Obroty na minutę: RPM (czujka pola magnetycznego SS49E)
Pan Przemek ukończył kod, który zlicza obroty wirującego silniczka – brawo! Należy się pochwała, bo to jego pierwsze zmagania z Arduino.
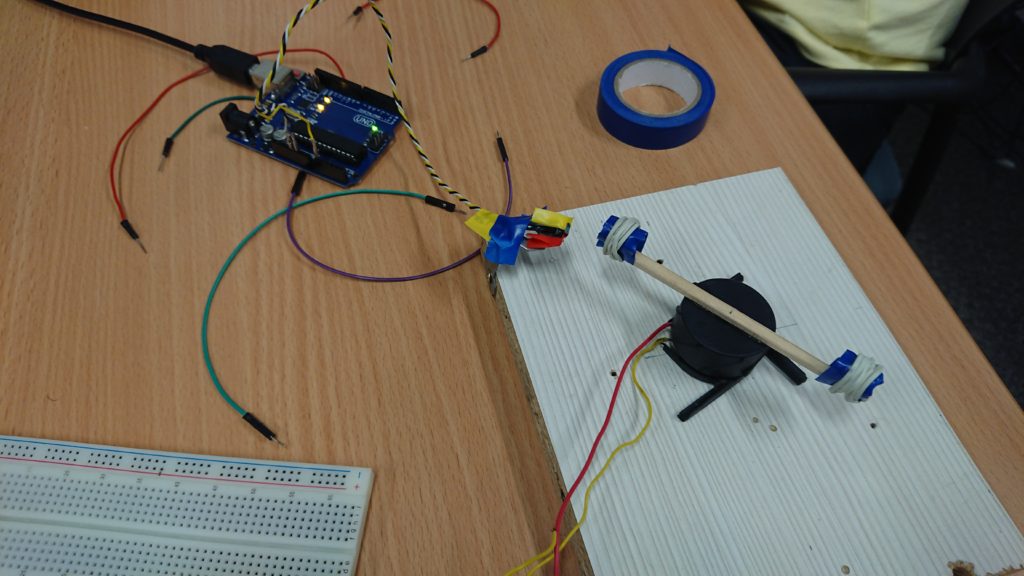
Układ doświadczalny:
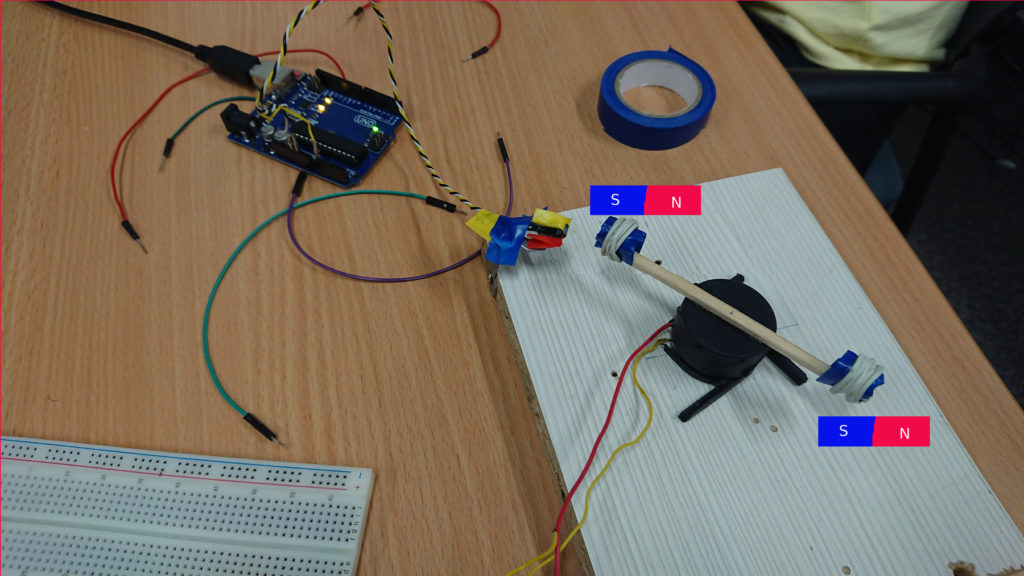
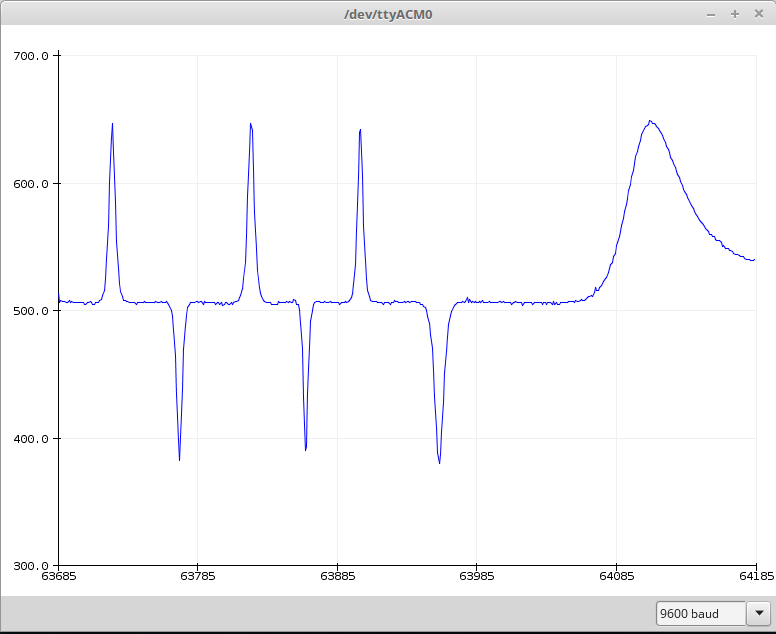
W układzie celowo zamontowano magnesy tak, by czujka SS49E „widziała” raz biegun północny (N) magnesu, a za drugim razem (gdy silniczek obróci sie o 180 stopni) biegun południowy (S). Ustawienie magnesów na końcach patyka nie jest więc przypadkowe 😉 Czujnik SS49E odczytuje zarówno biegun S jak i N (uwaga: nie wszystkie czujki pola magnetycznego, bazującego na efekcie Halla, tak mają – warto to sprawdzić przed zakupejm), dlatego widzimy dwa „piki” podczas obracania silniczka – jeden „do góry” (większe napięcie) oraz „do dołu” (napięcie mniejsze). Z dala od magnesów czujka zwraca napięcie ~2.5V informując, że wartość pola magnetycznego jest (około) zera. Poniżej wykres z
Kreślarki
Program zliczający liczbę obrotów na sekundę (zmienna
czas – aktualnie 1000ms, ale można zmienić, także przez krotność – zmienna
krok). Algorytm polega na znajdowaniu maksimum i minimum napięcia – a zapisywane jest moment ich wystąpienia (do zmiennych
t_1oraz
t_2, odpowiednio). Różnica tych czasów do pół obrotu.
