Nie jeden, a kilka LEDów i zabawa w wężyki…
(c) K.G. 2021

Nie jeden, a kilka LEDów i zabawa w wężyki…
(c) K.G. 2021
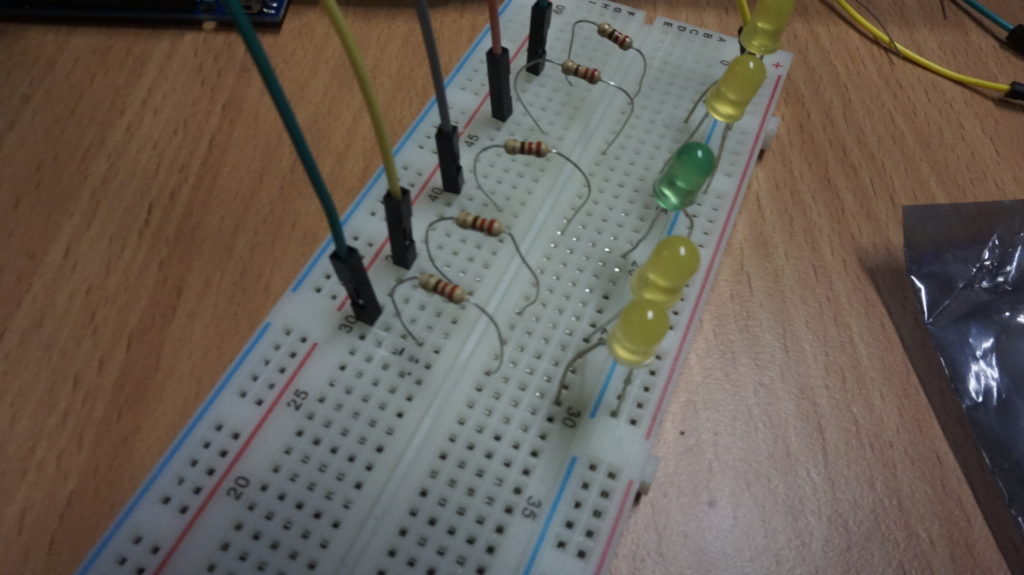
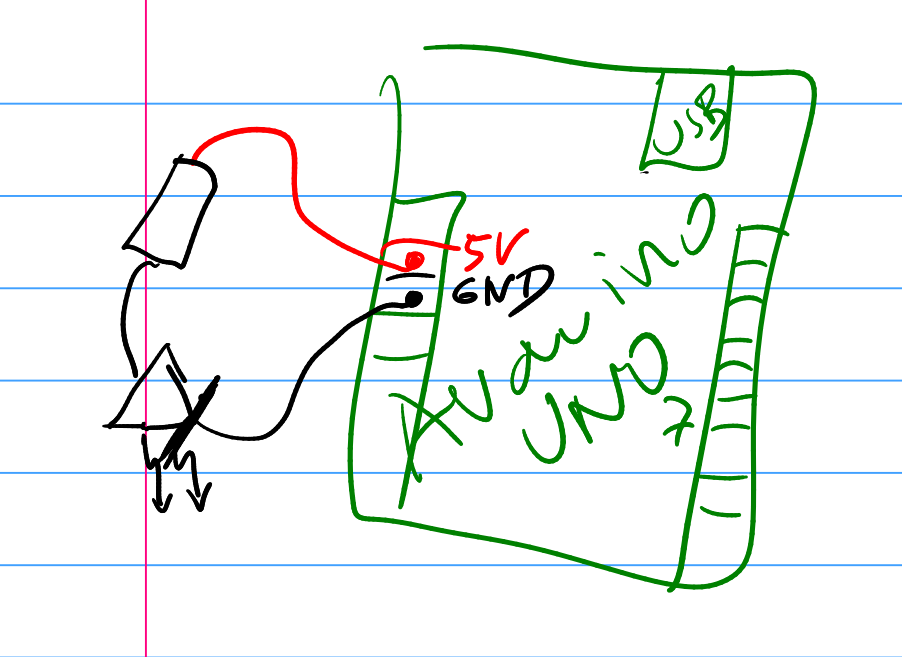
Ustaliliśmy, że spotykamy się w piątki o 12:15 (ale mamy czas tylko do 13:30). Zaczynamy od zera – czyli wyjaśnień, jak działa LED i do czego jest potrzebny rezystor w obwodzie. Znaczy nie wyjaśniłem jak działa LED ale omówiłem jego funkcję w obwodzie elektrycznym. No dobrze, Panowie wiedzieli to i owo, ale te informacje należało podać i wyjaśnić wątpliwości (a były takie! z istotniejszych: czy kolejność opornika i LEDa ma znaczenie? NIE!). Jeszcze bez podłączenia Arduino sprawdziliśmy działanie układu zasilanego akumulatorem żelowym 6V, mierzyliśmy prąd, napięcia… nuda? Może. Ale niezbędna. Sprawdzialiśmy, jak świeci LED z oporikiem 10 000 omów, 470 omów a nawet jak z 22 omami (info na końcu wpisu). Dopiero potem podłączyliśmy płytkę Arduino UNO – dowiedzieliśmy się, co to są piny GND, 3.3V oraz 5V. Sprawdziliśmy multimetrem napięcie (a jakże!). A potem podłączyliśmy LED-a do 5V. Działa!
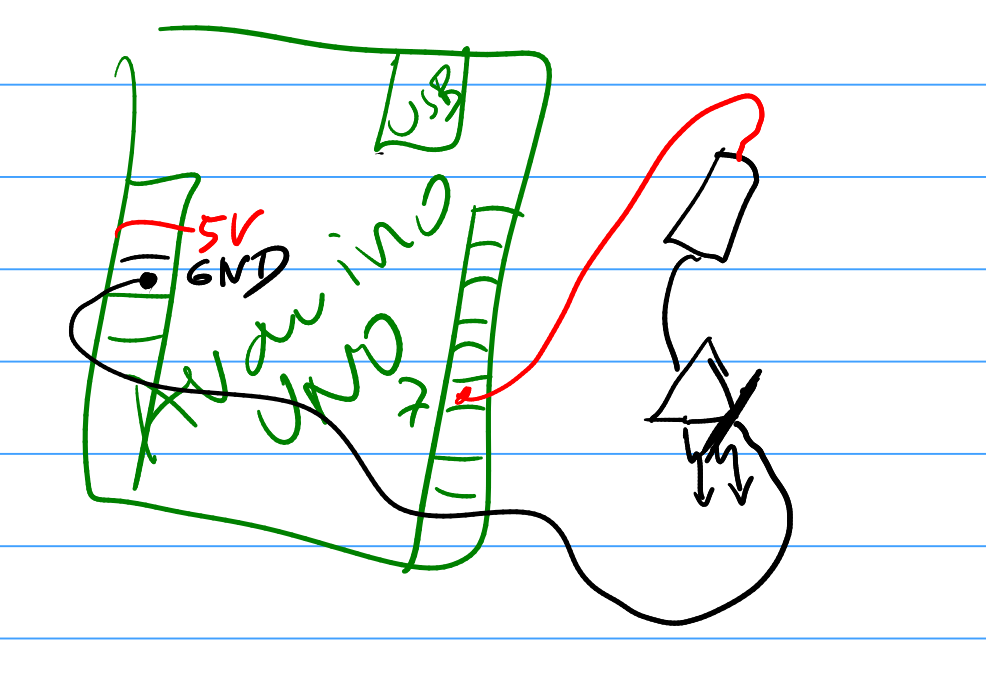
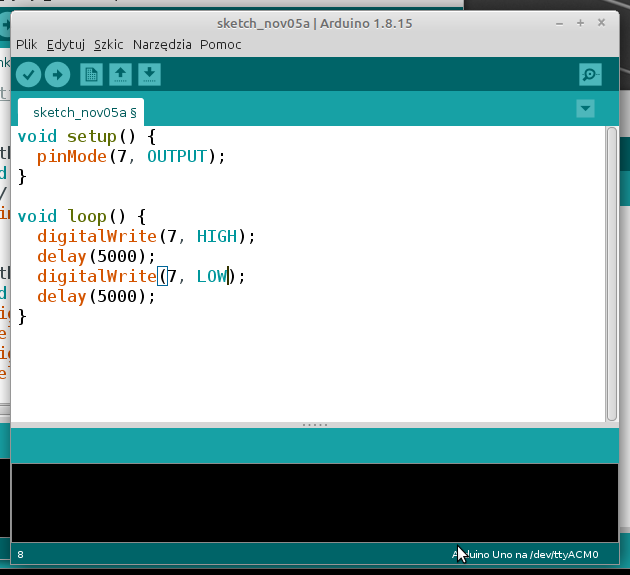
OK, ale Arduino się programuje… Więc uruchomiliśmy darmowe Arduino IDE i napisaliśmy pierwszy programik – świecący co 5s LEDem podłączonym do pinu cyffrowego numer 7 – dlaczego akurat 7? a dlaczego nie 😉 Mamy do wyboru 14 sztuk pinów cyfrowych (numerowane od 0 do 13), to któryś trzeba było wybrać.
