Serwo silnik (a właściwie mikro-serwo)
 Czyli silnik, który obraca się od 0 do 180 stopni (ma blokadę na inne wychylenia). Potem utrzymuje swoją pozycję. Służy do tworzenia obrotowych ramion itd…
Czyli silnik, który obraca się od 0 do 180 stopni (ma blokadę na inne wychylenia). Potem utrzymuje swoją pozycję. Służy do tworzenia obrotowych ramion itd…
Trzy przewody – zasilanie (czerowny +5V, czarny/brązowy GND) oraz jeden sterujący – musi być PWM. Za dużo nie wnikałem o co chodzi w sterowaniu tym silnikiem, tylko wspomniałem o potencjometrze wewnątrz i o wypełnieniu sygnału sterującego… więcej może później? Zobaczymy.
Do sterowania tym silnikiem użyliśmy 2 nowych funkcji z nowej biblioteki:
- #include <Servo.h> – na początku programu informujemy, że chcemy funkcje z tej nowej biblioteki
- Servo silniczek; tworzymy zmienną typu silnik-serwo, czyli właśnie o to nam chodzi!
- silniczek.attach(3); powoduje przekazanie informacji do Arduino, że sterujemy silnikiem przez pin numer 3 (przypominam: musi być to pin PWM, czyli jak nie 3, to 5,9…)
- silniczek.write(133); ustawia nasz silnik w pozycji 133 stopni. Albo na dowolny inny z zakresu 0..180 stopni. Dziecinie proste 😉
Serwo sterowane z klawiatury
Przypomnieliśmy sobie jak odczytywać liczby z klawiatury (funkcja parseInt() dla obiektu Serial) i stworzyliśmy program ustawiający silnik w pozycji wczytanej z klawiatury. Proste a przyjemne. No i zawsze warto powtarzać wiedzę 😉
Serwo sterowane potencjometrem
Połączenie poprzednich zajęć – potencjometr liniowy (dzielnik napięć!) wykorzystany do ustawiania pozycji serwa – ruszam „gałką” w lewo, orczyk w serwie obraca się w lewo. Tak samo w prawo. Fajne!
Serwo sterowane potencjometrem – program PRO
Dbamy o szczegóły – i nie chcemy ustawiać położenia serwa wówczas, gdy potencjometr nie zminił swojej pozycji. Bez złośliwości – my staramy się programować na serio!
Prąd „zjadany” przez serwo – mierzymy!
W skrajnych ustawieniach serwa (tj. w okolicy 0 stopni, oraz w okolicach 180 stopni) słyszymy buczenie/piszczenie serwo-silnika. Coś się dzieje. Amperomierz w garść i mierzymy prąd.
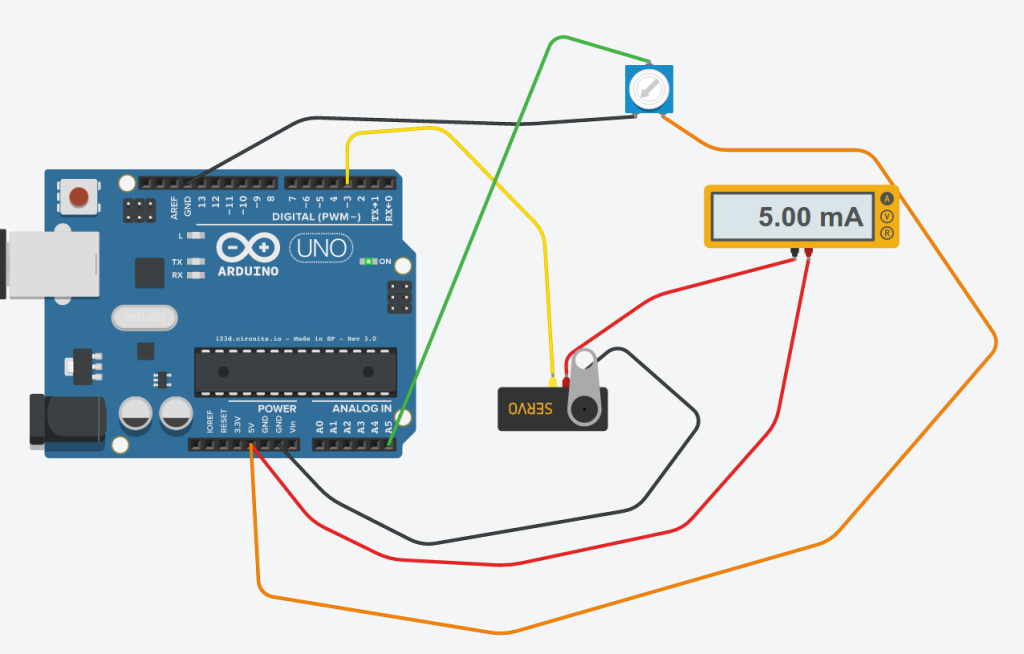
Przyjrzyj się uważnie obrazkowi i zwróć uwagę, jak podłączony jest amperomierz.