void setup() {
Serial.begin(9600);
}
int i,max_=518,min_=518,a=0,b=0,czas,n=0,krok=1;
float v;
long int t_1=0,t_2=0,t_k=0,t_3=0,t_p;
void loop(){
t_p=millis();
czas=1000;
i=analogRead(A0);
if(i>540){
if(i>max_){
max_=i;
t_1=millis();
}
else if(i<max_){
a=1;
}
}
if(i<490){
if(i<min_){
min_=i;
t_2=millis();
}
else if(i>min_){
b=1;
}
}
if(t_1>t_2){
t_3=t_2;
}
else{
t_3=t_1;
}
if(a==1&&b==1){
t_k=abs(t_2-t_1);
a=0;
b=0;
max_ = 518;
min_ = 518;
if(czas>t_3){
n++;
}
else if(czas<t_3){
Serial.print("Liczba pol-obrotow: ");
Serial.println(n);
n=0;
krok++;
czas=czas*krok;
}
}
}
Zmienna
n (małe n) zlicza wystąpienia „półobrotów”, a co ustalony
czas wypisywany jest komunikat z tą liczbą. W ten sposób mamy właśnie pół-RPS (
revolutions per second), z którego łatwo można już otrzymać RPM (
revolutions per minute).
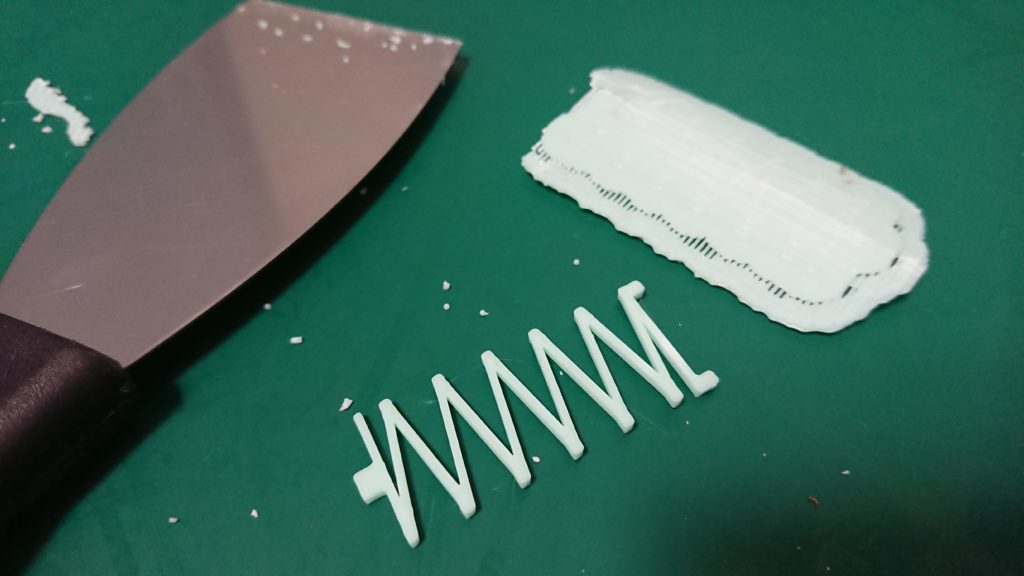
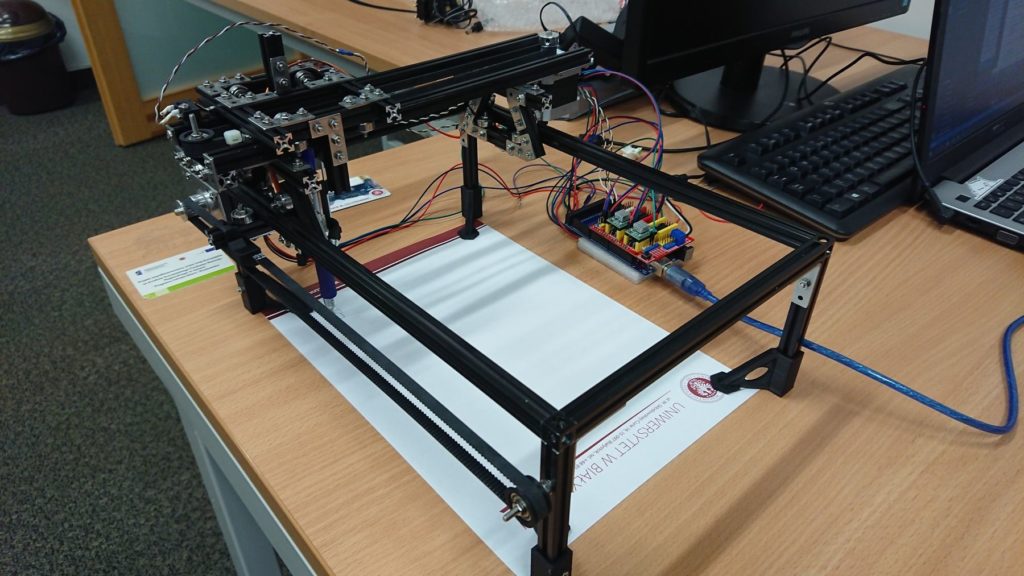
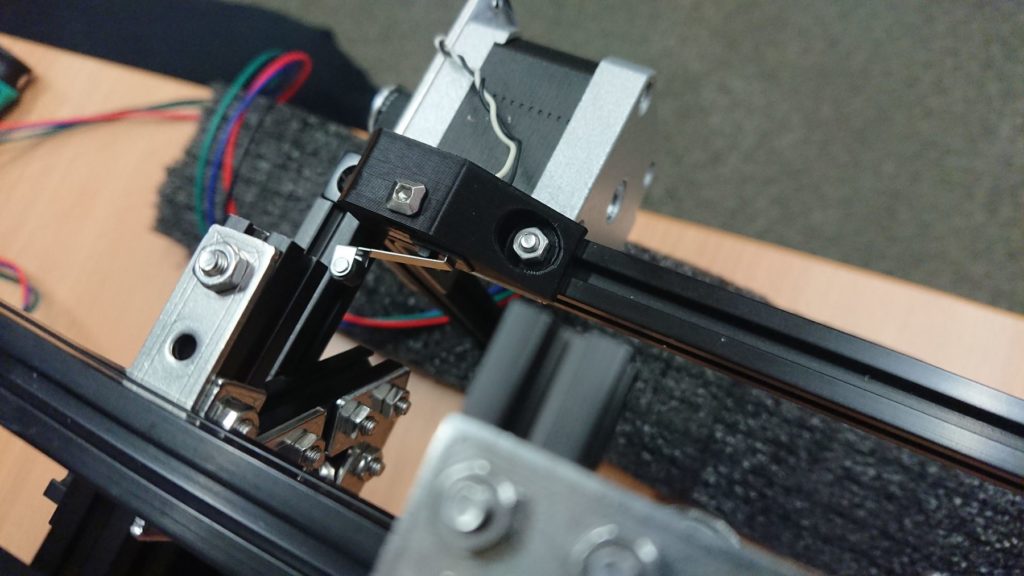
Precyzyjna Maszyna
Sprężynka nie wytrzymała – chyba była zbyt twarda 🙁

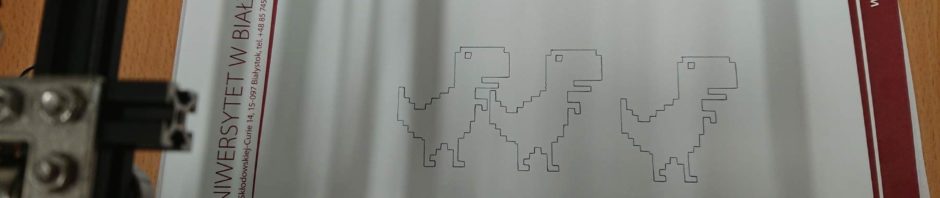
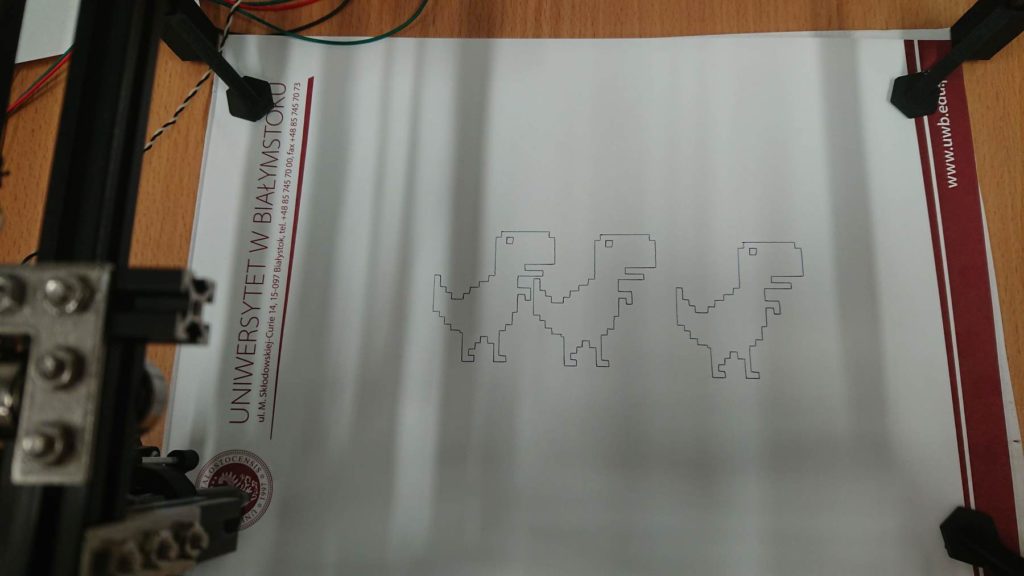
