Podstawy Arduino
LED-y podłączone do Arduino: pinMode(), digitalWrite(), delay() – trzy funkcje, a ile radochy!
Maskotka
Sterowanie bezprzewodowe (PP) – działa! Mimo to pojazd jeździ bokiem, bo silniki pracują nierówno oraz mechanika kuleje…

LED-y podłączone do Arduino: pinMode(), digitalWrite(), delay() – trzy funkcje, a ile radochy!
Sterowanie bezprzewodowe (PP) – działa! Mimo to pojazd jeździ bokiem, bo silniki pracują nierówno oraz mechanika kuleje…
1x LED + Arduino: setup(), loop(), pinMode(), digitalWrite(), delay() – zaczyna się zabawa…
Projekt wraca na trapetę – ale najpierw trzeba to spowrotem uruchomić, a tu przewody się rozłączyły, radiówka nie działa…. Brawo dla PP + BB za reaktywację Maskotki!

PP programował serwa: klasyczne (obrót 0..180 stopni) oraz pracy ciągłej… a tymczasem BB naprawiał popsute egzemplarze:

BB udoskonalił swój pojekt heXapod – robot zyskuje nowe, lepsze nogi!

Więcej o tym na stronie pojektu heXapod .
KG (c) 2020

PP zapoznaje się z czujką TCRT5000 do swojego projektu…
 a BB udoskonalił swój pojekt heXapod. Tyle i aż tyle 😉
a BB udoskonalił swój pojekt heXapod. Tyle i aż tyle 😉
KG (c) 2020

Dziś zadziałało chodzenie/bieganie
Więcej szczegółów w stronie projektu heXapod.
KG (c) 2020

Pan Bartek zademonstrował poruszanie. Na dodatek heXapod został zerwany ze smyczy – sterowany jest bezprzewodowo (nRF24). Jak na pierwsze próby to wynik jest bardzo obiecujący!
KG (c) 2020
(Wpis ten jest reaktywacją wpisu z 2017 r. Okazało się, że warto podzielić oryginalny wpis na dwie mniejsze części – jedna dotycząca komunikacji I2C, druga SPI właśnie).
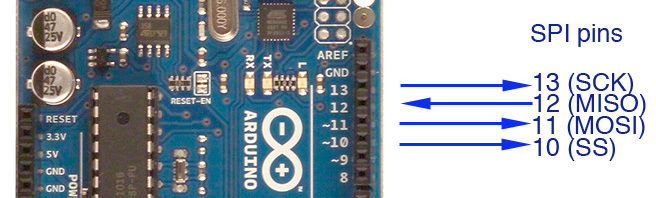
Tutaj https://www.arduino.cc/en/reference/SPI można poczytać czym jest protokół SPI. Nam wystarczy, że jest to szybka komunikacja synchroniczna na krótki dystans, wykorzystująca przynajmniej 3 linie nazwane MISO, MOSI i SCK. Dodatkowo są jeszcze linie CE i SCN. Jeśli więc w jakimś module zobaczymy tak nazwane piny – to znak, że działa w standardzie SPI właśnie.
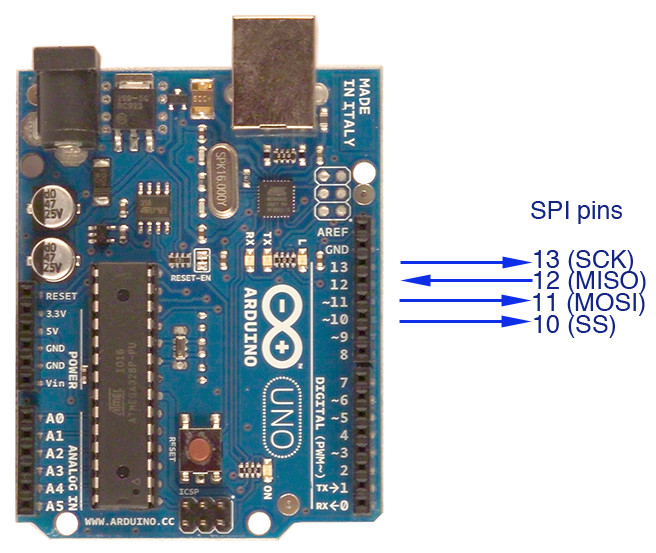
Specjalne piny SPI w Arduino to MISO (12 w Arduino), MOSI (11 w Arduino) oraz SCK (13 w Arduin0). Inne piny – CE i CSN są dowolne cyfrowe (występuje różne nazewnictwo – SS to Slave Select i odpowiada CE, który musi działać jako OUTPUT, w odróżnieniu od CSN). W poniższym przykładzie wybrałem 9 i 10 – a dlaczego? okaże się to później (na kolejnych spotkaniach naszego koła).
Bardzo fajny moduł (no i bardzo tani – około 5 zł, co w porównaniu do modułów Bluetooth jest 1/5 ceny) – ale najpierw trzeba wiedzieć, jak podłączać go do Arduino:

UWAGA: zasilanie VCC jest z przedziału 3.3V-3.6V – podłączając do Arduino 5V USZKODZISZ moduł.
Oprogramowanie? Ponownie jest kilka bibliotek, ja użyłem nRF24L01.h by TMRh20. Jak poprzednio – doinstalowujemy do naszego Arduino IDE i tworzymy program odbierający dane:
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(9, 10);//CE, CS
const byte rxAddr[6] = "grzyb";
void setup()
{
Serial.begin(9600);
Serial.print("nRF24 INIT=");
bool ok=radio.begin();
Serial.println(ok);
radio.openReadingPipe(0, rxAddr);
radio.startListening();
}
char text[32];
void loop()
{
if (radio.available())
{
radio.read(&text, sizeof(text));
Serial.print("t=");
Serial.print(millis()/1000);
Serial.print("s, text=");
Serial.println(text);
}
}
W linii 6 nadalismy nazwę naszemu strumieniowi – dowolne 5 znaków, niekoniecznie musi być tak jak u mnie… Ale nadajnik też musi nadawać na tym samym „paśmie”:
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <printf.h>
RF24 radio(9, 10);//CE, CS
uint8_t rxAddr[6] = "grzyb";
void setup()
{
Serial.begin(9600);
Serial.print("nRF24 INIT=");
bool ok=radio.begin();
Serial.println(ok);
printf_begin;
radio.printDetails();
radio.setRetries(15, 15);
radio.openWritingPipe(rxAddr);
radio.stopListening();
}
char text[] = "Fiza: OK!";
void loop()
{
radio.write(&text, sizeof(text));
text[7]=48+rand()%10;
text[8]=48+rand()%10;
text[9]=48+rand()%10;
text[10]=48+rand()%10;
text[11]=48+rand()%10;
Serial.println(text);
delay(3000);
}
Maksymalna długość jednorazowo przesłanego napisu wynosi 32 bajty, a inne ważne rzeczy – w dokumentacji (zachęcam do czytania).
Np. problem ze zrywaniem połączenia – ludzie piszą o niestabilnym napięciu z pinu 3.3V Arduino oraz o problemie z prądem (pin 3.3V może maksymalnie dać tylko 50mA), dlatego dodają dodatkowy kondensator (mały, np 4.7 μF, 10 μF) do zasilania modułu:

Mogą pojawić się też problemy z anteną, więc albo kupujemy moduł z „wypasioną antenką”:

albo samodzielnie robimy sobie antenkę:

