Wakacje się kończą, ale to już nasze drugie spotkanie w trakcie wolnego czasu! Brawo dla uczestników. Dziś prace koncentrowały się wokół trzech tematów.
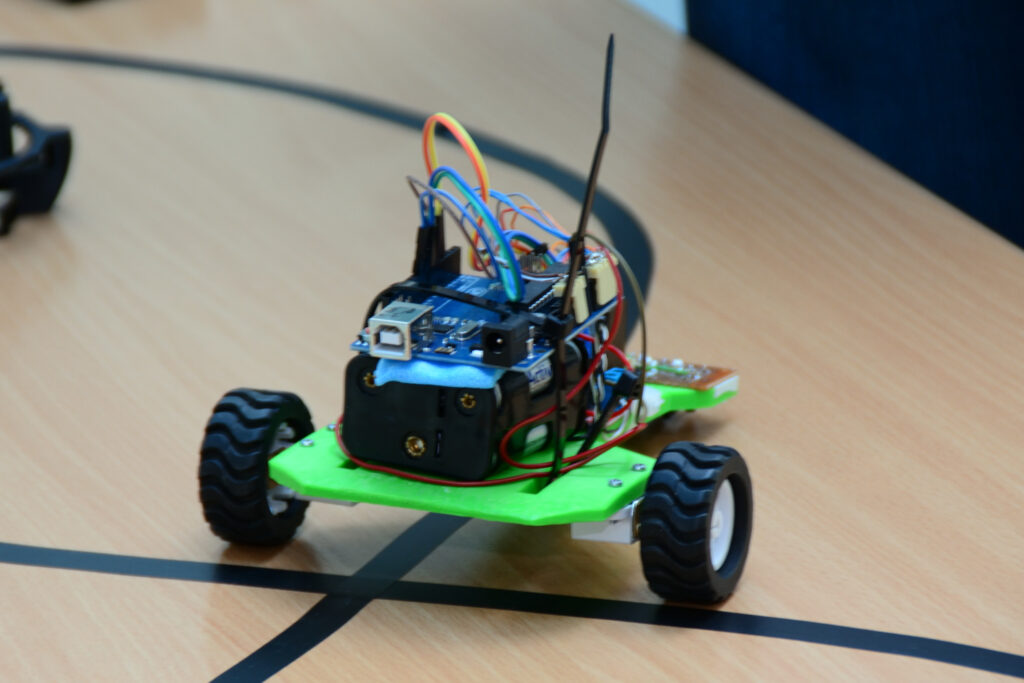
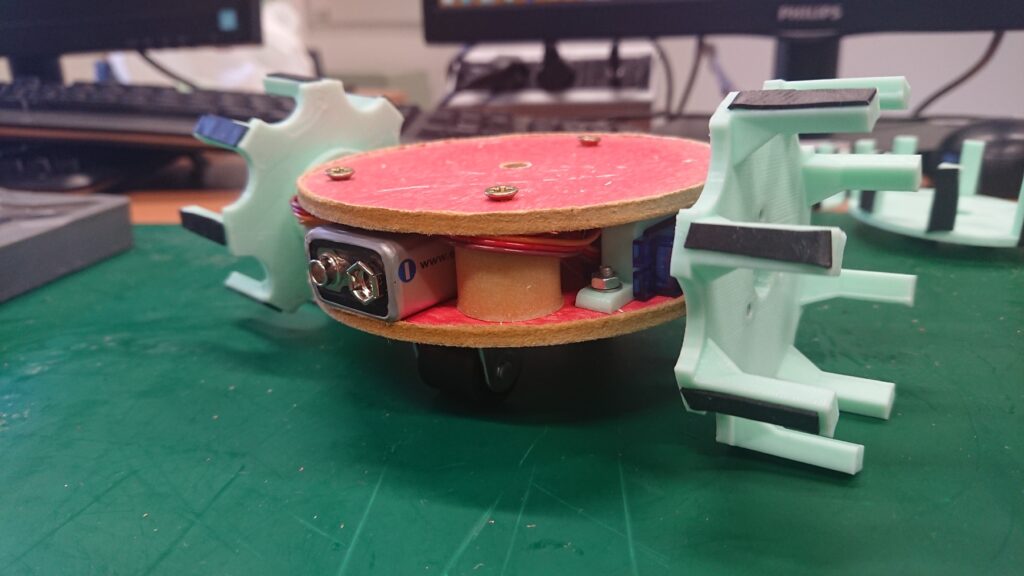
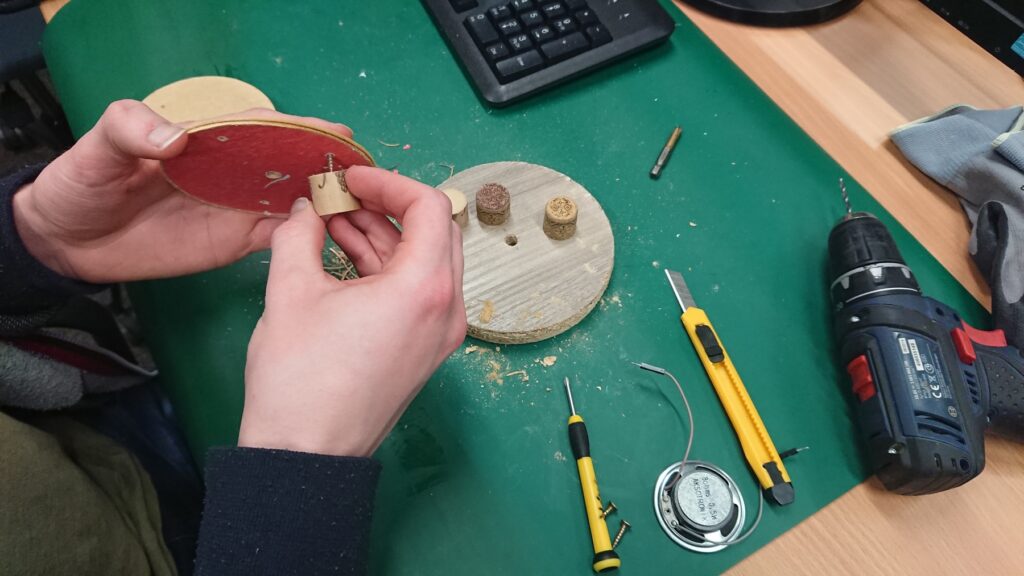
Tuning przeszła Maskotka, dostając czwarte koło (zapobieganie przewracaniu się przy nagłej zmianie kierunku ruchu), nie trzeba już kombinować z przeciwwagą 😉
Koło z przodu, dystans 3 mm z płyty pilśniowej (precyzyjnie wyciętej, co widać na zdjęciu).