Program wymagał wyjaśnienia, gdzie jest funkcja main() z języka C/C++, co robią funkcje setup() oraz loop() a także co to są pinMode(), digitalWrite() oraz delay(). Mam nadzieję, że było w miarę jasno (choć oczywiście – pytania w głowie buszują, z czasem znajdą się na nie odpowiedzi….).
Następnie bawiliśmy się w zmianę czasu trwania świecenia/nieświecenia LED-a. Ustawiliśmy w funkcjach delay() czas 1000 s (czyli 1 s), potem 100 ms a nawet 10 ms (czyli 100x na sekundę!). Oczywiście w tym ostatnim przypadku nie udało się zaobserwować błysków, a jedynie ciągłe świecenie. Przy tej okazji ponowne wróciliśmy do multimetru i sprawdziliśmy, jaki pomiar wskaże urządzenia. Dowiedzieliśmy się co-nieco o uśrednianiu pomiarów przez multimetr.
Ale ta zabawa w zmianę czasu doprowadziła nas do sprawdzenia zdolności percepcji człowieka – sprawdziliśmy, czy oko rejestruje zmiany częściej niż 24x na sekundę (chyba mamy tu jakiegoś amatora filmów!). Udało się. Nie wiesz o co chodzi? To zapraszam na koło w kolejny piątek 😉
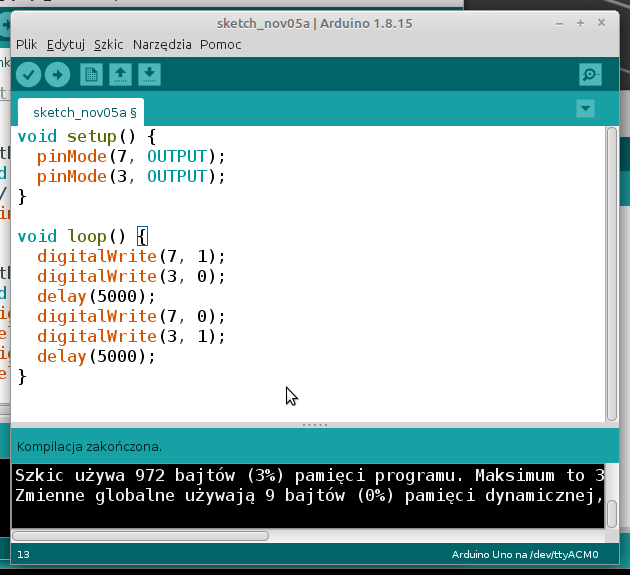
A może dwa LEDy? Spróbowaliśmy świecić na przemian!
Potem każdy ze studentów dostał w prezencie Arduino UNO…. wirtualnie 😉 zachęcam do ponowienia zabawy w TInkerkadzie.
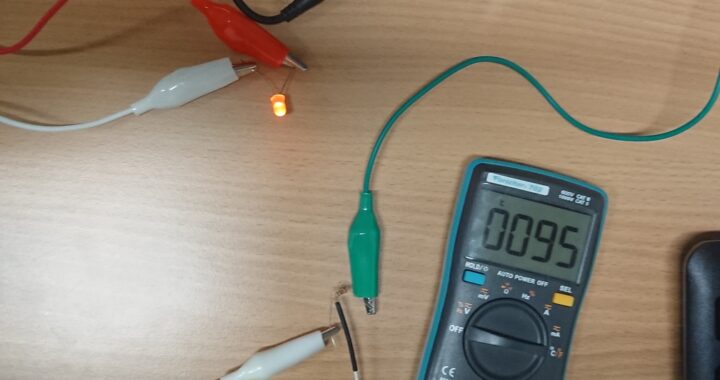
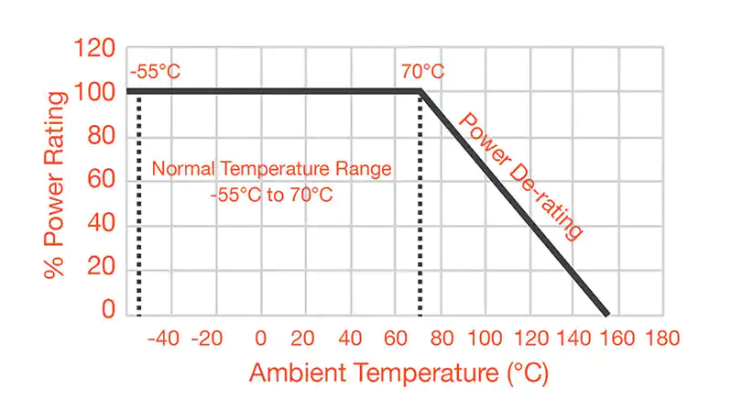
I jeszcze jedno: chciałem spalić LED-a. Podałem opornik 22 omów do zasilania 6.3V i…. spodziewałem się szybkiego BUM! A tu przez ponad godzinę LED nie poddawał się, przyjmował okolo 138 mA prądu i świecił (no dobrze, zmienił barwę na pomarańczową – z żółtej – ale wytrzymał). Temperatura na rezystorze to nawet ponad 100C więc taki układ to zdecydowanie błąd w sztuce – ale o dziwo działał u nas przez godzinę (a może i dłużej, ale go rozłączyłem). Nie róbmy tak zbyt często – pamiętajmy, że LEDy „lubią” prąd do ~20mA, choć i tak polecam <10mA bo już wtedy świecą bardzo wyraźnie.
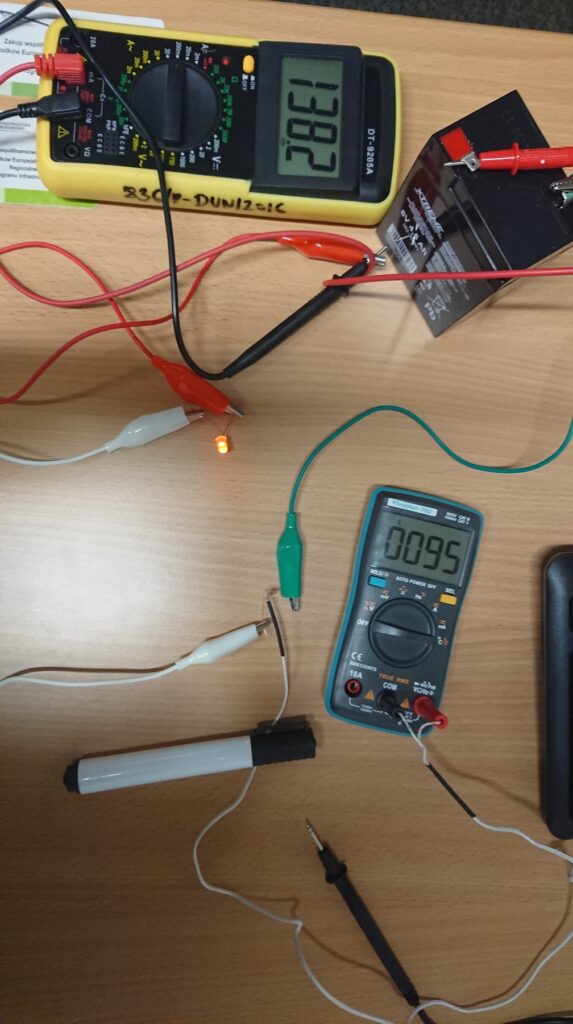
Zachęcam do zastanowienia się nad powyższym układem: czy wskazania amperomierza się zgadzają z przewidywaniami teoretycznymi? Opornik w obwodzie to 22 ohm, zasilanie 6.3V. Śmiało przelicz sam! Coś się jakby nie zgadza? Może warto kliknąć w obrazek poniżej o poczytać trochę?
(c) K.G. 2021

Zgodnie z rozmowami podczas Forum Kół Naukowych UwB w dn. 25 października 2021r. przypominamy o wspólnej inicjatywie z Białostockim Parkiem Naukowo Technologicznym.
BPNT prowadzi Epi-Centrum Nauki w Białymstoku. To największa tego typu placówka w tej części Polski, służy edukacji i poznawaniu poprzez zabawę praw fizyki i matematyki, zjawisk przyrodniczych, zmian klimatycznych, nowoczesnych technologii.
https://epi-centrum.bialystok.pl/pl
W ramach współpracy z BPNT organizowane będą darmowe warsztaty z metody twórczego projektowania i rozwiązywania problemów Design Thinking (podejście do tworzenia nowych produktów i usług w oparciu o głębokie zrozumienie problemów i potrzeb użytkowników). Warsztaty poprzedzone będą zwiedzaniem i oglądaniem Epi-Centrum Nauki na Stadionie Miejskim. Cel warsztatów to poznanie metody oraz zaprojektowanie przy zastosowaniu zasad Design Thinking kolejnych eksponatów do Epi-Centrum Nauki (pod szyldem UwB).