Nowy model powinien być lepszy – bo wydrukowany z Z-Ultratu:
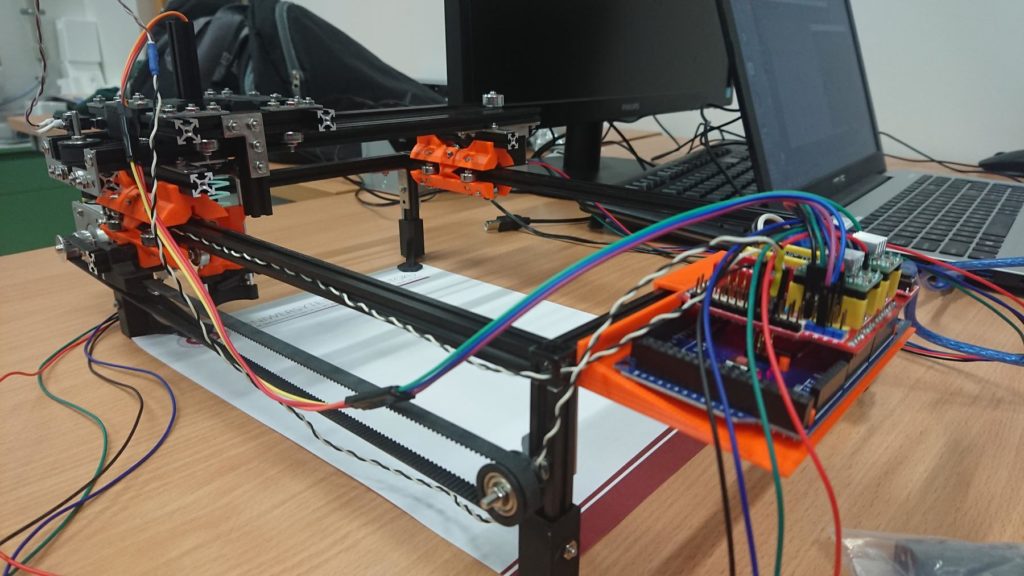
No i mamy coraz lepszą pracę Maszyny:
Więcej o projekcie Maszyny na
stronie projektu.
(c) K.G.

 Jak zawsze coś się musiało rozlutować…
Jak zawsze coś się musiało rozlutować…

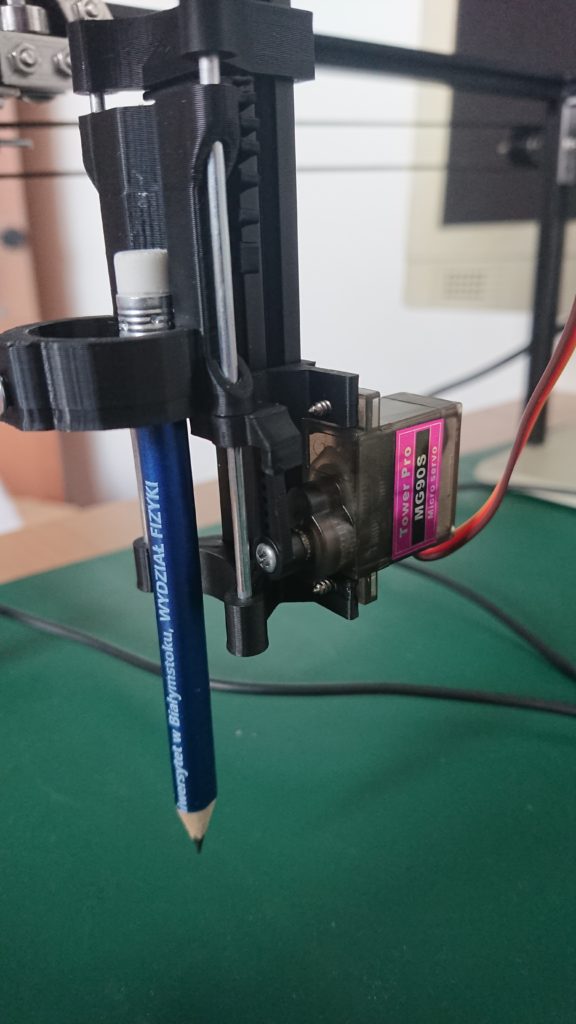
 Uważny obserwator bloga zauważy też, że RAMA ma krótsze nóżki 😉 To też pozytywnie wpływa na wibracje pisaka.
Uważny obserwator bloga zauważy też, że RAMA ma krótsze nóżki 😉 To też pozytywnie wpływa na wibracje pisaka.