No i ciągle rozmawiamy o wojnach robotów. Najważniejsze, że nowe koncepty zostały zaakceptowane i wydają się obiecujące. Czas pokaże, co z tego wyjdzie.
Prace koncepcyjne – jak mają wyglądać walczące roboty?
Pan Rafał przygotowuje drugi pojazd do pracy + coś tam programuje ze sterowaniem… Pewnie w następnym tygodniu zobaczymy efekty tej pracy. Porównamy też sklepowe koła z naszymi – wydrukowanymi w 3D.
Prędkość serw
Pan Tomasz wykorzystał swój układ mierzący liczbę obrotów na minutę do zbadania zależności zmiany tej prędkości od wypełnienia sygnału sterującego serwem. Serwem pracy ciągłej sterujemy podając sygnał PWM z wypełnieniem z przedziału 1000-2000 us (metoda writeMicroseconds() z klasy Servo), gdzie wartość 1500 us odpowiada zatrzymaniu serwa, a wartości 1500-2000 przekładają się na coraz szybsze obroty serwa w jedną stronę (1500-1000 us w przypadku obrotów w przeciwną stronę). Tyle teorii. A praktyka?
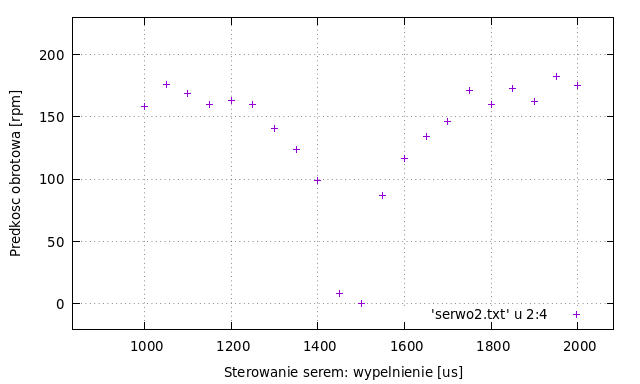
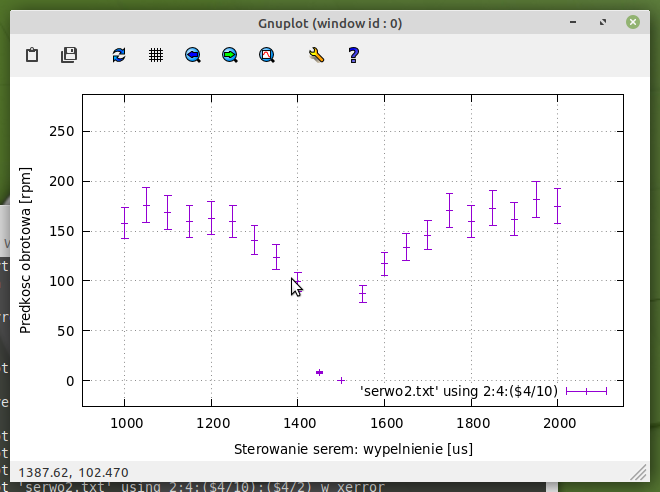
No właśnie – serwo serwu nie równe, a tanie serwa dlatego są właśnie tanie, bo nie trzymają się ściśle tym teoretycznym wymogom. Okazuje się, że pozycja STOP jest „gdzieś w okolicy” sygnału 1500. Obroty w prawo i w lewo też nie są równe – pomimo równego odejścia od pozycji STOP. Na poniższym wykresie widać, że odejście wypełnieniem PWM o 100 us skutkuje prędkością 117 rmp (wartość 1600 us) oraz 99 rpm (wartość 1400 us). Wykres nie jest idealnie symetryczny względem osi x=1500.
Wyniki pomiarów pierwszego przebiegu testu prękości. Pomiar trwa 1s a sygnał PWM zmienia wypełnienie co 50 us.
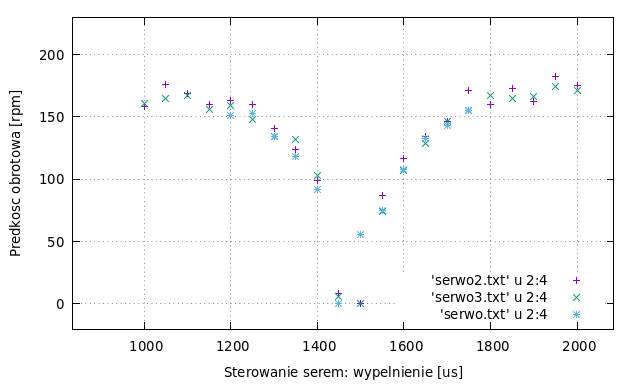
Oczywiście jeden pomiar to za mało, więc procedura została powtórzona dla kolejnych przebiegów, a wyniki zapisane w kolejnych plikach tekstowych. Wniosek – rezultaty są powtarzalne.
Kolejne pomiary tego samego serwa – wyniki są całkiem powtarzalne.
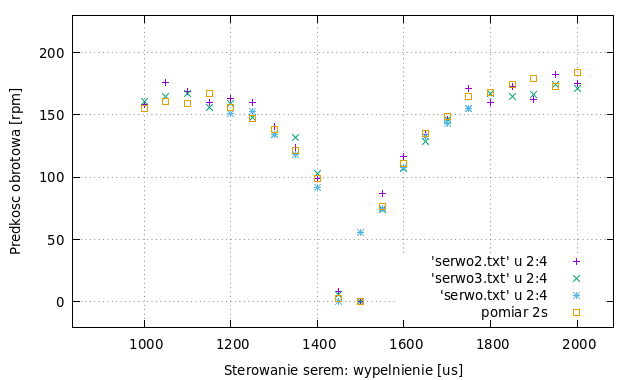
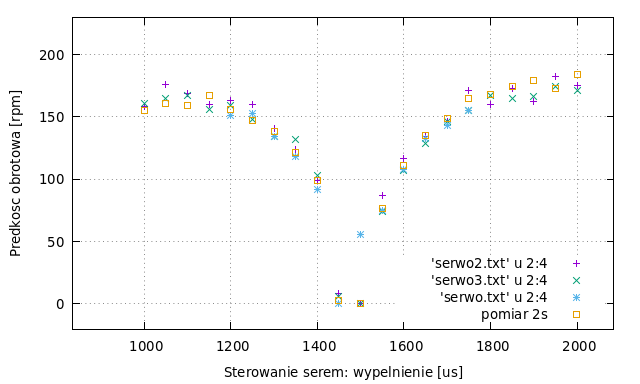
Mając więcej pomiarów, można policzyć odchylenie standardowe i dodać słupki błędów… ale nie przesadzajmy 😉 Dla pewności pomiarów jeden raz dwukrotnie zwiększyliśmy czas zliczania prędkości (czyli dla każdej wartości wypełnienia czekamy 2s i zliczamy impulsy) – wyniki są zgodne.
Poprzednie pomiary plus nowa seria – pomiar 2s dla każdego wypełnienia.
Wnioski: 1) prędkość nie rośnie liniowo ze zmianą wypełnienia sygnału sterującego, 2) STOP dla serwa jest „gdzieś” w okolicach 1500 us, ale drobna zmiana sygnału może już poruszyć serwo w jednym kierunku, podczas gdy ta sama wartość wypełnienia nie wystarczy by ruszyć serwo w przeciwnym kierunku, 3) prędkość nasyca się około ~200 us wartości skrajnych (1000-1200 us -> prawie jedna wartość prędkości, tak samo jak 1800-2000 us), 4) ruch w lewo i prawo nie jest symetryczny.
Dalsze prace: Można kontynuować sprawę testowania serw, poddając tym samym próbom inny egzemplarz tego samego serwa – aby przekonać się, czy widoczne tu zachowanie jest typowe dla każdego serwa, czy jednak trafiło się nam wyjątkowy egzemplarz a inne są inne.
gnuplot
Do stworzenia wykresów „na szybko” wykorzystałem program gnuplot – świetny w takich sytuacjach (wykresy na szybko, dane z numeryki, dane z Arduino). „Surowe” dane wypisywane w oknie Monitora porta szeregowego wyglądały następująco:
Wystarczy przekopiować te dane do pliku tekstowego (np. serwo.txt) a następnie uruchomić gnuplot i wydać polecenie wykresu danych z pliku:
plot 'serwo.txt’ using 2:4
Polecenie to każe wykorzystać plik 'serwo.txt’ oraz kolumnę 2 dla x-ów, kolumnę 4 dla wartości y-ków. Jak widać nie trzeba kopiować danych do arkusza kalkulacyjnego, usuwać niepotrzebne napisy (tutaj: „Servo:”, „Predkosc:”) czy też tworzyć wykres z zaznaczonych tam komórek. Wystarczy posłużyć się prostą komendą plot podając kolumny do wykorzystania (dyrektywa using).
gnuplot w akcji – druga widoczna komenda rysuje dwie krzywe (z dwóch plików) jednocześnie na jednym wykresie.
Gnuplot ma bardzo dużo możliwości – ale tutaj wspomnę tylko o słupkach błędów – gdyby były gdzieś w pliku, np. w siódmej kolumnie, to by wystarczyło wpisać następujące polecenie do ich wyświetlenia:
plot 'serwo2.txt’ using 2:4:7 with yerror
ale cóż – my nie mamy siódmej kolumny… zamiast tego niech wykreślone będą 10% błędy, czyli ponownie wykorzystamy czwartą kolumnę, dzieląc ją przez 10:
plot 'serwo2.txt’ using 2:4:($4/10) with yerror
gnuplot ze słupkami błędów na osi y (with yerror). Komenda plot 'serwo2.txt’ using 2:4:($4/10) with yerror
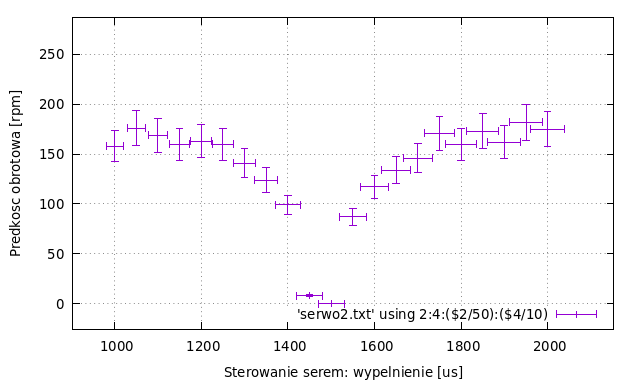
A może słupki na osi x i y? czemu nie!
plot 'serwo2.txt’ using 2:4:($2/50):($4/10) with xyerror
Prace podzieliły się na dwa tory – niezależnie powstaje sterowanie, niezależnie poznawane są możliwości kolorowych LED-ów WS2812B. Dzięki takiemu podziałowi projekt brnie do przodu, choć przyznać trzeba, że powstanie tylko jedno sterowanie – bez konkurencji, więc… oby było dobre 😉
BT master
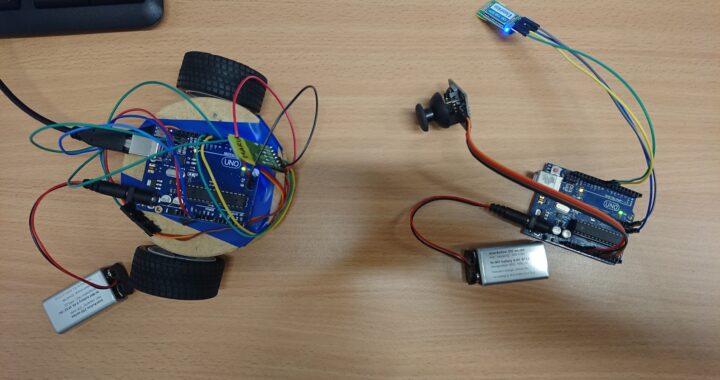
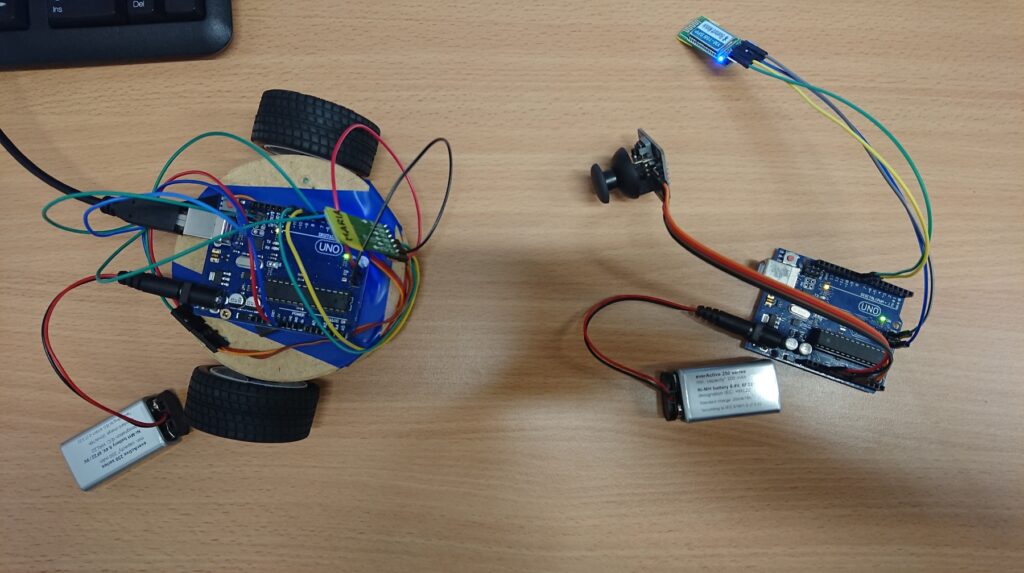
Pan Rafał postanowił wykorzystać dwa moduły Bluetooth (BT) aby komunikować się pomiędzy pojazdem a kontrolerem (bez czekania na wykorzystanie radiówek nRF24L – szkoda… ale do tego pewnie jeszcze wrócimy).
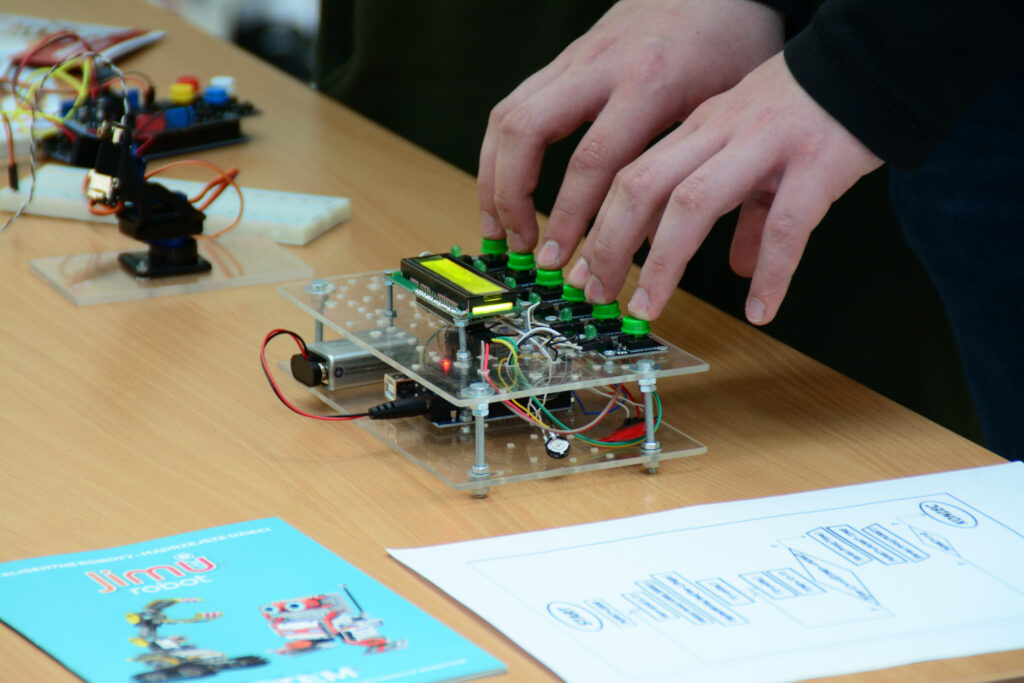
Pojazd (z lewej, moduł BT MASTER) oraz „kontroler” do sterowania (z prawej, BT SLAVE)
Dotychczas to telefon z aplikacją na Androida był MASTEREM (kontrolerem) łączącym się z pojazdem, czyli BT SLAV-em. Teraz jednak używamy dwóch BT w tym celu – choć przyznać trzeba, że prościej, efektywniej i taniej wydaje się zastosowanie wspomnianych na wstępie modułów nRF24L.
Kontroler ma podłączony moduł JOY-stica oraz moduł BT, który wysyła odczyty. Odbiorcą tych pakietów jest moduł BT w pojeżdzie, który łączy się z naszym kontrolerem. Aby to było możliwe należy MASTERA skonfigurować tak, aby po jego uruchomieniu „szukał” kontrolera i się z nim łączył. Realizuje się to przez tryb komend AT.
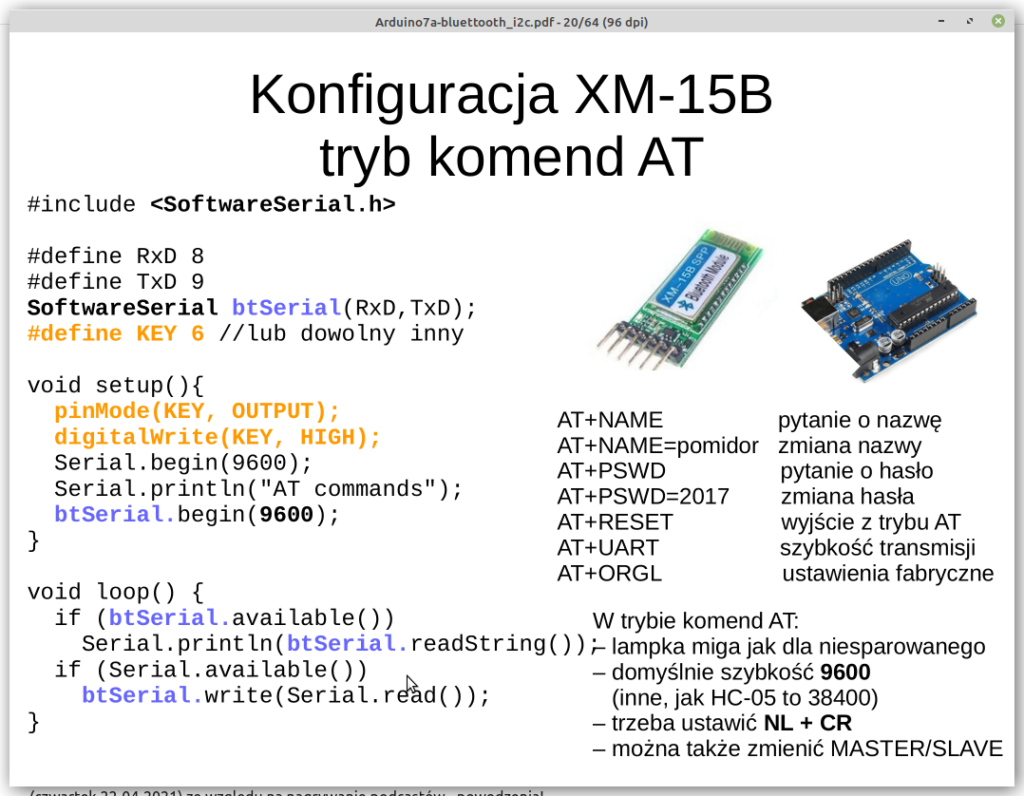
W tym celu podłączamy BT z dodatkowym pinem ustawionym na HIGH (poniżej pin #6 z Arduino, nazwany KEY, połączony z pinem STATUS w module XM-15B) i programikiem według poniższego schematu:
Wejście w tryb komend AT.
Jak widać program czyta bajty z portu szeregowego PC-ta i wysyła je do modułu BT podłączonego do Arduino (metody readString() oraz write()). Sprawdzamy, czy mamy wszystko poprawnie działające wywołując komendę AT+NAME. Powinna pojawić się nazwa naszego modułu (uwaga: nawet niepoprawnie wyświetlona) ORAZ nowa linia z napisem OK. Jeśli tak nie jest, trzeba sprawdzić podłączenia.
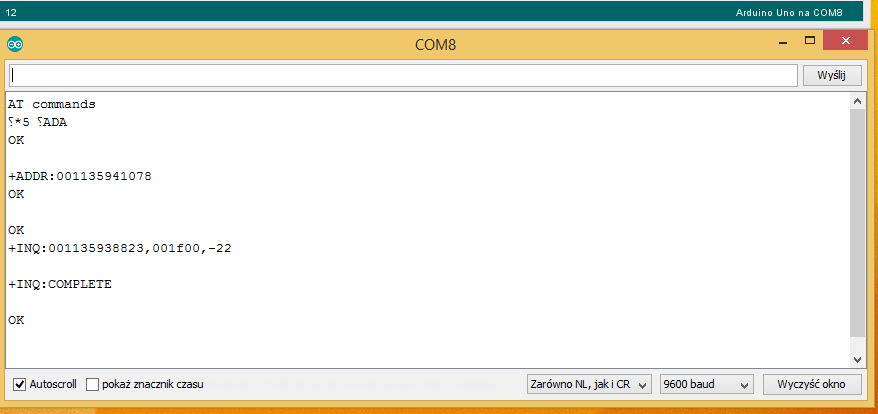
Moduł BT w trybie komend AT. Zwróć uwagę na znacznik końca linii: NL+CR.
Tryb komend AT umożliwia nam zmianę nazwy urządzenia BT, zmianę hasła czy innych parametrów komunikacji (np. szybkość transmisji szeregowej). Ale my wykorzystujemy go najpierw do odczytania numeru identyfikacyjnego urządzenia BT SLAVE – naszego kontrolera. Parowanie urządzeń BT odbywa się przez ten numer (a nie przez przyjazne nazwy, jak w Androidzie). Wydajeny komendę AT+ADDR i mamy odpowiedź: u nas 001135938823. Teraz wychodzimy z tryb AT dla kontrolera (BT SLAVE) i wgrywamy ten sam program na Arduino z BT MASTEREM.
Pojazd (BT MASTER) ma się łączyć z konkretnym modułem BT – znamy jego ID. Musimy więc najpierw ustawić go w tryb MASTER-a (komenda AT+ROLE zwróci 0 gdy moduł jest SLAVE-em, a 1 gdy MASTER-em; zmiana trybu odbywa się komendą AT+ROLE=1). Następnie zapisujemy adres kontrolera poleceniem AT+BIND=001135938823. Teraz można już wyłączyć program dla modułów BT pracujących w trybie AT i wgrać nasz własny programik na Arduino, które przez UART będzie odczytywać dane przesyłane przez kontroler modułami BT (oczywiście – jeśli włączymy pojazd, a kontroler nie będzie włączony – nie nastąpi komunikacja i pojazd nie będzie otrzymywać instrukcji sterująych).
Kto ma być MASTER, kto ma być SLAVE?
Pan Rafał zdecydował, że kontroler będzie SLAVE, a pojazd MASTEREM. Czy to dobrze? Można było by zrobić na odwrót… I takie właśnie rozwiązanie jest chyba lepsze, bo pojazd jako SLAVE czeka na dane wysyłane przez… dowolne sparowane urządznie! Może to być dedykowany kontroler (który właśnie tu powstaje) ale także jakaś apka na Androidzie – wówczas telefon jako MASTER może sterować naszym pojazdem. Takie rozwiązanie jest bardziej uniwersalne, więc pewnie w przyszłości będzie zastosowane.
Można też zajrzeć do opisu łączenia modułów BT master <-> slave na tej stronie – polecam.
WS2812B
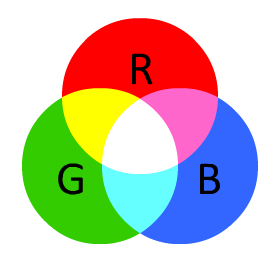
Pan Tomasz postawił sobie zadanie płynnego przejścia kolorów: od niebieskiego do czerwonego w module WS2812B. Te dwa kolory mają być odpowiedzialne za wartości odczytanego pola magnetyczna magnesu. Zapis kolorów w systemie RGB nie jest tutaj najwygoniejszy, więc wybór padł na zastosowanie modelu HSV.
Model kolorów RGB. Przejście od czerwieni do niebieskiego to jednoczesna zmiana dwóch amplitud kolorów: R i B.
Model kolorów HSV. Droga od czerwieni do niebieskiego to zmiana jednego parametru – „kąta”, czyli wartości H.
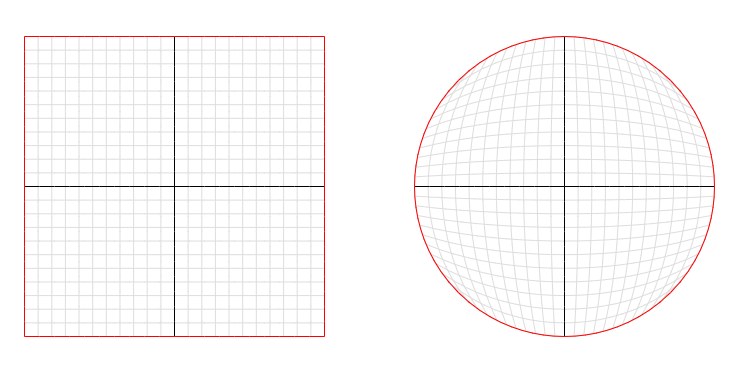
Sam PID nie wystarczył. Moduł JOY-sticka ma mechaniczną „wadę”, że wychyla się góra/dół (lewo/prawo) mniej niż „pod kątem”. Maksymalne odczyty (1023 w przypadku Arduino UNO) otrzymuje się przy skrajnym wychyleniu w górę/prawo (dół/lewo) ale wychylając joy „po skosie” mamy (teoretycznie) o pierwiastek z dwóch więcej! Dlatego też to właśnie wychylenia „pod kątem” mają wartości 1023 a skrajne pionowe/poziome uzyskują te wartości jeszcze przed swoim maksymalnym wychyleniem – dalsze wychylanie nic już nie daje (mamy ciągle 1023 – zakres ruchu joya „zmarnowany”). Aby to zniwelować Pan Bartek znalazł ciekawe mapowanie kwadratu na kółko:
Odwzorowanie kwadratu na okrąg (kliknij obrazek aby przejść do źródła).
Taka modyfikacja sterowania pozytywnie wpłynęła na kontrolowanie Maskotki. Gratulacje!
Kolejne spotkanie: czwartek 6 maj 2021, godz. 15:15.
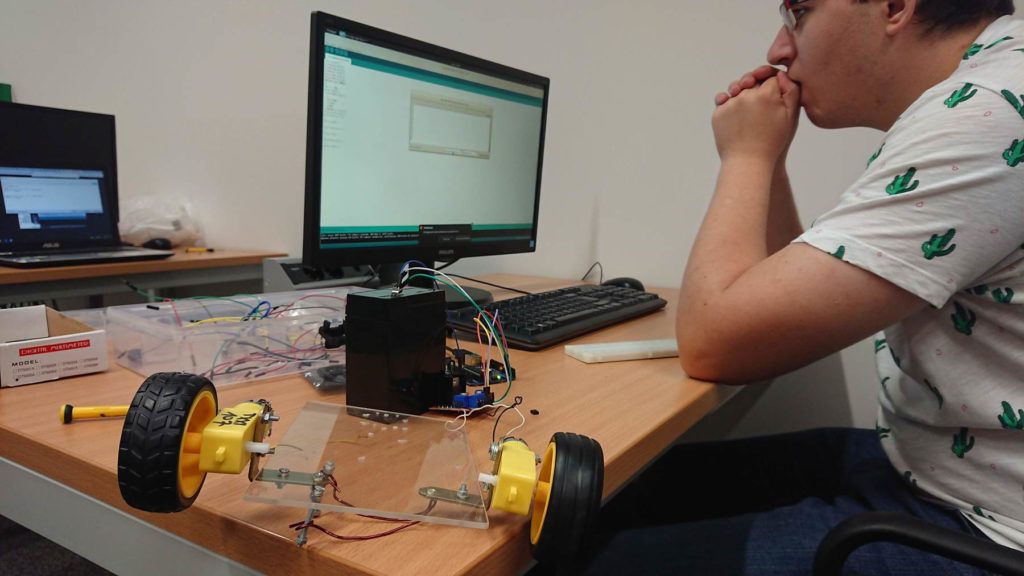
Pan Rafał oprogramowywał sterowanie swojej „kanapki” z wykorzystaniem modułu BT. Nie jest to może najlepsze rozwiązanie sterowania, ale szybkie i bezproblemowe (jasne, jasne – czytaj dalej). Proste, po włączamy dwie standardowe biblioteki Servo.h oraz SoftwareSerial.h i piszemy prosty kod.
A tu klops! Ilekroć przesyłane są dane przez moduł BT, to serwa „wariują”, zachowują się zupełnie nieoczekiwanie. Można to sprawdzić powyższym kodem gdzie przesyłamy 'W’ przez Bluetooth i silnik kręci się na maksa do przodu, a następnie wysyłamy z apki kolejne, nic nie znaczące znaczki (wciskamy inne, zdefiniowane przyciski, np. 'A’, 'D’ itd). Te komendy powinny zostać zignorowane (brak odpowiednich instrukcji w switch-u), a serwo powinno utrzymywać swój dotychczasowy ruch. Tak się jednak nie dzieje…
Jak zawsze najpierw należało sprawdzić przewody połączeniowe, ale to nie one okazały się przyczyną problemów. Grzebanie w internecie okazało się sukcesem – biblioteka SoftwareSerial.h korzysta z tego samego układu czasowego (timera) w Artudino co biblioteka Servo.h, do sterowania PWM. Chodzi o to, ze Arduino (a dokładniej ATmega 328P) posiada trzy niezależne timery: dwa 8-bitowe oraz jeden 16-to bitowy. Właśnie z tego ostatniego korzystają dwie wspomniane biblioteki i powstaje konflikt!