Zbieramy teraz zgłoszenia z poszczególnych kół naukowych. Prosimy do podanie nazwy koła i liczby osób chętnych do udziału w projekcie. Termin zgłoszeń mija z końcem tygodnia (do 31.10.2021). Na początku listopada chcemy przekazać informację do BPNT o zainteresowaniu naszym oraz ustalić termin zwiedzania Epi-Centrum.
W powyższych kwestiach – proszę kontaktować się z opiekunem koła.
(c) K.G. 2021
W poniedziałek (25.10.2021) – o godzinie 18:00 odbędzie się I Forum Kół Naukowych w roku akademickim 2021/2022. Forum odbędzie się za pośrednictwem platformy Blackboard. Link do spotkania: https://eu.bbcollab.com/collab/ui/session/guest/7412060f4b14424694e4a025219494f9?fbclid=IwAR2nJYaJ7aHLDGiJDAjK-Fb5WVtmTP_cY6oPHaCjfiRL-A2I7fNumuhKLu4
Program spotkania:
1. Przywitanie uczestników Forum Kół Naukowych UwB – Prorektor ds. studenckich dr hab. Jolanta Muszyńska, prof. UwB
2. Prezentacja strony Internetowej Forum Kół Naukowych – Tomasz Krynicki.
3. Koła naukowe UwB w Epi-Centrum Nauki – prezentacja wspólnego projektu – Dyrektor Białostockiego Parku Naukowo-Technologicznego Anna Daszuta – Zalewska.
4. Prezentacja wybranych Kół Naukowych i Organizacji Studenckich.
5. Dyskusja.
Z poważaniem
Aneta Walendziuk
Sekretariat Prorektor ds. studenckich, Uniwersytetu w Białymstoku
Ewa Putra
Przewodnicząca Komisji ds. Współpracy z Kołami Naukowymi i Organizacjami Studenckimi
Parlament Studencki UwB
(c) K.G. 2021
Zapraszam na spotkanie koła Fi-BOT w środę, 20-go października 2021 o godz. 13:30 do sali 2045. Przedstawię zainteresowanym osobom tematykę spotkań, pochwalę się najlepszymi projektami a także poznam Państwa oczekiwania i umiejętności. Zastanowimy się nad dogodnym terminem spotkań. Zapraszam!
Update: proponuję ponowne spotkanie, w piątek 29-X-2021 o godz. 12:15 (pokój 2045) – powinno być wygodnie dla 1szego roku FGKiR (inne osoby: kontakt indywidualny).
(c) K.G. 2021
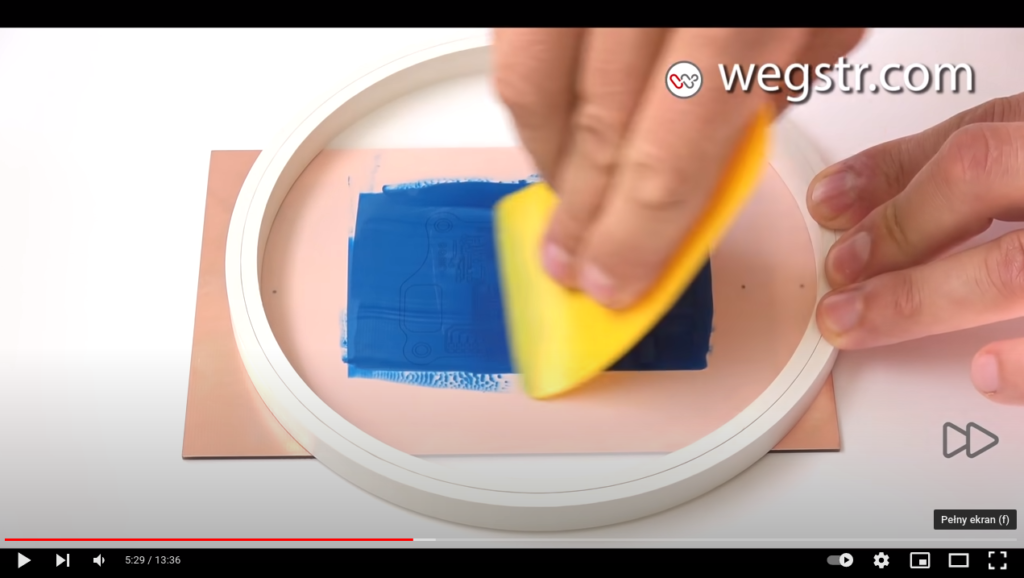
Problemy z solder maską polegają na jej rozprowadzeniu po powierzchni płytki tak, by tworzyły równą warstwę. Inną metodą niż praktykowana w poprzednim wpisie jest wykorzystanie siatki do sitodruku – jak na poniższym filmiku.
To rozwiązanie wydaje się być idealne – jednak jaką siatkę do sitodruku dobrać? Jest ich mnóstwo, różnią się wielkością oczek (i grubością nitek). Sprzedawane są na metry bieżące w cenie około 60-80 zł/mb. Przykład ze sklepu SitoFach:

Czyli trzeba wybrać kilka i popróbować… dość droga zabawa jak na testowanie (nie mamy najmniejszego doświadczenia z takim procesem, a szukanie w internecie nic nie pomaga!). Dlatego… wysłaliśmy email do białostockiej firmy SitoFach zajmującej się dystrybucją takiego asortymentu i poprosiliśmy o darmowe próbniki. Okazało się, że właścieciel firmy SitoFach z chęcią postanowił nam pomóc i bezpłatnie udostępnić próbki różnych siatek!
Pan Bartek ochoczo przystąpił do nałożenia farby metodą z prezentowanego na początku filmiku i efekt jest bardzo zadowalający! Farba rozłożona jest równomienie, po utwardzeniu promieniowaniem UV nie przykleja się do siatki przy zdejmowaniu – o to właśnie chodziło!
