
Rozwija się projekt POJAZDU, a jednocześnie nauczane są podstawy Arduino (i programowania) – jest więc mały chaos…
- POJAZD
- konstrukcja: podstawa z płyty wiórowej 18mm wymieniona na sklejkę 10mm, czyli cieńszą, aby koła pojazdy miały większy „prześwit”
- silniki to Pollolu 37Dx70L z wbudowanym enkoderem – silnik ma przekładnię 70:1 dzięki której na dość małych obrotach (150 obr/min) uzyskuje moment obrotowy 1,39 Nm (co oznacza 14 kg*cm). Dodatkowo możemy oprogramować enkoder kwadraturowy o rozdzielczości 64 impulsy na obrót (po przełożeniu 4480 impulsów na obrót).

- Zasilanie silnika to 6V do 12V – co przekłada się odpowiednio na na obroty: 75 rpm do 150 rpm i na pobór prądu: średniego 250/300mA i maksymalnego 2.5A/5A. Widać, że będziemy potrzebować mocnego sterownika do tych silników (typowy L298 da radę z maksymalnie 1A – tylko!)
- Koło do tego silnika to oryginalne Pollolu 12cm
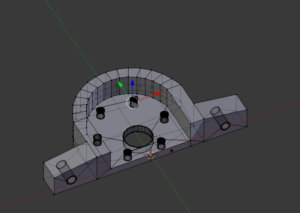
- Mocowanie silnika to wydrukowane w 3D na uczelnianej drukarce „chwytaki” (projekt własny):

- PODSTAWY: LEDy, czyli poznajemy jak włączać/wyłączać napięcie na pinach Arduino. Polecam wirtualne Arduino do zabawy w domu.
KG, 2018