Pojazd sterowany – nRF24L01
Pan Przemek dalej kombinuje z komunikacją radiową na bazie układu nRF24. Jako nową zabawkę dostał
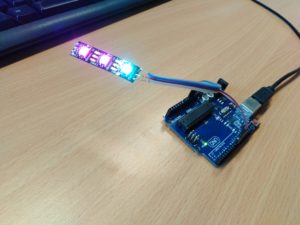
JoyShield-a do Arduino, o takiego:

Jest to bardzo ciekawy układ, bo nie dość, że ma joystick oraz 7 przycisków (4 duże, kolorowe, jeden w joysticku, oraz 2 małe – mikrostyki), to ma jeszcze adaptery na radiówkę nRF24 (i inne też, ale tego nie tykamy). Wszystko złożone w „kanapkę”
może pełnić funkcję kontrolera – po przyczepieniu bateryjki 9V (np. gumką recepturką).


Tekstowy protokół — kodowanie
Bazujemy na
protokole tekstowym – shield odczytuje położenie joysticka, oraz 5 przycisków (chwilowo nie obsługujemy wszystkich). Dane wysyłane są przez nRF24 jako
tekst, a poszczególne pola oddzielone są
średnikiem. Jedna paczka danych wygląda więc tak:
507;512;0;1;1;0;0;
gdzie pierwsza liczba określa położenie joy-a na osi X, druga na osi Y, a kolejne zera i jedynki to stan logiczny 5-ciu przycisków. Bardzo proste w utworzeniu tego napisu — dzięki klasie String i jego licznie przeciążonych konstruktorach, oraz operatorowi „dodawania”.
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
RF24 radio(9, 10);//CE, CS
uint8_t rxAddr[6] = "grzyb";
void setup(){
Serial.begin(9600);
Serial.print("nRF24 INIT=");
bool ok=radio.begin();
Serial.println(ok);
radio.setRetries(15, 15);
radio.openWritingPipe(rxAddr);
radio.stopListening();
//dla modulu JoyShield
pinMode(2, INPUT);
pinMode(3, INPUT);
pinMode(4, INPUT);
pinMode(5, INPUT);
pinMode(6, INPUT);
}
char bufor[32];
String napis;
void loop(){
//tworzymy napis wedlug naszego protokolu
napis = String(analogRead(A0)) + ";" + String(analogRead(A1)) + ";" + String(digitalRead(2)) + ";" + String(digitalRead(3)) + ";" + String(digitalRead(4)) + ";" + String(digitalRead(5)) + ";" + String(digitalRead(6)) + ";";
//przygotowujemy bufor -- tablice z napisem...
napis.toCharArray(bufor, 32);
//wazne! wysylamy bufor a nie napis!
radio.write(&bufor, sizeof(bufor));
}
Ponieważ
radio wysyła dane w postaci tablicy, nie możemy wysyłać obiektu
napis. Dlatego korzystamy z metody
toCharArray() klasy String i przekopiowujemy zawartość napisu do bufora – tablicy. W „
eter” wysyłamy tablicę
bufor.
Tekstowy protokół — odczyt
No właśnie, prostota użycia napisów pociąga za sobą „problem” odczytywania takich danych. W grę wchodzą bardzo przydatne metody klasy
String:
- indexOf(napis) — zwracająca pozycję napisu w danym stringu (u nas napis to średnik, którym oddzielaliśmy liczby)
- length() — zwracająca długość stringu
- remove(od, do) — ucinająca napis od pozycji od do pozycji do
- substring(od, do) — zwracająca podciąg w danym napisie, od pozycji od do pozycji do
- toInt(napis) — zamienia napis na liczbę całkowitą (int)
Poniżej program dekodujący nasz protokół – czyli zamieniający
napis na
int x,y;
byte b1,b2,b3,b4,b5;
Napis wczytany z klawiatury, przez komunikację szeregową – dzięki temu możemy testować nasz program na różne sposoby (o przeniesieniu tego kodu na radio — będzie za tydzień).
void setup() {
//dane wprowadzamy z klawiatury przez Serial
Serial.begin(9600);
}
String tekst;
String ciag;
char znak = ';';//separator pola
int x,y; //wspolrzedne x,y
byte b1,b2,b3,b4,b5;//stan 5 przyciskow
int k,l;//pomocnicze
unsigned long int t1,t2;
void loop() {
if(Serial.available()>0){
tekst=Serial.readString();
Serial.println(tekst);
t1=micros();
k=tekst.indexOf(znak);
ciag=tekst.substring(0,k);
x=ciag.toInt();
l=k+1;
k=tekst.indexOf(znak,l);
ciag=tekst.substring(l,k);
y=ciag.toInt();
l=k+1;
k=tekst.indexOf(znak,l);
ciag=tekst.substring(l,k);
b1=ciag.toInt();
l=k+1;
k=tekst.indexOf(znak,l);
ciag=tekst.substring(l,k);
b2=ciag.toInt();
l=k+1;
k=tekst.indexOf(znak,l);
ciag=tekst.substring(l,k);
b3=ciag.toInt();
l=k+1;
k=tekst.indexOf(znak,l);
ciag=tekst.substring(l,k);
b4=ciag.toInt();
l=k+1;
k=tekst.indexOf(znak,l);
ciag=tekst.substring(l,k);
b5=ciag.toInt();
l=k+1;
t2=micros();
Serial.print("Pozycja X: ");
Serial.println(x);
Serial.print("Pozycja Y: ");
Serial.println(y);
Serial.print("PRZYCISK 1: ");
Serial.println(b1);
Serial.print("PRZYCISK 2: ");
Serial.println(b2);
Serial.print("PRZYCISK 3: ");
Serial.println(b3);
Serial.print("PRZYCISK 4: ");
Serial.println(b4);
Serial.print("PRZYCISK 5: ");
Serial.println(b5);
Serial.print("czas dekodowaia [mikrosekundy]= ");
Serial.println(t2-t1);
}//if
}//loop
Tekstowy protokół — szybkość dekodowania
Wielokrotne użycie powyższych funkcji powoduje, że odkodowanie napisu
507;512;0;1;1;0;0; i zamiana go na
int x, y;
byte b1,b2,b3,b4,b5;
zajmuje dla Arduino UNO
od 260 do 550 mikrosekund (czyli ~0.5ms). A dlaczego nie jeden, równy czas? Bo w zależności od postaci dekodowanego
napisu mikrokotrolerek musi więcej lub mniej pracować. Mniej „męczy” się w przypadku ciągu
1;1;1;0;0;0;0; a więcej w przypadku
1012;1017;0;0;0;1;1; Dobra, zrozumiałe. A czy to duży czas? Dla człowieka to nic, dla elektroniki sporo… Czy to nam wystarczy – czy nie spowoduje opóźnień (tzw „lagów”) w sterowaniu pojazdem? O tym przekonamy się po zastosowaniu tego protokołu do pojazdu (za tydzień).
Tekstowy protokół: modyfikacje — suma kontrolna
Można pomyśleć o rozbudowie naszego protokołu na dodatkowe „pole”, będące sumą kontrolą. Jeden z pomysłów to wysumowanie wszystkich danych (w końcu to liczby całkowite) i zapisanie tej sumy jako ostatni, dodatkowy element. Dla naszego przypadku wyglądałoby to tak: 507;512;0;1;1;0;0;
1021; Po stronie odbiornika dekodujemy napis, liczymy sumę x+y+b1+b2+b3+b4+b5 i porównujemy z ostatnią wartością – nazwijmy ją
sumak. A Jeśli nie ma równości… odrzucamy (ignorujemy) paczkę danych i czekamy na kolejną.
Tekstowy protokół: modyfikacje — protokół binarny
Lepiej by było stworzyć podobny protokół ale
binarny, czyli nie bawić się w zapis liczb w postaci
stringów, dodatkowo oddzielać je przecinkami tylko wysyłać x,y jako integer, a przyciski b1,b2,b3,b4 i b5 jako
byte (nie 5 bajtów, a jeden – wszak 1 bajt = 8 bitów, mamy więc nadam zapas). Zyskujemy na tym mniejsze porcje danych – wszystkie informacje z JoyShielda to tylko 5 bajtów, a nie 14 (najlepszy przypadek) czy nawet 20 bajtów (najgorszy przypadek). No i nie ma zabawy w dekodowanie danych z wykorzystaniem metod klasy String… Ale to może przy innej okazji 😉
(c) K.G.



 Jak zawsze coś się musiało rozlutować…
Jak zawsze coś się musiało rozlutować…

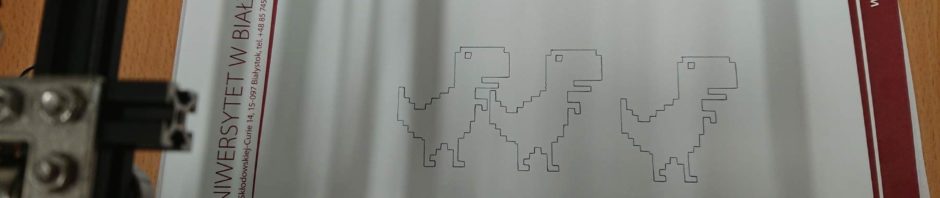
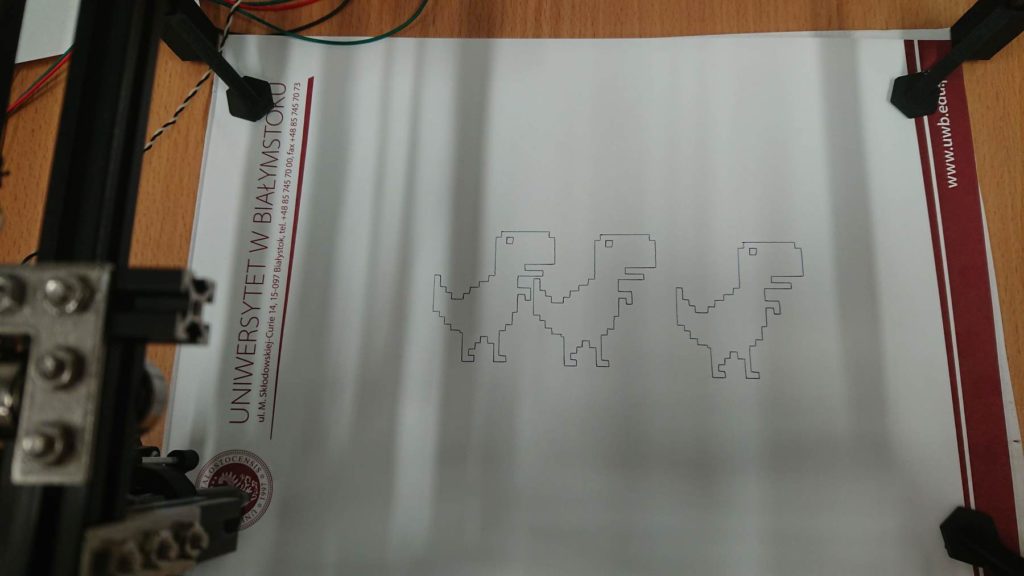
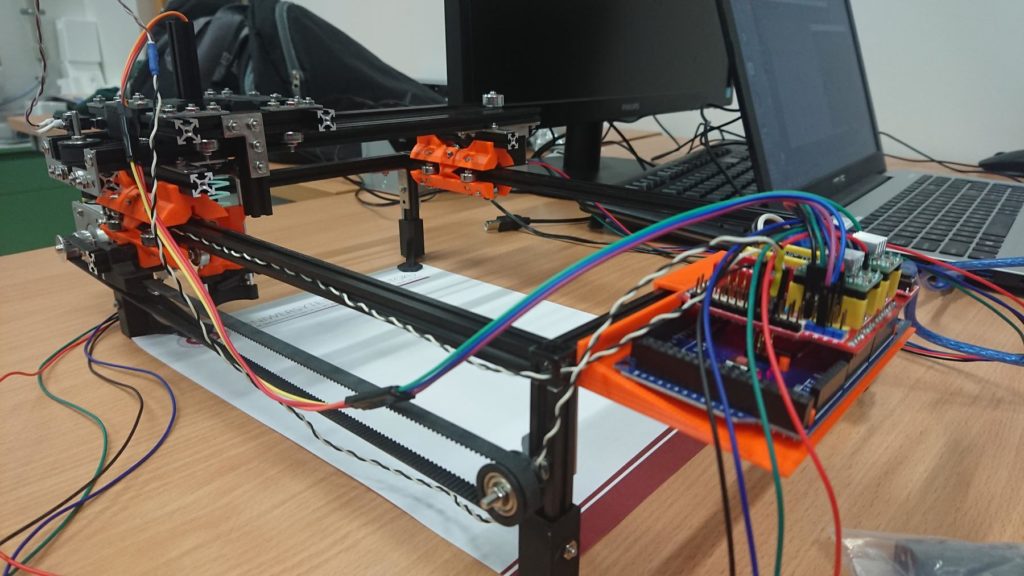 Uważny obserwator bloga zauważy też, że RAMA ma krótsze nóżki 😉 To też pozytywnie wpływa na wibracje pisaka.
Uważny obserwator bloga zauważy też, że RAMA ma krótsze nóżki 😉 To też pozytywnie wpływa na wibracje pisaka.
 Chwilowo nie zgłaszamy problemów z opóźnieniami spowodowanymi t
Chwilowo nie zgłaszamy problemów z opóźnieniami spowodowanymi t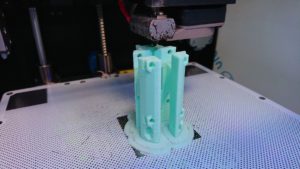
 Więcej o projekcie PM2D3D na
Więcej o projekcie PM2D3D na 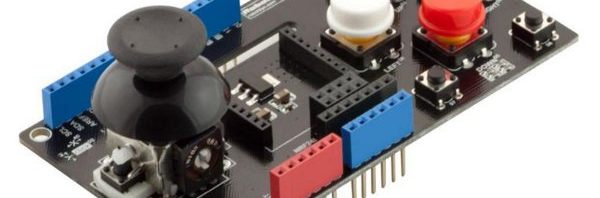

 Znaleźli się też ciekawscy dziennikarze (ESKA, Akadera oraz Radio Białystok) którzy bombardowali pytaniami Pana Bartka (trochę zaskoczonego, mocno speszonego)
Znaleźli się też ciekawscy dziennikarze (ESKA, Akadera oraz Radio Białystok) którzy bombardowali pytaniami Pana Bartka (trochę zaskoczonego, mocno speszonego)
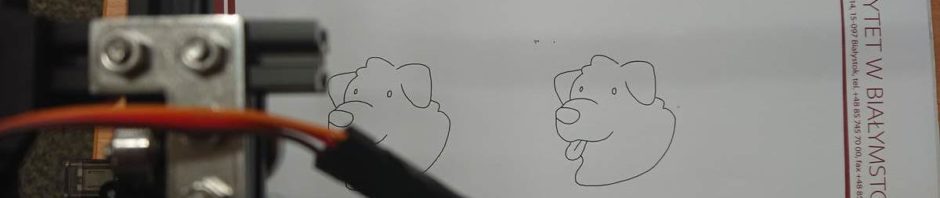
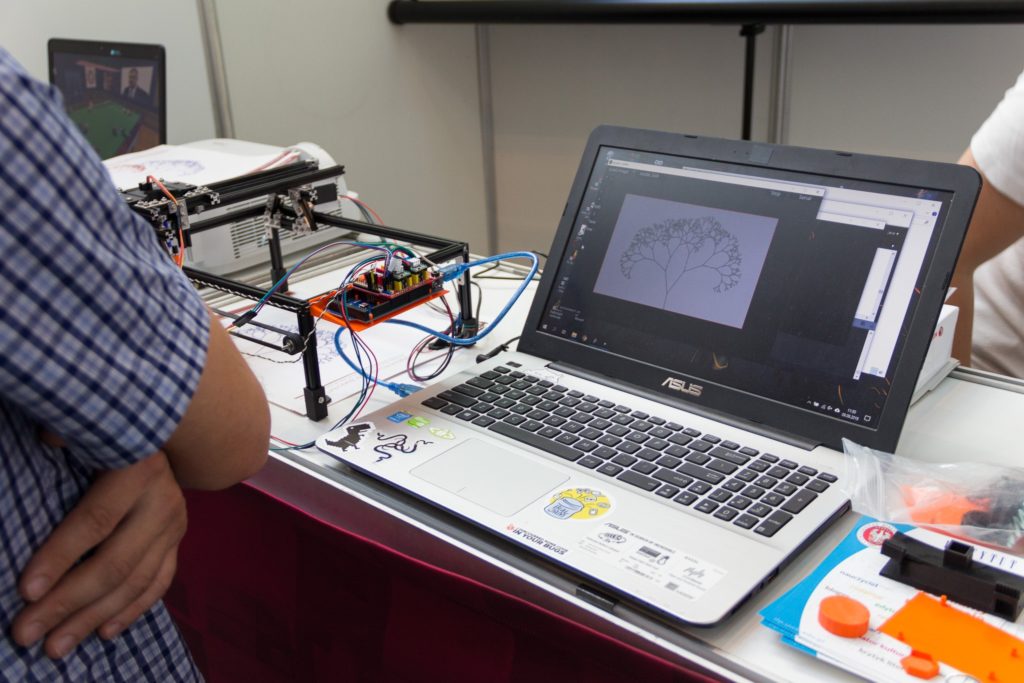
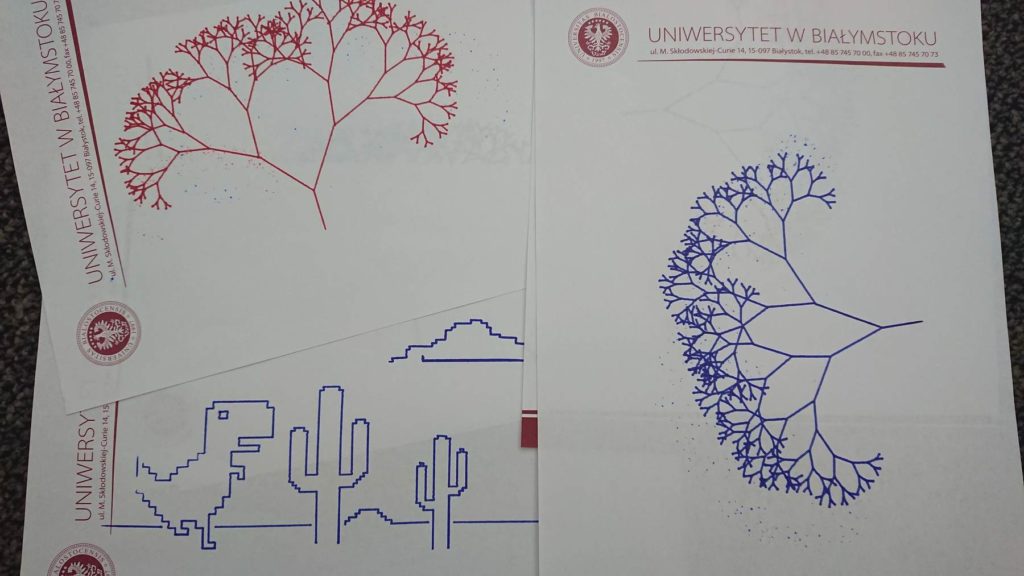
 Prezentacja Maszyny wyszła bardzo dobrze, wydruki (jak widać powyżej) fajne! Warto podkreślić, że nic nie powstało w jeden wieczór – projekt wymagał już wielu godzin pracy (ile? to nawet trudno powiedzieć samemu Autorowi…). Efekty są widoczne – praca popłaca! Szczere brawa dla Pana Bartka!
Więcej o projekcie Maszyny na
Prezentacja Maszyny wyszła bardzo dobrze, wydruki (jak widać powyżej) fajne! Warto podkreślić, że nic nie powstało w jeden wieczór – projekt wymagał już wielu godzin pracy (ile? to nawet trudno powiedzieć samemu Autorowi…). Efekty są widoczne – praca popłaca! Szczere brawa dla Pana Bartka!
Więcej o projekcie Maszyny na 
 Okienka w Processingu oparte są (chyba) na tzw. JFrame’ach. Aby nimi sterować musimy się dostać do obiektu odpowiedzialnego za konkretne okno w aplikacji. Na początku trzeba utworzyć uchwyt do JFrame’a:
Okienka w Processingu oparte są (chyba) na tzw. JFrame’ach. Aby nimi sterować musimy się dostać do obiektu odpowiedzialnego za konkretne okno w aplikacji. Na początku trzeba utworzyć uchwyt do JFrame’a:
 Skoro jest zapis plików, to warto nie stracić swojej pracy przez nieumyślne zamknięcie programu – pojawi się stosowne okienko z potwierdzeniem (było przy
Skoro jest zapis plików, to warto nie stracić swojej pracy przez nieumyślne zamknięcie programu – pojawi się stosowne okienko z potwierdzeniem (było przy