Jeszcze raz dziękujemy właścicielowi firmy SitoFach za udostępnienie różnych siatek – bardzo nam to pomogło! Dobrze wiedzieć, że są ludzie skłonni pomóc w realizacji studenckiej pasji 😉
(c) K.G. 2021

Solder maska czyli maska lutownicza to warstwa lakieru o odpowiednich własnościach naniesiona na wykonany już gotowy obwód drukowany. Osłania ona ścieżki w tych miejscach obwodu, w których nie są one lutowane. Jej nałożenie to ostatni element po frezowaniu ścieżek, ale nie jest to takie łatwe…
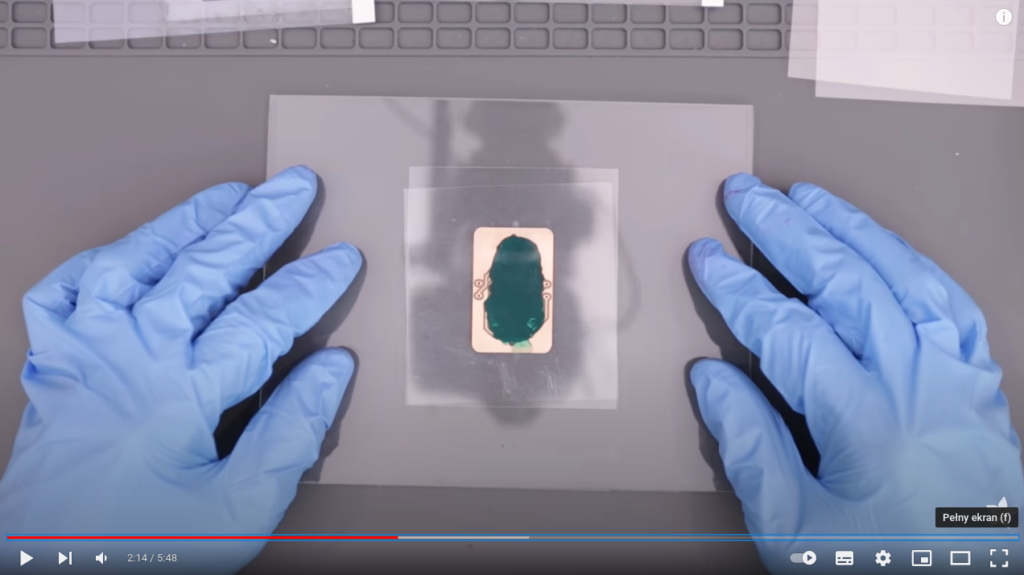
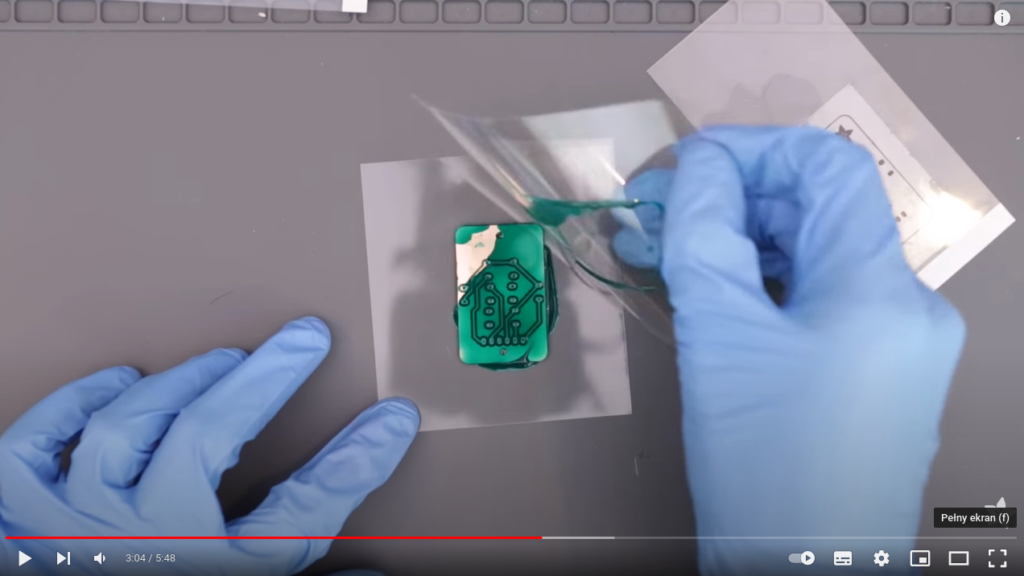
Jedna z chałupniczych metod polega na naniesieniu farby na płytkę, a następnie przyciśnięcie folią/szybką do powierzchni tej płytki – farba rozejdzie się równo na wszystkie strony (jest to proces podobny do naklejania szybki na smartfona). Po tej procedurze należy użyć lamp UV do utwardzenia farby, a następnie zdjąć szybkę… Właśnie ta ostatnia czynność sprawia największy problem – podczas zdejmowania szybki farba często się przykleja i zrywa razem z szybką! niszczy się w ten sposób całą pracę… Poniżej kilka klatek z filmu na YT przedstawiającego ten proces – gdzie autor opanował tą technikę i w końcu udaje mu się robić dobre płytki (choć sam przyznaje, że nie jest to ani łatwe, ani powtarzalne):

Jak sam autor powyższego filmu z YT przyznaje, nie jest to łatwy proces – ale po wielokrotnym praktykowaniu możliwy do nauczenia. Jednak aktualnie Panu Bartkowi się nie udaje …
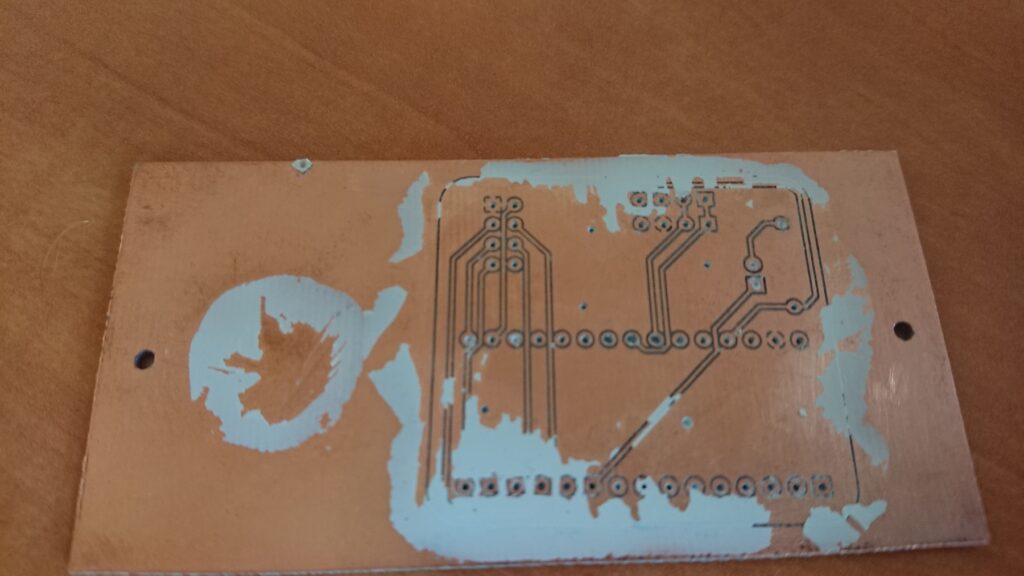
Najsłabszym ogniwem jest zdejmowanie tej folii…
(c) K.G. 2021
Projekt płytki został lekko zmieniony: mamy arduino Nano + LED + rezystor + wyprowadzenie na nRF24 (spi) oraz na OLED i2c. Grubość ścieżek 0.4 mm (choć z poprzedniego tygodnia testów wiemy, że i 0.25 mm daje radę na tej maszynie). Teraz Pan Bartek skupił się na wierceniu otworów na elementy lutowane – było z tym trochę zabawy 😉
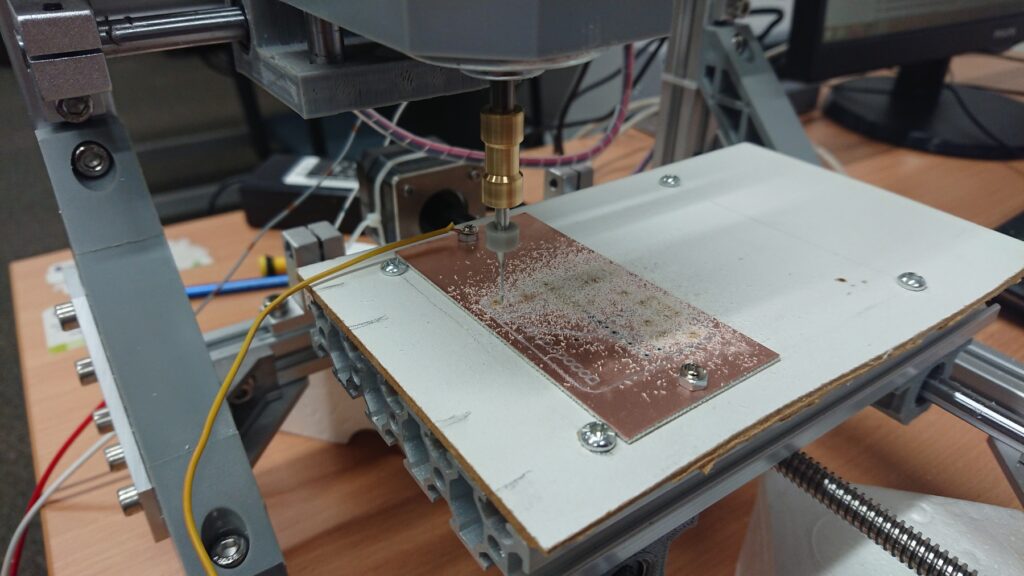
Najpierw zamontowaliśmy płytkę miedzianą do stołu za pomocą dwóch śrub. Poprzednio była taśma dwustronna jako tymczasowe rozwiązanie, teraz to poprawiamy. Dwie śruby to też słaby pomysł, bo płytka po ich dokręceniu wybrzusza się rogami do góry. Oczywiście skanujemy płaszczyznę tworząc mapę wysokości, ale Pan Bartek uparł się na próbkowanie 3×3 😛 Ja proponowałem większe, ale co tam… to nie mój projekt 😉 To skanowanie okazało się jednak za skromne – z prawej strony frezowania wyraźnie słychać było zgrzyty frezu, jakby prowadzony był za głęboko… Na przyszłość trzeba zwiększyć rozdzielczość tej mapy wysokości (tworzy się szybko, więc po co upierać się na 3×3?) i zastosować 4 punkty mocowania (a nie tylko 2).