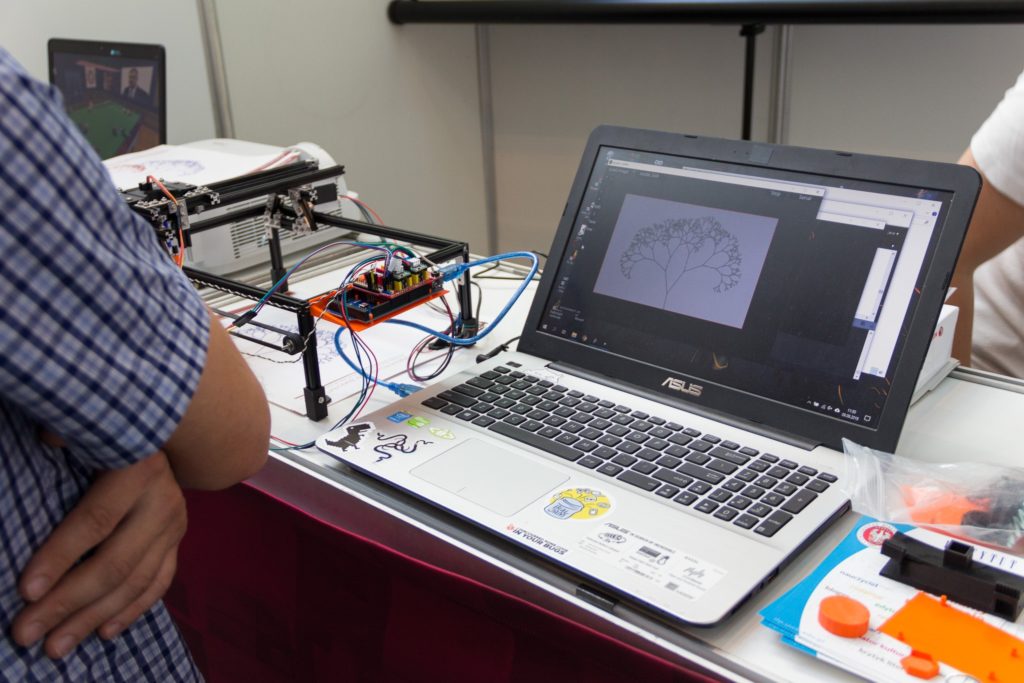
 Znaleźli się też ciekawscy dziennikarze (ESKA, Akadera oraz Radio Białystok) którzy bombardowali pytaniami Pana Bartka (trochę zaskoczonego, mocno speszonego)
Znaleźli się też ciekawscy dziennikarze (ESKA, Akadera oraz Radio Białystok) którzy bombardowali pytaniami Pana Bartka (trochę zaskoczonego, mocno speszonego)
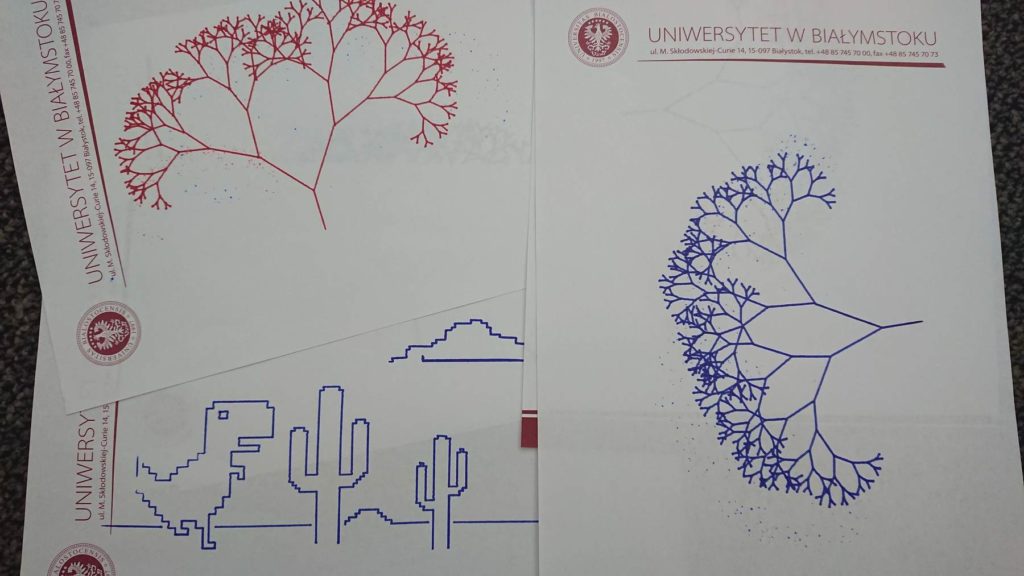
 Prezentacja Maszyny wyszła bardzo dobrze, wydruki (jak widać powyżej) fajne! Warto podkreślić, że nic nie powstało w jeden wieczór – projekt wymagał już wielu godzin pracy (ile? to nawet trudno powiedzieć samemu Autorowi…). Efekty są widoczne – praca popłaca! Szczere brawa dla Pana Bartka!
Więcej o projekcie Maszyny na
Prezentacja Maszyny wyszła bardzo dobrze, wydruki (jak widać powyżej) fajne! Warto podkreślić, że nic nie powstało w jeden wieczór – projekt wymagał już wielu godzin pracy (ile? to nawet trudno powiedzieć samemu Autorowi…). Efekty są widoczne – praca popłaca! Szczere brawa dla Pana Bartka!
Więcej o projekcie Maszyny na 
 Okienka w Processingu oparte są (chyba) na tzw. JFrame’ach. Aby nimi sterować musimy się dostać do obiektu odpowiedzialnego za konkretne okno w aplikacji. Na początku trzeba utworzyć uchwyt do JFrame’a:
Okienka w Processingu oparte są (chyba) na tzw. JFrame’ach. Aby nimi sterować musimy się dostać do obiektu odpowiedzialnego za konkretne okno w aplikacji. Na początku trzeba utworzyć uchwyt do JFrame’a:
 Skoro jest zapis plików, to warto nie stracić swojej pracy przez nieumyślne zamknięcie programu – pojawi się stosowne okienko z potwierdzeniem (było przy
Skoro jest zapis plików, to warto nie stracić swojej pracy przez nieumyślne zamknięcie programu – pojawi się stosowne okienko z potwierdzeniem (było przy 
 Więcej o projekcie Maszyny na
Więcej o projekcie Maszyny na 
 Wspólnie ustaliliśmy, że każdokrotne naciśnięcie przycisku do przodu na pilocie uruchamia silniki na zadany czas (np. 100ms) a następnie je wyłącza. Tak samo z jazdą do tyłu – włączamy odpowiednio silniki (ponownie na 100ms) a potem je wyłączamy (no i ze skrętami tak samo). Wszystko ładnie działało, ale… nie do końca. Silniki są cały czas włączane i wyłączane – a wiadomo, że prąd potrzebny na „rozruch” silnika jest znacznie większy niż podczas jego pracy ze stałą prędkością. Nie ma potrzeby je zatrzymwać, jeśli użytkownik trzyma wciśnięty dany przycisk! Dodatkowo, przy mniejszym czasie pracy silnika (nie 100ms a 50ms czy nawet 20ms) samochód miał „czkawkę” – ciągle uruchamiał i zatrzymywał silniczki. Te dwa powody były wystarczające do zmiany pierwszej wersji kodu – na bardziej zaawansowaną, która nie wyłącza silnika gdy ciągle wciskamy ten sam przycisk. „Czkawka” została (częściowo) opanowana, ale… są błędy w kodzie 🙁 Na dodatek należy obejść (dobrze zaprogramować) błędy w komunikacji pilota na podczerwień z czujką TSOP23xx – przy trzymanym przycisku pojawia się tajemniczy kod ZERO, co przerywa pracę silników. Za tydzień się z tym uporamy!
Wspólnie ustaliliśmy, że każdokrotne naciśnięcie przycisku do przodu na pilocie uruchamia silniki na zadany czas (np. 100ms) a następnie je wyłącza. Tak samo z jazdą do tyłu – włączamy odpowiednio silniki (ponownie na 100ms) a potem je wyłączamy (no i ze skrętami tak samo). Wszystko ładnie działało, ale… nie do końca. Silniki są cały czas włączane i wyłączane – a wiadomo, że prąd potrzebny na „rozruch” silnika jest znacznie większy niż podczas jego pracy ze stałą prędkością. Nie ma potrzeby je zatrzymwać, jeśli użytkownik trzyma wciśnięty dany przycisk! Dodatkowo, przy mniejszym czasie pracy silnika (nie 100ms a 50ms czy nawet 20ms) samochód miał „czkawkę” – ciągle uruchamiał i zatrzymywał silniczki. Te dwa powody były wystarczające do zmiany pierwszej wersji kodu – na bardziej zaawansowaną, która nie wyłącza silnika gdy ciągle wciskamy ten sam przycisk. „Czkawka” została (częściowo) opanowana, ale… są błędy w kodzie 🙁 Na dodatek należy obejść (dobrze zaprogramować) błędy w komunikacji pilota na podczerwień z czujką TSOP23xx – przy trzymanym przycisku pojawia się tajemniczy kod ZERO, co przerywa pracę silników. Za tydzień się z tym uporamy!
 Więcej o projekcie Maszyny na
Więcej o projekcie Maszyny na 
 a następnie konstrukcja uległa modyfikacji (w tym także zasilanie) i powstała taka oto platforma testowa:
a następnie konstrukcja uległa modyfikacji (w tym także zasilanie) i powstała taka oto platforma testowa: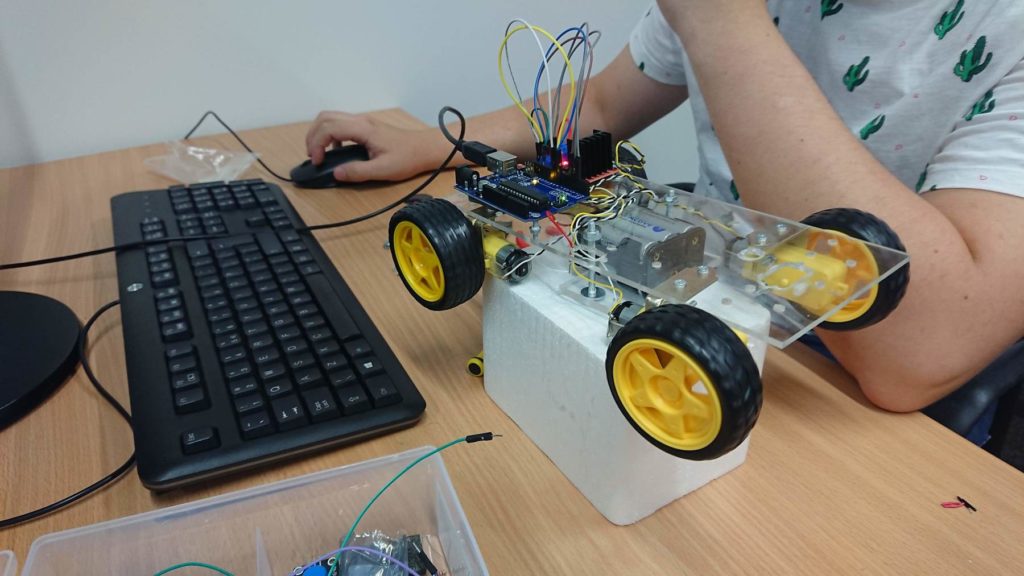 Udało się „nauczyć” jeździć ten pojazd do przodu, tyłu i skręcać. Na razie wykonuje on wszystkie te czynności w kółko – więc jest to mało sensowne. Ale kolejny krok to zdalne sterowanie i ten krok to już duży krok w kierunku
Udało się „nauczyć” jeździć ten pojazd do przodu, tyłu i skręcać. Na razie wykonuje on wszystkie te czynności w kółko – więc jest to mało sensowne. Ale kolejny krok to zdalne sterowanie i ten krok to już duży krok w kierunku 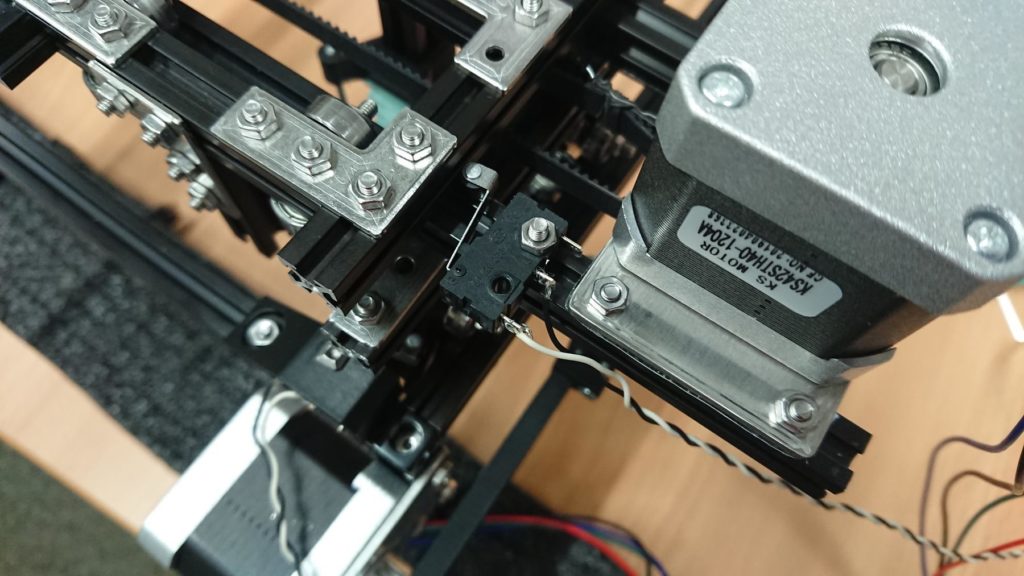
 Skoro są już krańcówki, to należy je oprogramować. Drogi są (co najmniej) dwie: 1) w programie realizującym poruszanie silnikami sprawdzamy, co się dzieje z krańcówkami – i w razie czego zatrzymujemy konkretny silnik, lub 2) inicjalizujemy przerwania, które robią to automatycznie. Jednak zanim doszło do tego to… pojawiły się problemy z rysowaniem linii po skosie. Przygotowany przez Pana Bartka kod miał działać – jednak okazało się, że ma wady. Wiadomo – ten się nie myli, kto nic nie robi 😉 Dlatego dzisiejsze zajęcia poszły w kierunku naprawy softwaru… Jeszcze jest trochę roboty 😉
Więcej o projekcie Maszyny na
Skoro są już krańcówki, to należy je oprogramować. Drogi są (co najmniej) dwie: 1) w programie realizującym poruszanie silnikami sprawdzamy, co się dzieje z krańcówkami – i w razie czego zatrzymujemy konkretny silnik, lub 2) inicjalizujemy przerwania, które robią to automatycznie. Jednak zanim doszło do tego to… pojawiły się problemy z rysowaniem linii po skosie. Przygotowany przez Pana Bartka kod miał działać – jednak okazało się, że ma wady. Wiadomo – ten się nie myli, kto nic nie robi 😉 Dlatego dzisiejsze zajęcia poszły w kierunku naprawy softwaru… Jeszcze jest trochę roboty 😉
Więcej o projekcie Maszyny na 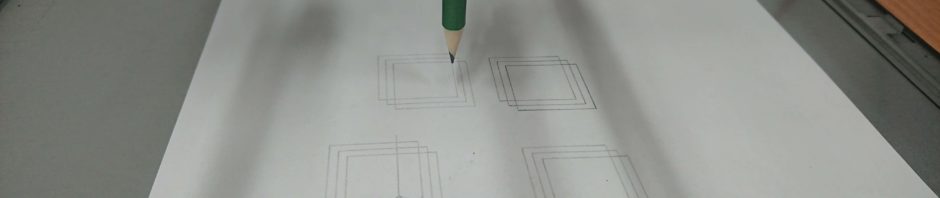

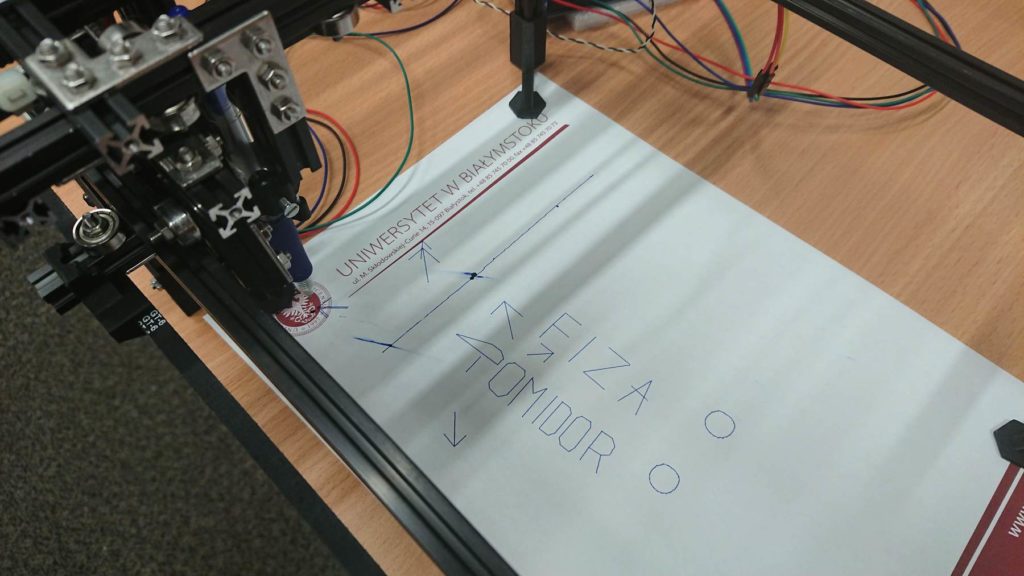
 No i kolejny (próbny) precyzyjny rysunek:
Opis całego proejktu Maszyny pod
No i kolejny (próbny) precyzyjny rysunek:
Opis całego proejktu Maszyny pod 
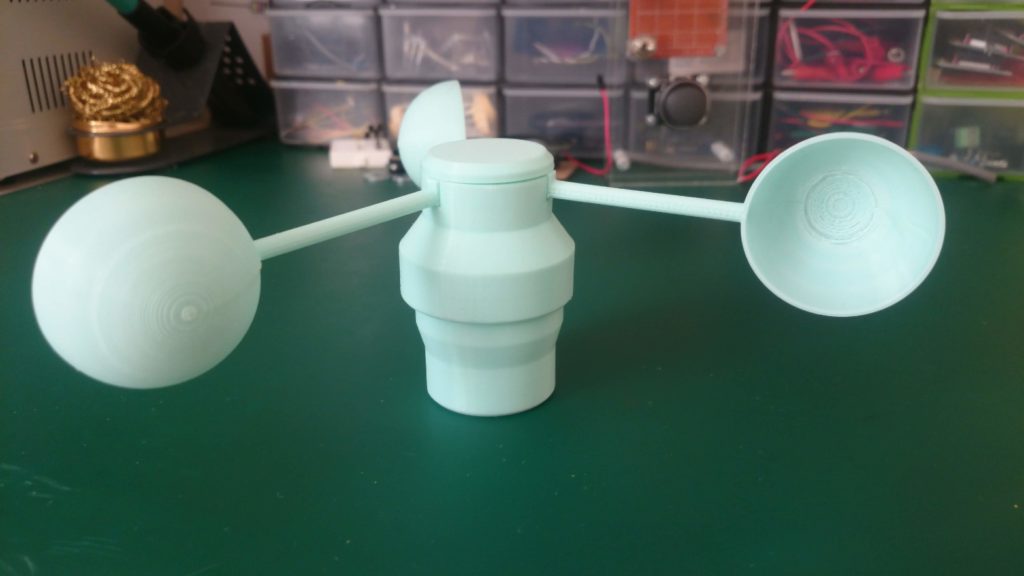
 A po co nam zliczanie tych obrotów? Zastosowań jest wiele, jednym z nich jest mierzenie prędkości wiatru takim prostym urządzeniem:
A po co nam zliczanie tych obrotów? Zastosowań jest wiele, jednym z nich jest mierzenie prędkości wiatru takim prostym urządzeniem:
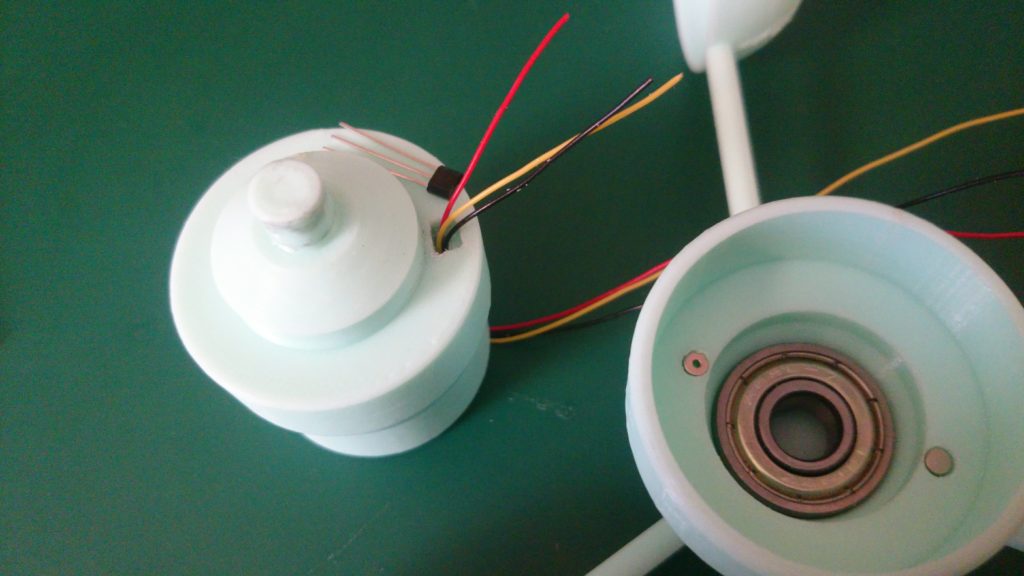
 w środku którego znajdują się: czujka SS49E, dwa magnesy oraz łożysko kulkowe (typ 682ZZ).
w środku którego znajdują się: czujka SS49E, dwa magnesy oraz łożysko kulkowe (typ 682ZZ).
 O dalszych losach tego projektu niebawem…
O dalszych losach tego projektu niebawem…