Polecam zajrzeć tutaj aby poczytać o problemach i różnych sposobach ich rozwiązywania, a także o oprogramowywaniu tego moduły.
(c) K.G. 2017, 2019
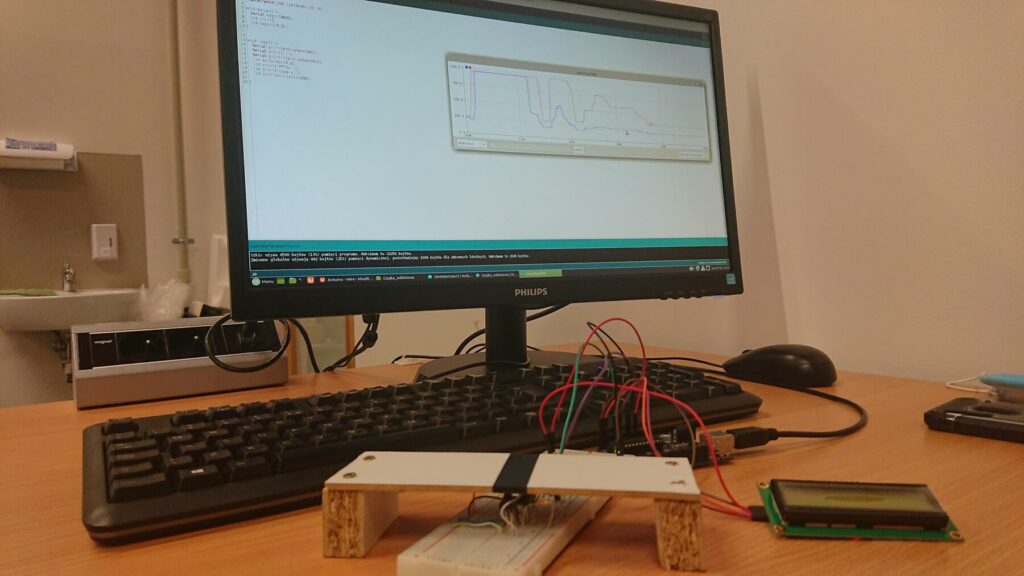
 Chwilowo nie zgłaszamy problemów z opóźnieniami spowodowanymi tekstowym protokołem – zobaczymy, co będzie dalej. Powyżej warsztat pracy Pana Przemka – jak widać kontroler jest minimalistyczny, a temat stworzenia fajniejszego pozostawiamy na później. Prace nad pojazdem sterowanym przez radio idą w bardzo dobrym kierunku. Za tydzień upgrade Maskotki, a potem nowe podwozie (+ modyfikacje serwomechanizmów do pracy ciągłej).
Chwilowo nie zgłaszamy problemów z opóźnieniami spowodowanymi tekstowym protokołem – zobaczymy, co będzie dalej. Powyżej warsztat pracy Pana Przemka – jak widać kontroler jest minimalistyczny, a temat stworzenia fajniejszego pozostawiamy na później. Prace nad pojazdem sterowanym przez radio idą w bardzo dobrym kierunku. Za tydzień upgrade Maskotki, a potem nowe podwozie (+ modyfikacje serwomechanizmów do pracy ciągłej).
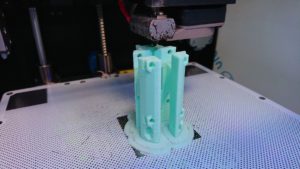
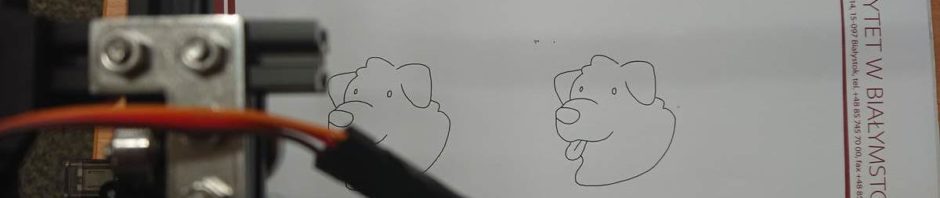
 Więcej o projekcie PM2D3D na dedykowanej stronie.
Więcej o projekcie PM2D3D na dedykowanej stronie.
(c) K.G.
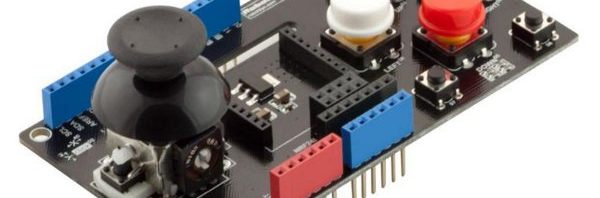
 Jest to bardzo ciekawy układ, bo nie dość, że ma joystick oraz 7 przycisków (4 duże, kolorowe, jeden w joysticku, oraz 2 małe – mikrostyki), to ma jeszcze adaptery na radiówkę nRF24 (i inne też, ale tego nie tykamy). Wszystko złożone w „kanapkę” może pełnić funkcję kontrolera – po przyczepieniu bateryjki 9V (np. gumką recepturką).
Jest to bardzo ciekawy układ, bo nie dość, że ma joystick oraz 7 przycisków (4 duże, kolorowe, jeden w joysticku, oraz 2 małe – mikrostyki), to ma jeszcze adaptery na radiówkę nRF24 (i inne też, ale tego nie tykamy). Wszystko złożone w „kanapkę” może pełnić funkcję kontrolera – po przyczepieniu bateryjki 9V (np. gumką recepturką).


#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(9, 10);//CE, CS
uint8_t rxAddr[6] = "grzyb";
void setup(){
Serial.begin(9600);
Serial.print("nRF24 INIT=");
bool ok=radio.begin();
Serial.println(ok);
radio.setRetries(15, 15);
radio.openWritingPipe(rxAddr);
radio.stopListening();
//dla modulu JoyShield
pinMode(2, INPUT);
pinMode(3, INPUT);
pinMode(4, INPUT);
pinMode(5, INPUT);
pinMode(6, INPUT);
}
char bufor[32];
String napis;
void loop(){
//tworzymy napis wedlug naszego protokolu
napis = String(analogRead(A0)) + ";" + String(analogRead(A1)) + ";" + String(digitalRead(2)) + ";" + String(digitalRead(3)) + ";" + String(digitalRead(4)) + ";" + String(digitalRead(5)) + ";" + String(digitalRead(6)) + ";";
//przygotowujemy bufor -- tablice z napisem...
napis.toCharArray(bufor, 32);
//wazne! wysylamy bufor a nie napis!
radio.write(&bufor, sizeof(bufor));
}
Ponieważ radio wysyła dane w postaci tablicy, nie możemy wysyłać obiektu napis. Dlatego korzystamy z metody toCharArray() klasy String i przekopiowujemy zawartość napisu do bufora – tablicy. W „eter” wysyłamy tablicę bufor.
void setup() {
//dane wprowadzamy z klawiatury przez Serial
Serial.begin(9600);
}
String tekst;
String ciag;
char znak = ';';//separator pola
int x,y; //wspolrzedne x,y
byte b1,b2,b3,b4,b5;//stan 5 przyciskow
int k,l;//pomocnicze
unsigned long int t1,t2;
void loop() {
if(Serial.available()>0){
tekst=Serial.readString();
Serial.println(tekst);
t1=micros();
k=tekst.indexOf(znak);
ciag=tekst.substring(0,k);
x=ciag.toInt();
l=k+1;
k=tekst.indexOf(znak,l);
ciag=tekst.substring(l,k);
y=ciag.toInt();
l=k+1;
k=tekst.indexOf(znak,l);
ciag=tekst.substring(l,k);
b1=ciag.toInt();
l=k+1;
k=tekst.indexOf(znak,l);
ciag=tekst.substring(l,k);
b2=ciag.toInt();
l=k+1;
k=tekst.indexOf(znak,l);
ciag=tekst.substring(l,k);
b3=ciag.toInt();
l=k+1;
k=tekst.indexOf(znak,l);
ciag=tekst.substring(l,k);
b4=ciag.toInt();
l=k+1;
k=tekst.indexOf(znak,l);
ciag=tekst.substring(l,k);
b5=ciag.toInt();
l=k+1;
t2=micros();
Serial.print("Pozycja X: ");
Serial.println(x);
Serial.print("Pozycja Y: ");
Serial.println(y);
Serial.print("PRZYCISK 1: ");
Serial.println(b1);
Serial.print("PRZYCISK 2: ");
Serial.println(b2);
Serial.print("PRZYCISK 3: ");
Serial.println(b3);
Serial.print("PRZYCISK 4: ");
Serial.println(b4);
Serial.print("PRZYCISK 5: ");
Serial.println(b5);
Serial.print("czas dekodowaia [mikrosekundy]= ");
Serial.println(t2-t1);
}//if
}//loop
(c) K.G.