wyjście. W przypadku wykrycia ruchu wyjście jest w stanie wysokim (5V) przez chwilę (można sterować tym czasem), a gdy ruchu brak – wyjście przechodzi w stan niski (0V). Aby to odczytać przy pomocy Arduino poznaliśmy dwie nowe rzeczy:
Prosta w obsłudze czujka ruchu. Trzy piny – zasilanie, masa oraz wyjście. W przypadku wykrycia ruchu wyjście jest w stanie wysokim (5V) przez chwilę (można sterować tym czasem), a gdy ruchu brak – wyjście przechodzi w stan niski (0V). Aby to odczytać przy pomocy Arduino poznaliśmy dwie nowe rzeczy:
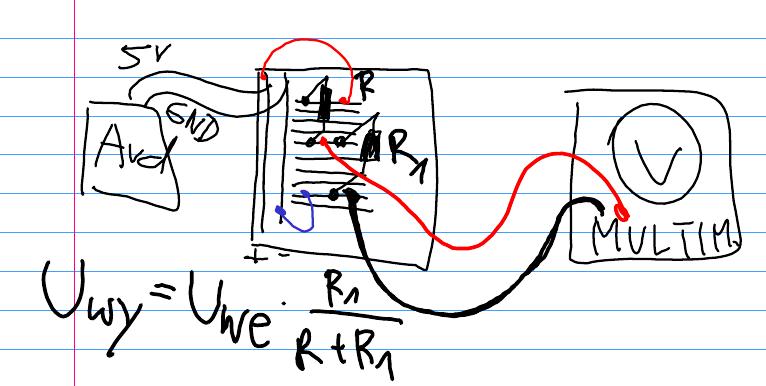
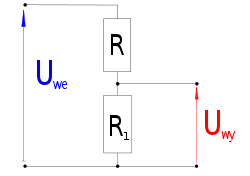
 Bardzo przydatny element elektroniczny – będziemy go wielokrotnie wykorzystywać. Dlatego przypominam, że działanie oparte jest na dzielniku napięć, i należy pamiętać roli 3 nóżek tego elementu (proszę nie nazywać pinów „bolcami” – to mało profesjonalne):
Bardzo przydatny element elektroniczny – będziemy go wielokrotnie wykorzystywać. Dlatego przypominam, że działanie oparte jest na dzielniku napięć, i należy pamiętać roli 3 nóżek tego elementu (proszę nie nazywać pinów „bolcami” – to mało profesjonalne):
 Bardzo przydatny element elektroniczny – będziemy go wielokrotnie wykorzystywać. Dlatego przypominam, że działanie oparte jest na dzielniku napięć, i należy pamiętać roli 3 nóżkek tego elementu:
Bardzo przydatny element elektroniczny – będziemy go wielokrotnie wykorzystywać. Dlatego przypominam, że działanie oparte jest na dzielniku napięć, i należy pamiętać roli 3 nóżkek tego elementu: