
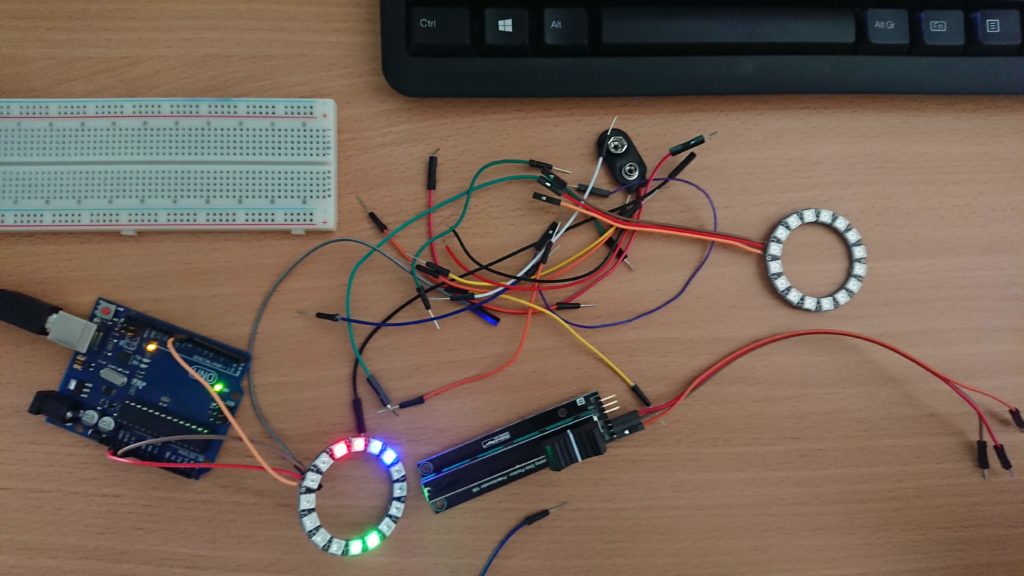
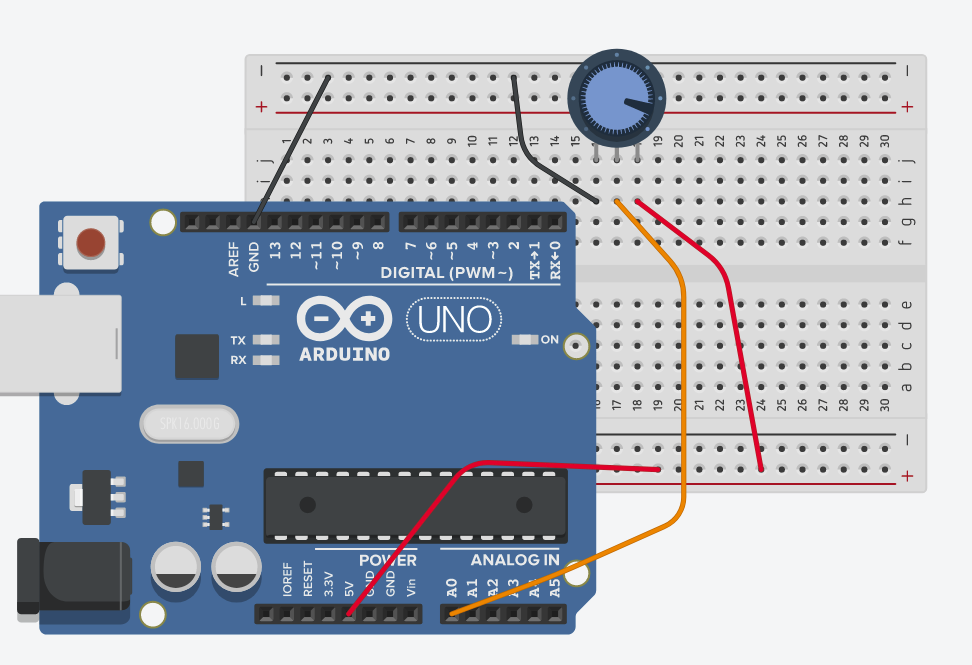
Kolejne spotkanie z kolorowymi paskami LEDów WS2812B zapętlonymi w koło – sterowane potencjometrem. Dla nowych studentów to fajna zabawa – odczytujemy napięcie funkcją analogRead() a efekt przekładamy na wędrujący w kole piksel… Prace trwają 😉
Do zapamiętania:
- elektronika/fizyka: dzielnik napięć
- informatyka: dzielenie całkowite i dzielenie rzeczywiste, rzutowanie typów
- Arduino: sprawdź wartość wyjścia 5V i dostosuj formułki do obliczania odczytanego napięcia
- Arduino: przetworniki ADC – rozdzielczość pomiaru, błąd odczytu.
Efekty w kółku – bez delay()a
Dwie strony naszego kółka wyświetlają różne kolory – rozpoczynamy od góry kółka, gdzie kolejne piksele zapalają się co zadany interwał czasu, a po „dotarciu” do środka kółka – piksele wracają (gaszą się). Ale… lewa strona jest cztery razy szybsza niż prawa strona. Na dodatek nie można używać funkcji delay()!
D E M O
Brawo dla Pana Łukasza!
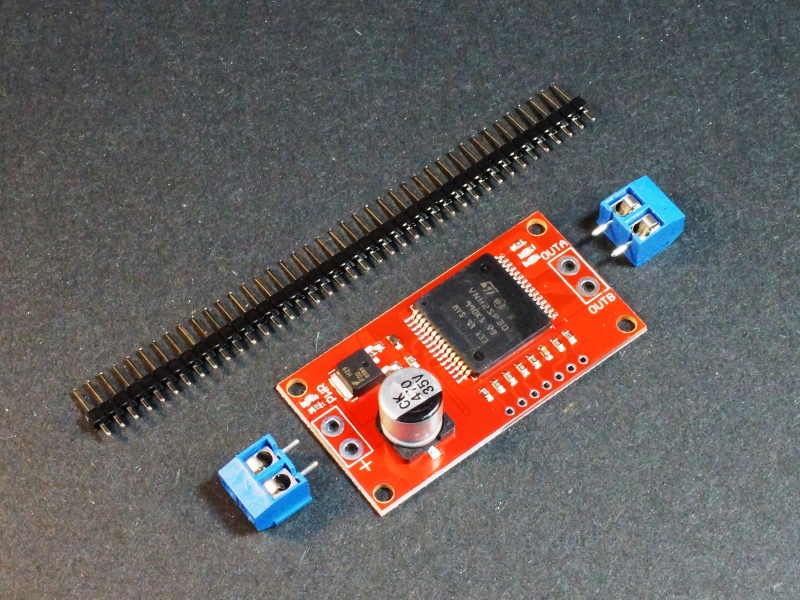
Monster – moduł sterownika silnika DC
Mocny sterownik do silników DC – prąc pracy 12A (chwilowy 30A), napięcie pracy 16 V – bije na głowę poczciwego L293x i dlatego jest MONSTEREM 😉 12A to brzmi dumnie, ale w postaci BEZ RADIATORA to możemy pracować do 6A.
Układ nazywa się VNH2SP30 i jest warty polecenia, ale uwaga – w wielu sklepach (nawet tych renomowanych) można kupić uszkodzone sterowniki, które kręcą kółkami tylko w jedną stronę! Sprzedawcy wymieniają wadliwe sztuki, ale piszę to w celu zaoszczędzenia nerwów – gdy coś nie działa a powinno.
Warto przeczytać opis użycia modułu oraz jego specyfikację, gdy coś nie idzie tak, jak powinno.
Generalnie wszystko jest proste: 5V, GND do odpowiednich na Arduino, INA oraz INB do dowlonych pinów w Arduino, którymi chcemy sterować silniczkiem (tak samo jak w L293x), ale pin PWM musi być podłączony do Arduino – w przeciwnym razie sterowanie odbywa się z ZERO procent mocy. Pin EN (enabled) może być podłączony do 5V w Arduino, choć i tak jest w stanie wysokim, więc układ jest włączony, pin CS to diagnostyczny, na razie pomijamy (odczytuje prąd pracy układu, temperaturę…). Silnik podłączamy do OUTA oraz OUTB, natomiast zasilanie do + (plus) oraz – (minus) po przeciwnej stronie modułu – uwaga na właściwą polaryzację! Tutaj ważne jest ten plus i minus, oby nie odwrotnie!
No i ostatnia ISOTONA kwestia: zasilanie musi być przynajmniej 5.5V, nie może być mniej!
(c) K.G. 2019