Oczywiście w wirtualnym Arduino (ciągle polecam circuits.io) silniczek serwo jest idealny i nie widzimy tego, co było u nas na zajęciach….
Dodatkowo: w przypadku mierników uniwersalnych ustaw największą wartość prądu, jaką się spodziewasz dostać – nie odwrotnie! W przeciwnym przypadku zwiększając zakres przepalisz bezpiecznik w multimetrze…
Funkcja map()
Czyli skalowanie wartości z jednego zakresu na drugi zakres. Przykład, z którym my się bawiliśmy: serwo silniczek sterowany potencjometrem. Odczytujemy nastawy potencjometru z portu analogowego Arduino jako liczbę (nazwijmy ją x) z zakresu 0..1023, a następnie ustawiamy serwo w położeniu z zakresu 0..180 stopni (nazwijmy te stopnie y). Czyli musimy dokonać zamiany wczytaj liczby x na y. Na zajęciach pokazałem skalowanie funkcją liniową, rozwiązaliśmy ten układ równań, ale Arduino jest także dla tych co tego nie umieją zrobić i przygotowało funkcję map(). W naszym przypadku będzie to:
y=map(x, 0, 1023, 0, 180);
Należy pamiętać, że funkcja map() działa tylko na liczbach całkowitych (int).
Serwo sterowane przez Androida – bluetooth XM-15B
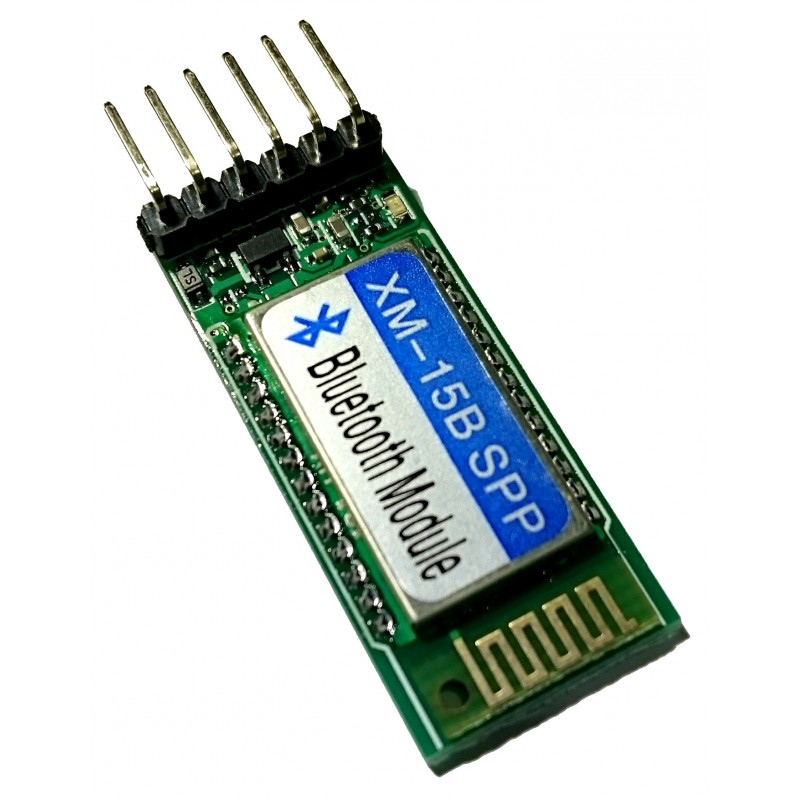 Dlaczego ten? Bo działa w zakresie 3-6V, czyli można go bezpiecznie podłączyć do Arduino. Inne modele – popularne HC-05, HC-06 komunikują się przez 3.3V i wymagają „zbijania” napięcia (np. dzielnikiem napięć). To proste, ale… po co się w to bawić, jak można kupić właśnie moduł pozbawiony tej uciążliwości? Praujemy więc z XM-15B.
Dlaczego ten? Bo działa w zakresie 3-6V, czyli można go bezpiecznie podłączyć do Arduino. Inne modele – popularne HC-05, HC-06 komunikują się przez 3.3V i wymagają „zbijania” napięcia (np. dzielnikiem napięć). To proste, ale… po co się w to bawić, jak można kupić właśnie moduł pozbawiony tej uciążliwości? Praujemy więc z XM-15B.
Pamiętajmy o łączeniu „na krzyż” portów RxD,TxD modułu XM-15B z portami RxD,TxD płytki Arduino (także tymi wirtualnymi).