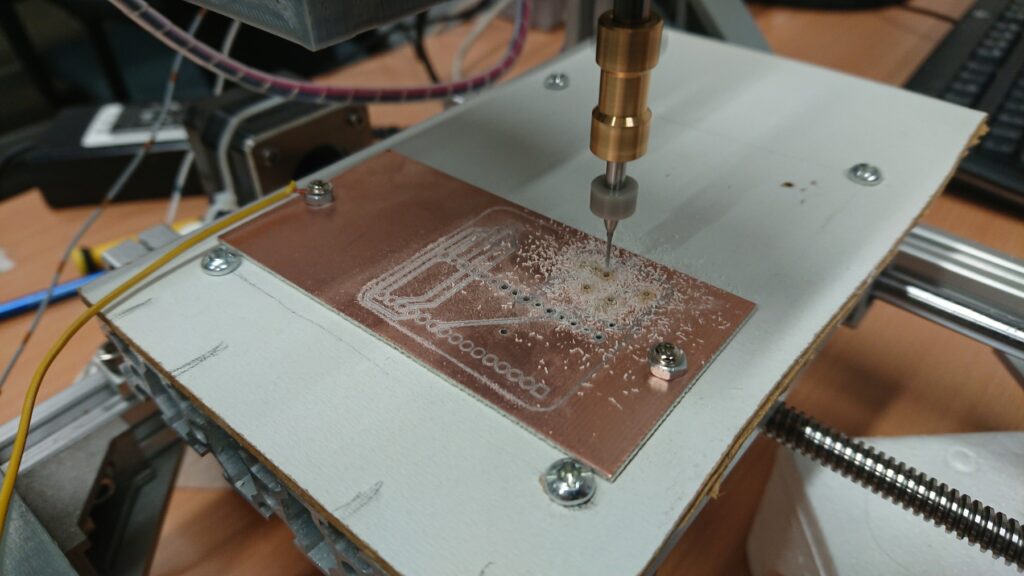
Frezowanie ścieżek zakończone. Teraz dziurki – pierwsze 4 poszły szybko, wiertłem 1.1mm (miało być 1mm, ale opisy na wiertłach takie malutkie, że faktycznie użyliśmy 1.1 mm). Sprawdzilismy, że te otwory są jakby za duże, więc zatrzymaliśmy maszynę i zmieniliśmy wiertło na 0.8mm. Było zabawnie, bo przez nieuwagę zapomnieliśmy o zapisaniu referencyjnego położenia na osi Z (pomimo kalibracji wykonanej zgodnie ze sztuką). W wyniku tego otwór chciał się przewiercić przez stół 😉 Miny głębokość wiercenia 3mm, ale jak się ma źle ustawioną oś Z to te 3mm oznacza przewiercenie na wylot stołu. Dlatego szybko praca maszyny została przerwana przez odłączenie zasilania (w prawdziwych maszynach jest taki czerwony grzybek – awaryjne wyłączenie, ale tutaj wtyczka zasilania i tyle w temacie). Uff… ale ale – chcemy kontynuować pracę z przygotowaną płytką, i wywierconymi już 4 otworami. W czym problem? Aktualnie pracujemy na maszynie bez krańcówek, czyli punkt (0,0) na osiach (x,y) został wybrany dowolnie. Po odłączeniu zasilania nie mamy już tej informacji! Co zrobiliśmy? Ręcznie nakierowaliśmy wiertło nad pierwszy otwór – tak „na oko”, ja mówiłem „jeszcze trochę w lewo”, a Pan Bartek i tak robił swoje 😉 Następnie podejrzeliśmy pierwsze instrukcje G-CODE i zobaczyliśmy, że pierwsza dziurka to instrukcja G00 X18.700 Y25.000. Czyli ręcznie cofnęliśmy wiertło do pozycji startowej – wydając instrukcję G00 X-18.700 Y-25.000. To wystarczyło – mamy poprzednio (sprzed awaryjnego wyłączenie zasilania) ustalony punkt (0,0) i możemy kontynuować pracę wiertła. Udało się.
(c) K.G. 2021
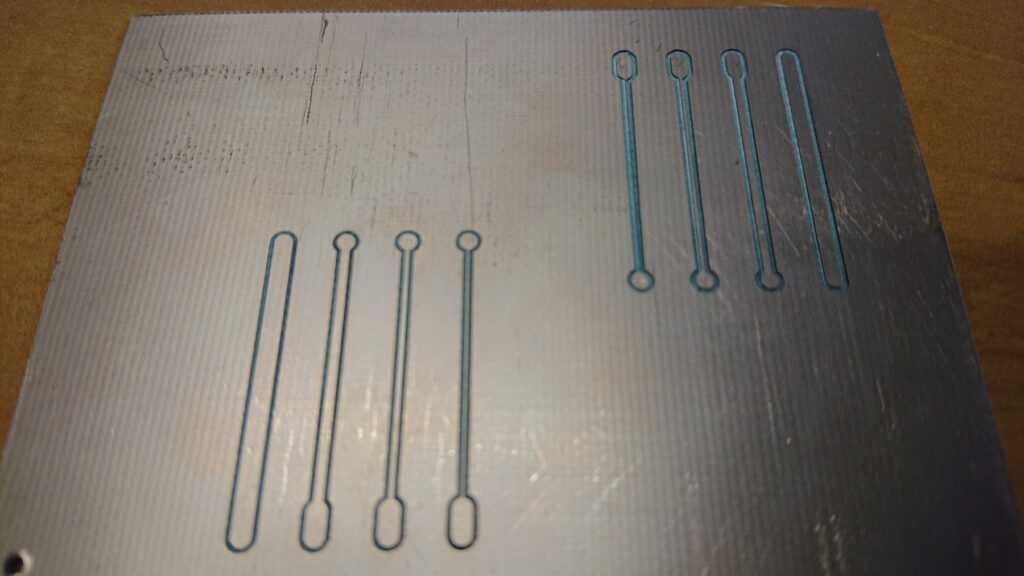
Pan Bartek ulepszył mocowanie stołu – jest teraz stabilny. Zadanie na dziś to sprawdzenie, czy sprzęt jest na tyle precyzyjny, że może wykonać ścieżki o grubości 0.25mm, 0.5mm, 1mm oraz 2mm. Grubość frezu to 0.1mm – powinno się udać, o ile poprawnie skonfigurujemy parametry pracy maszyny CNC.
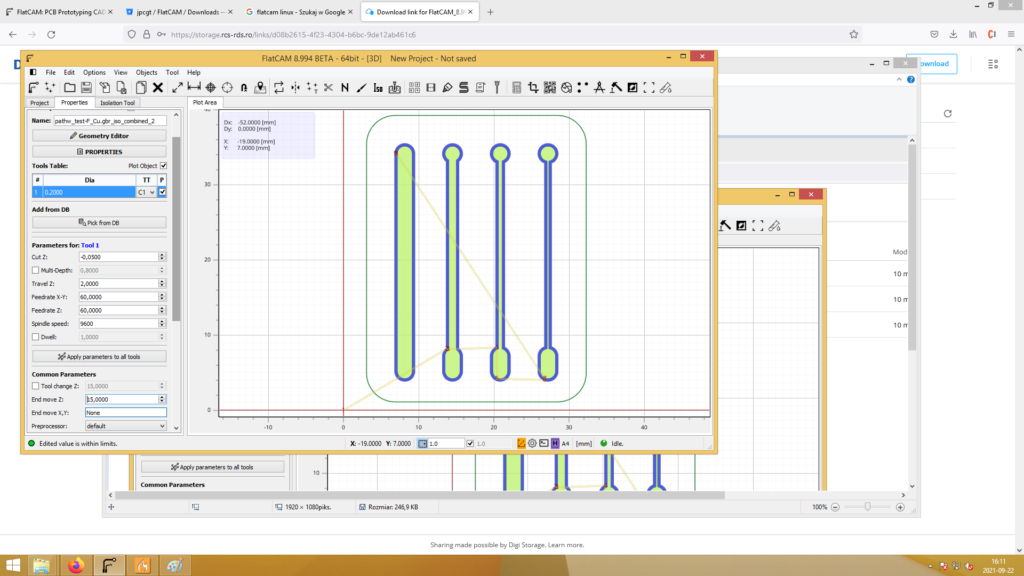
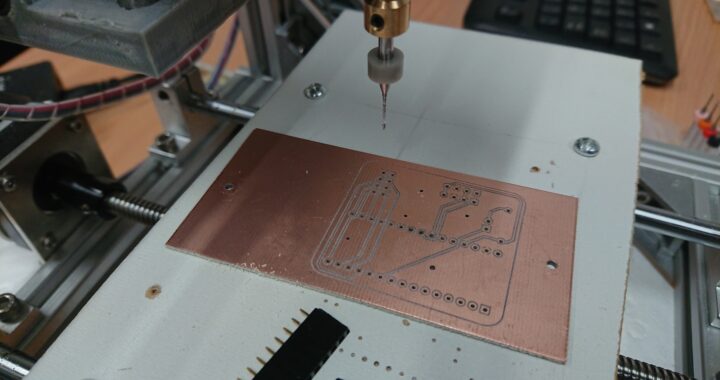
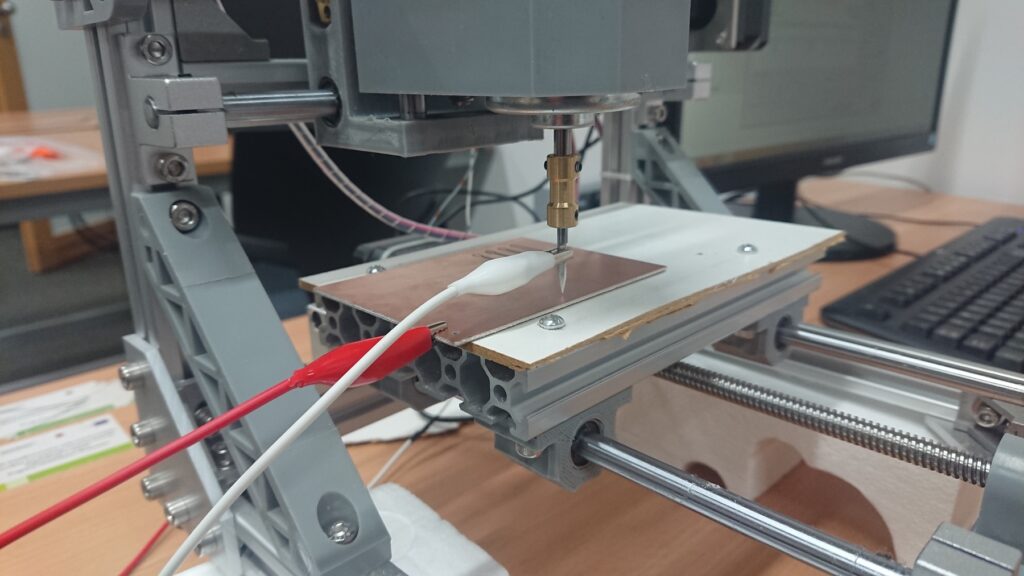
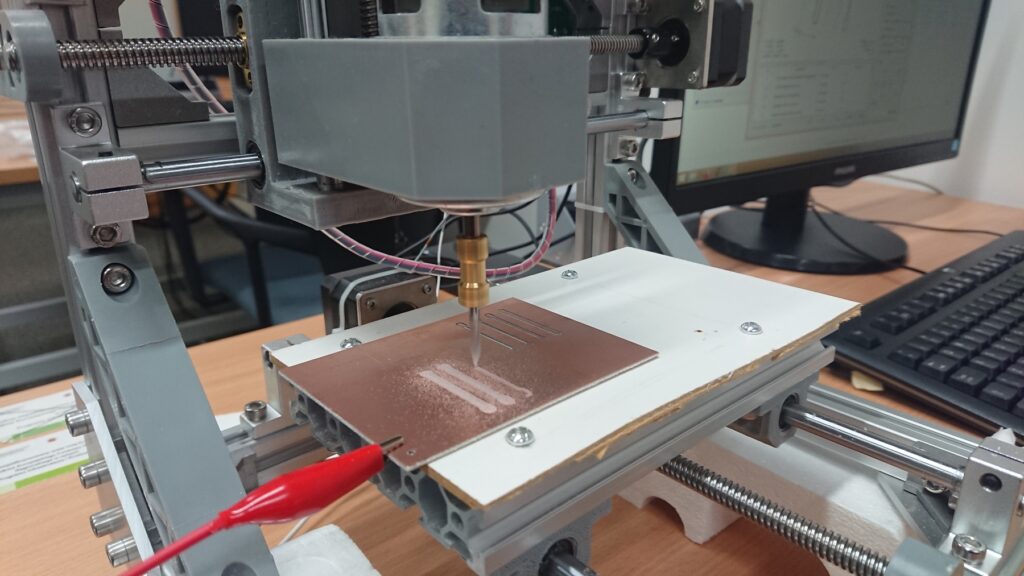
Projekt zawiera wspomniane 4 ścieżki, zakończone polami: padami do lutowania (dół) oraz miejscami na wywiercenie otworów (fi=1mm) do przetkania i przylutowania nóżek rezystorów, LED-ów czy scalaków. Poniżej maszyna CNC w trakcie ustawiania mapy wysokości.
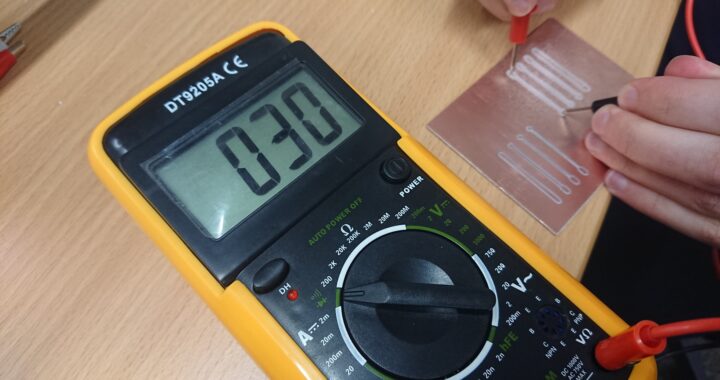
Po 10 minutach pracy (czyszczenie płytki z opiłków tylko zgrubne, „tyle-o-ile”) główny test: przykładamy multimetr i sprawdzamy ciągłość ścieżek (najbardziej interesuje nas najmniejsza – o grubości 0.25 mm).
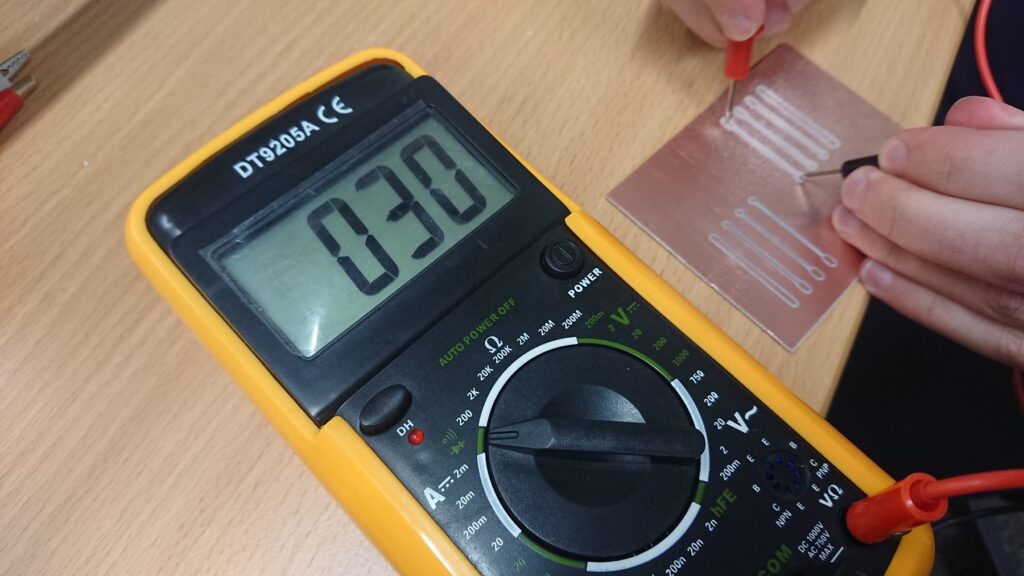
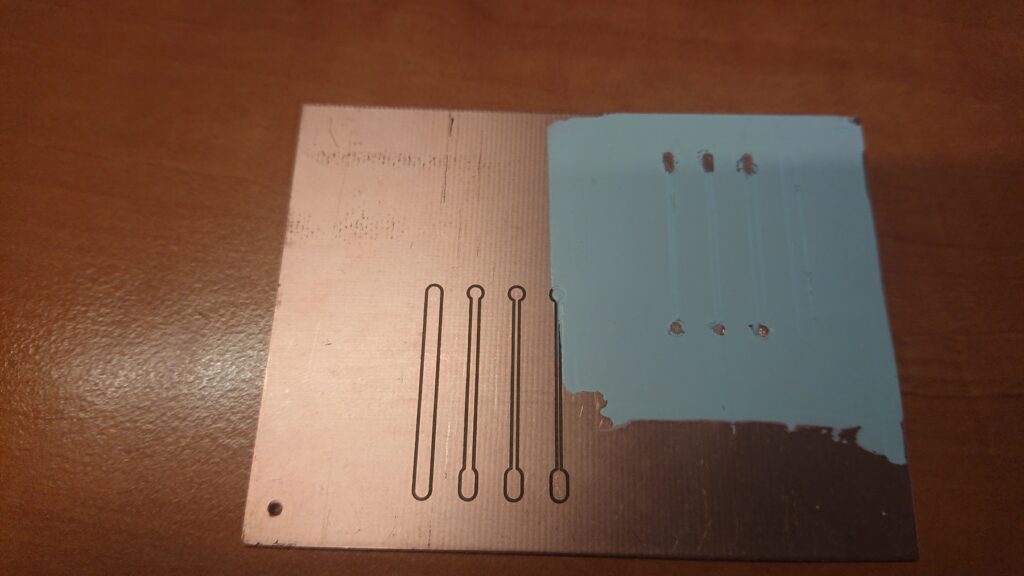
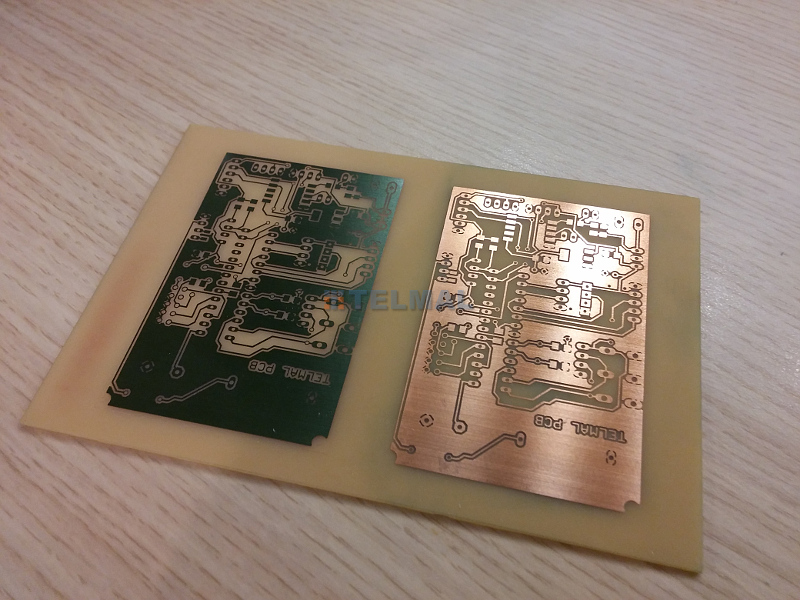
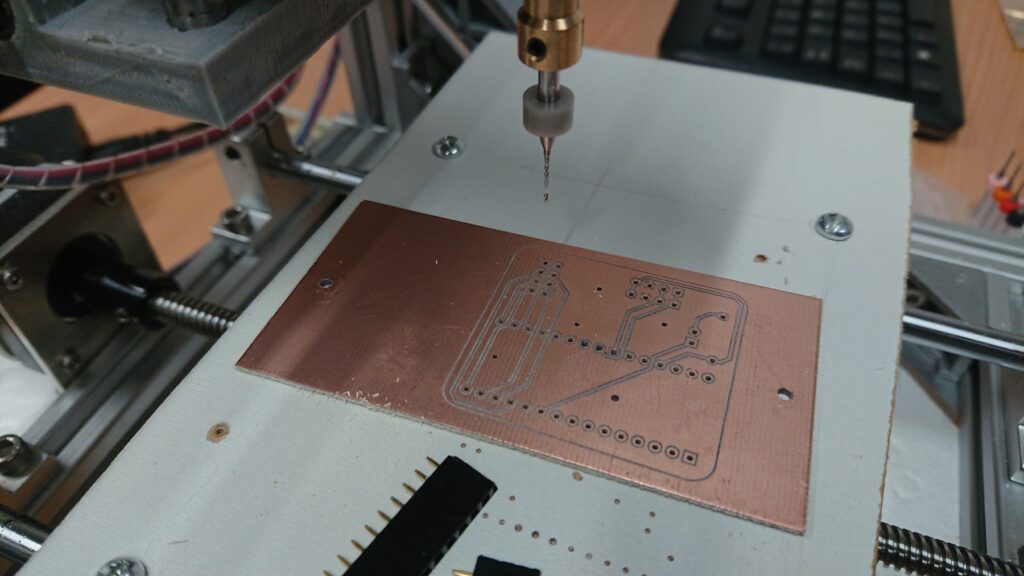
Sukces! Poniżej zdjęcie całej płytki:
Tytułem wyjaśnienia dodam o co tutaj chodzi: cała płytka pokryta jest miedzią, która obrabia się według projektu tak, aby odciąć ścieżki od zewnętrza. Frez musi pracować precyzyjnie, aby pozostawił miedź wewnątrz ścieżki – co się nie udało za pierwszym razem (najcieńsza ścieżka jest „wyryta” frezem zbyt głęboko i nie ma wcale miedzi – nie przewodzi).
Opis kroków do wykonania (w przygotowaniu)
(c) K.G. 2021
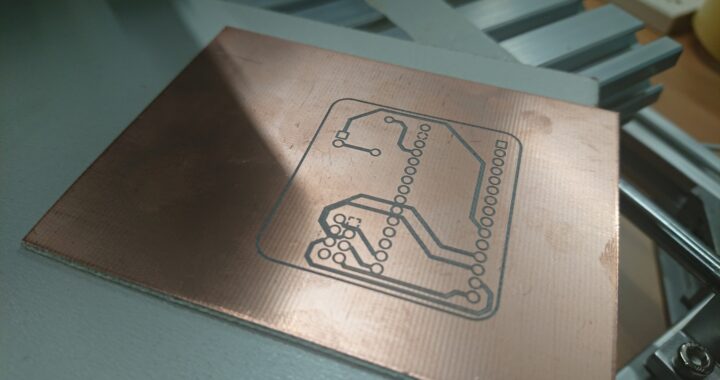
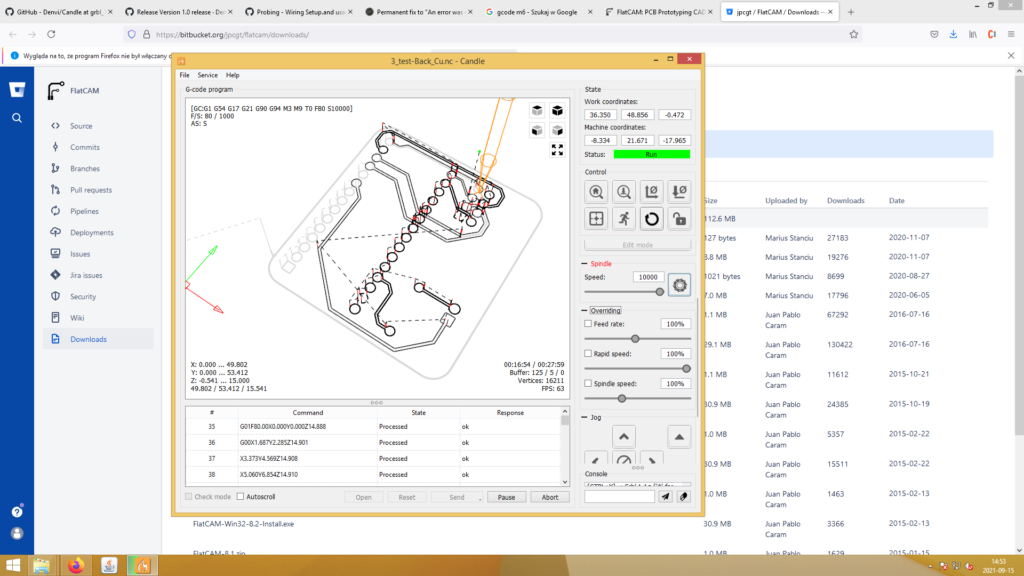
Dziś Pan Bartek testował wydziałową frezarkę CNC w zastosowaniu do przygotowania płytek PCB. Najpierw przygotował projekt pierwszej płytki w KiCad-dzie, który składa się z Arduino Nano + moduł nRF24L + LED + rezystor (polecamy filmik na YT z tutorialem jak pracować w KiCadzie). Dalej wczytał wyeksportowany plik do GRBL-u w Candle i podłączył frezarkę. Candle to fajny program, intuicyjny i pomimo dość skomplikowanie wyglądającego interfejsu – da się zrozumieć o co w nim chodzi. Jedyny minus to to, że jest 32-bitowy: dlatego uruchomiliśmy go pod Windowsem, który wspiera prehistoryczne aplikacje 🙂 W międzyczasie zająłem się wersją na Linuxa (na końcu wpisu wersja 64 bit do pobrania). Aby nie tracić czasu sterowanie frezarką odbywało się z Windowsa.