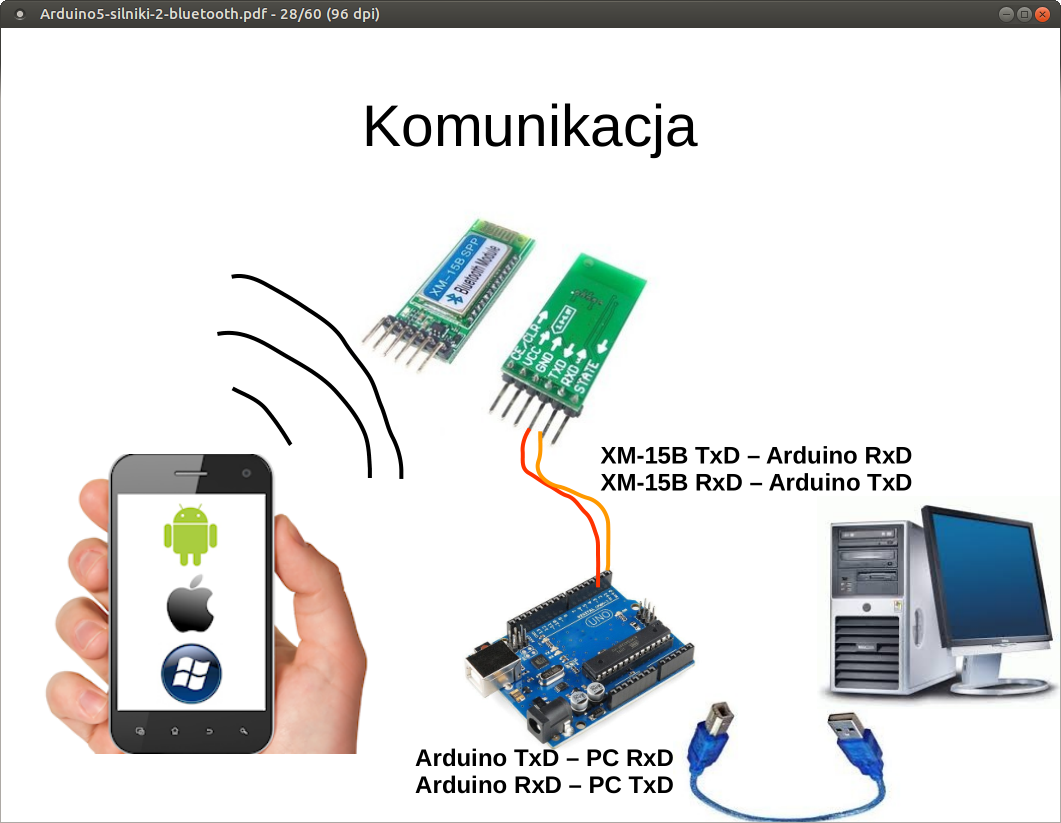
Komunikacja z 8LAMP
Ze sklepu Play bierzemy prostą apkę i sprawdzamy, co ona wysyła do naszego bluetootha. Kod:
#include <SoftwareSerial.h>
#define RxD 8
#define TxD 9
SoftwareSerial btSerial(RxD,TxD);
void setup() {
Serial.begin(9600);
btSerial.begin(9600);
Serial.println("start!");
}
void loop() {
if (btSerial.available()){
Serial.print("Odebrałem znak= ");
Serial.println(btSerial.read());
}
}
Następnie tak modyfikujemy ten program, by wczytany znak sterował naszym serwem – guzik '1′ ustawiał serwo na 90 stopni, guzik '2′ na 10 stopni i guzik '3′ na 170 stopni. Inne modyfikacje mile widziane 😉
Ważne
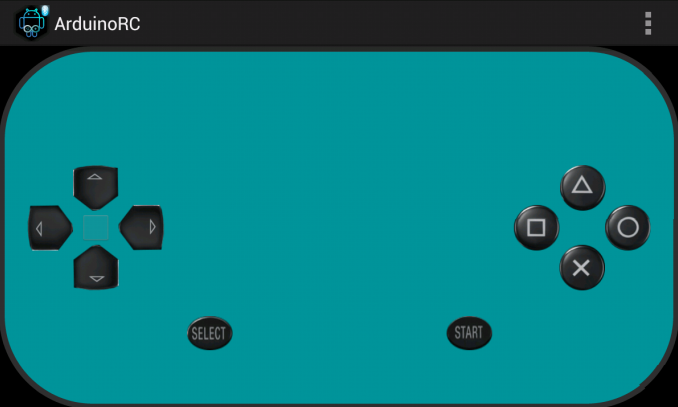
Na następne zajęcia proszę o zainstalowanie ze sklepu Play aplikacji Arduino Bluetooth Controler bo będziemy sterować pojazdem.