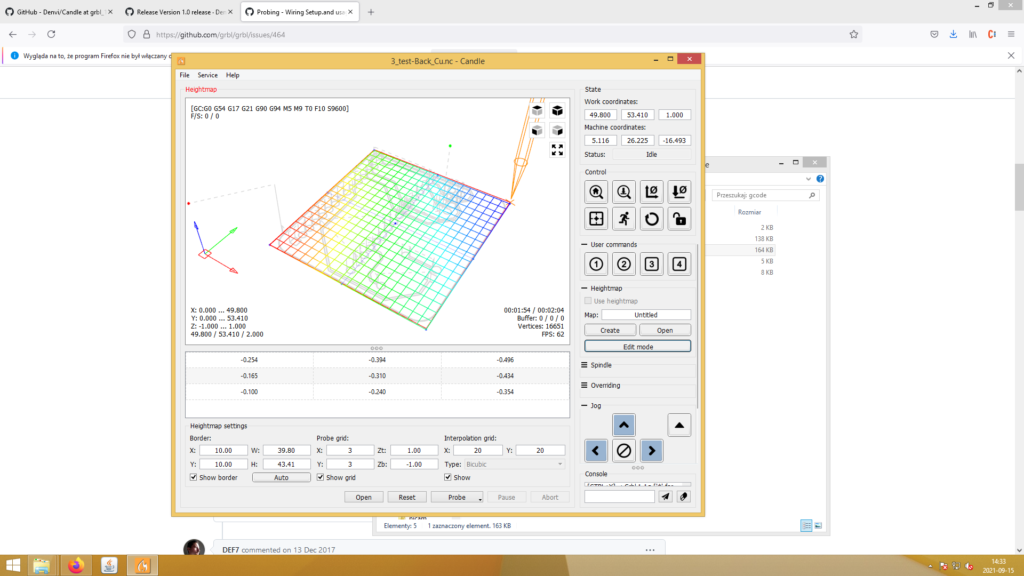
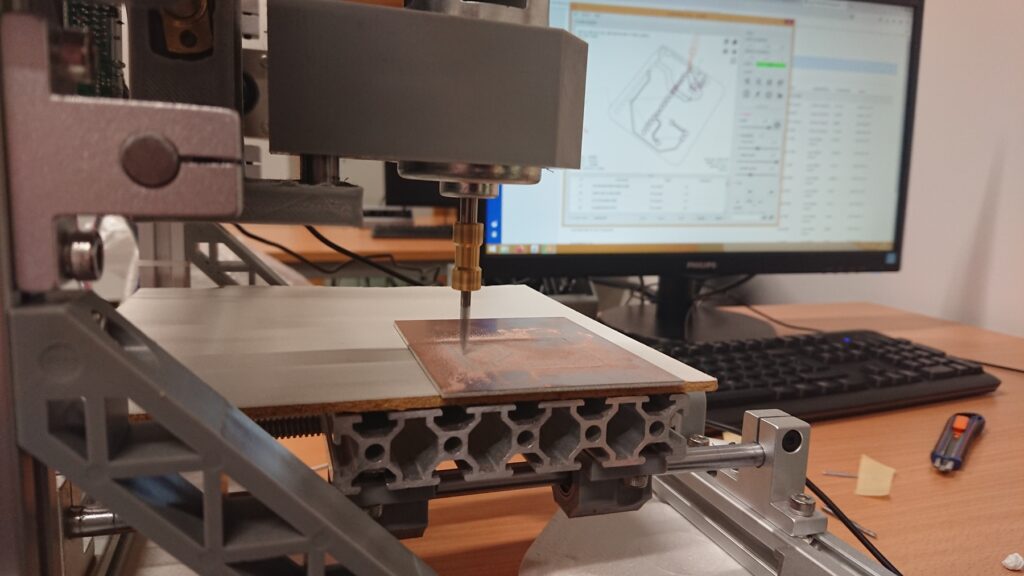
Konfiguracja frezarki polegała na poprawnym podłączeniu, zdefiniowaniu pozycji startowej (punkt 0,0, czyli „dom”), stworzenie mapy wysokości (skanowanie kierunku na osi Z). Chwilowo używamy dwustronnej taśmy przylepnej, niebawem będzie coś odpowiedniejszego.
Efekt końcowy po 30 minutach pracy (no i po wyczyszczeniu płytki z opiłków):
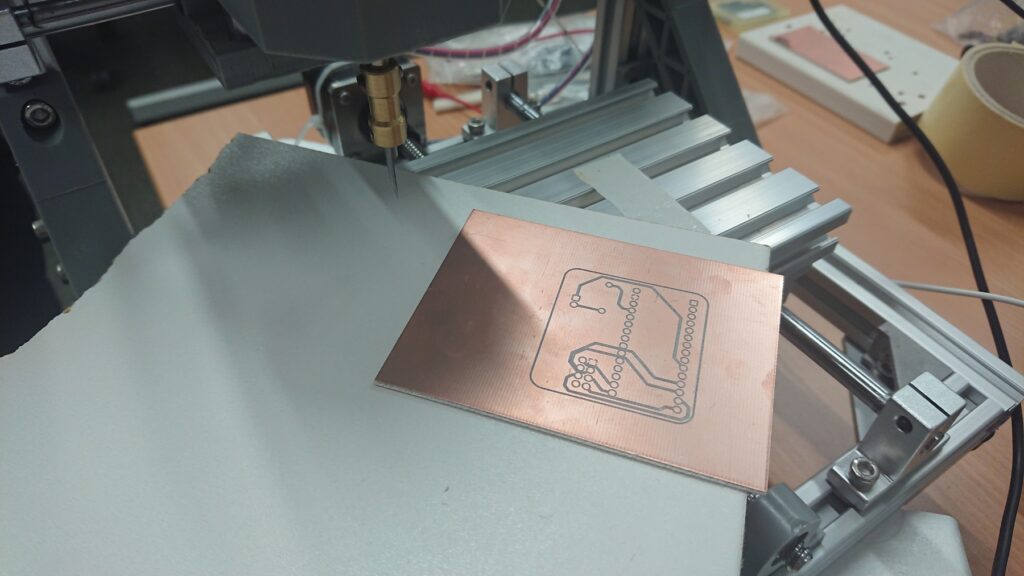
Ciągle jest jeszcze sporo pracy przed ostatecznym przygotowaniem płytki (np. wywiercenie otworów). Jak na razie cieszymy się, że wszystko zadziałało (nawet pomimo tymczasowego mocowania stołu i płytki – na taśmę dwustronną). Niestety, ścieżki są miejscami połączone, ale to wina a) mocowania stołu, b) luzach na głowicy frezującej lub c) złego zdefiniowania parametrów frezu w Candle. Projekt do poprawki, ale i tak jesteśmy zadowoleni 😉
Jak wspomniałem na początku wpisu, z repozytorium githuba pobiera się archaiczną wersję 32-bitową (niezależnie czy Win czy Linux). Windows zawsze był przestarzały więc obsługę aplikacji 32-bitowych ma wszyte w system, pomimo faktu, że jest systemem operacyjnym 64-bitowym. Dla Linuxa (oczywiście 64-bitowego) musiałem zainstalować pakiet ia32-libs aby umożliwić działanie starych programów. Na szczęscie nie trzeba się męczyć w ten sposób. Można przekompilować źródła i mieć własną wersję 64-bit. Dla dystrybucji bazująych na Ubuntu (czyli np. Ubuntu, Mint) należy mieć zainstalowane biblioteki QT5 (patrz krok 0), pobrać źródła (krok 1), wykonać konfigurację i kompilację (krok 2) a potem pobrać wersję v1.1, rozpakować (krok 3) i podmienić plik wykonywalny 32-bitowy Candle na właśnie skompiowany plik 64-bitowy (krok 4). Poniżej kilka instrukcji z poszczególnymi krokami.
(krok 0 - biblioteki)
sudo apt install qt5-default qt5-qmake libqt5serialport5-dev
(krok 1 - źródła)
cd
git clone http://github.com/Denvi/Candle.git
Klonowanie do „Candle”...
warning: przekierowanie do https://github.com/Denvi/Candle.git/
remote: Enumerating objects: 5618, done.
remote: Counting objects: 100% (55/55), done.
remote: Compressing objects: 100% (37/37), done.
remote: Total 5618 (delta 29), reused 36 (delta 18), pack-reused 5563
Pobieranie obiektów: 100% (5618/5618), 35.47 MiB | 5.36 MiB/s, gotowe.
Rozwiązywanie delt: 100% (4166/4166), gotowe.
(krok 2 - konfiguracja)
cd ~/Candle/src/
qmake
make
(krok 3 - binarki 32-bit)
wget http://github.com/Denvi/Candle/releases/download/v1.1/Candle_1.1.7.tar.gz
sudo tar -xf Candle_1.1.7.tar.gz -C /opt/
(krok 4 - podmiana na 64-bit)
cd /opt/Candle
sudo mv Candle Candle.32bit.old
sudo cp ~/Candle/src/Candle .
(krop 5 - sprawdzenie)
file Candle
Candle: ELF 64-bit LSB shared object, x86-64, version 1 (SYSV), dynamically linked, interpreter /lib64/ld-linux-x86-64.so.2, BuildID[sha1]=e1cb49635ed9370e88b3744ca76c0990403ad2b0, for GNU/Linux 3.2.0, not strippedDla leniwych wykonywalny Candle (wersja 64-bit) do pobrania tutaj (md5sum: dbcade0a80bc555d4ec3cbaba9105852).
(c) K.G. 2021