Rozwiązaniem może być alternatywna biblioteka do obsłui serw: ServoTimer2. Już sama nazwa wskazuje, że korzysta ona z drugiego timera – nie powinno być więc konfliktu z SoftwareSerial.h. Lekko zamieniamy kod programiku i sprawdzamy zachowanie serw podczas przesyłania danych z BT. Klops: jednak nie pomogło.
Jeśli nie biblioteka serw, to szukamy zamiennika do drugiej biblioteki – komunikacji szeregowej. Tutaj trafiamy na AltSoftSerial i nasze nadzieje nie gasną 😉 Ponownie modyfikujemy kod (uwaga: pinami do komunikacji są „na sztywno” pin 9 oraz 10 – nie ma możliwości wyboru, jak w przypadku biblioteki SoftwareSerial.h).
Nie poddajemy się i stosujemy dwa zamienniki bibliotek jednocześnie – bum! mamy to! działa!
#include <ServoTimer2.h>
#include <AltSoftSerial.h>
AltSoftSerial bt;//Arduino UNO -> RxD=9, TxD=10, nie ma wyboru!
ServoTimer2 silnik;
void setup() {
Serial.begin(9600);
bt.begin(9600);
silnik.attach(3);
Serial.println("start!");
}
void loop() {
if (bt.available()){
char komenda=bt.readString());
Serial.print("odebrano= ");
Serial.println(komenda);//dla sprawdzenia
switch (komenda){
case 'W': silnik.write(1000); break; //przod
case 'S': silnik.write(2000); break; //tyl
case 'X': silnik.write(1500); break; //stop
}//switch
}
Niewielkie zmiany, ale istotne. Warto zwrócić uwagę, że funkcja write() dla obiekty ServoTimer2 zapisuje mikrosekundy wypełnienia, czyli dokładnie to co robi funkcja writeMicroseconds() z obiekty Servo (biblioteka Servo.h), co jest trochę mylące. Wystarczy mieć to na uwadze i będzie OK.
Jeszcze jedno: wspomniany problem nie występuje na starszych wersjach środowiska i bibliotek Arduino IDE. Warto sprawdzić.
Wojny robotów: trzecia „kanapka” i korki (przymyślenia).
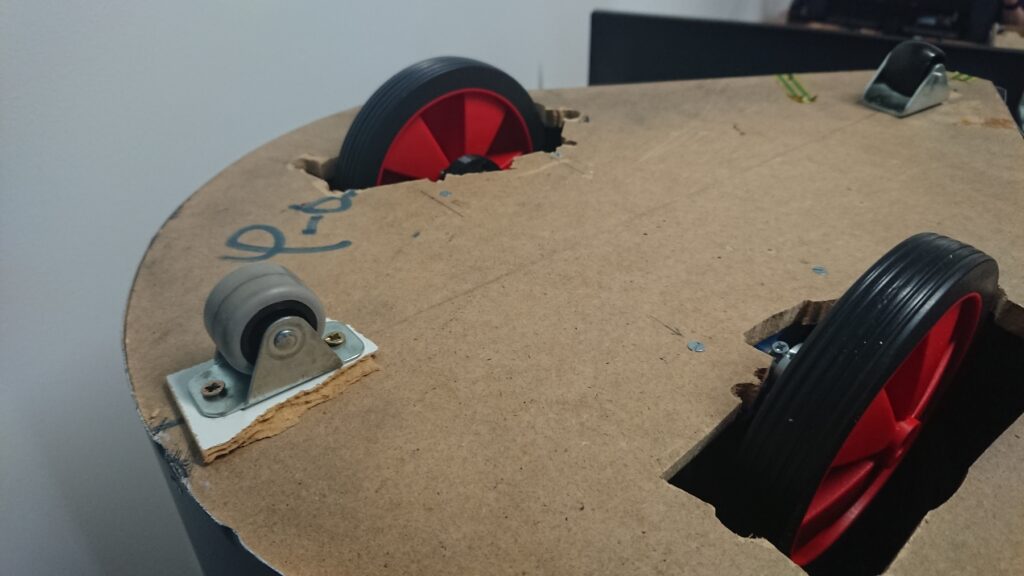
Pan Kacper buduje trzeci pojazd „kanapka”. Mamy nowe, trochę zmodyfikowane tymczasowe koła – choć drukarka 3D pracuje powoli, to i tak trzeba się natrudzić przy składaniu całej konstrukcji (jakieś 3h?).
Trzeci pojazd. Nowe koła. Ba(k)teria na ścisk!
Myślałem, że wykorzystanie korków od wina jest oryginalne – a tu się okazało, że takie zabiegi były znane i (zapewne) stosowane przynajmniej od roku 1200+. Źródła historyczne donoszą, że prawdziwy podróżnik awanturnik na szlaku musiał posiadać zestaw korków – pewnie w celach majsterkowania, bo po cóż innego miał on je w swoim ekwipunku?
Ekwipunek Geralta: korki to podstawa! Witcher 3, CDPR
Wojny robotów: szybkość obrotowa (RPM) silczka
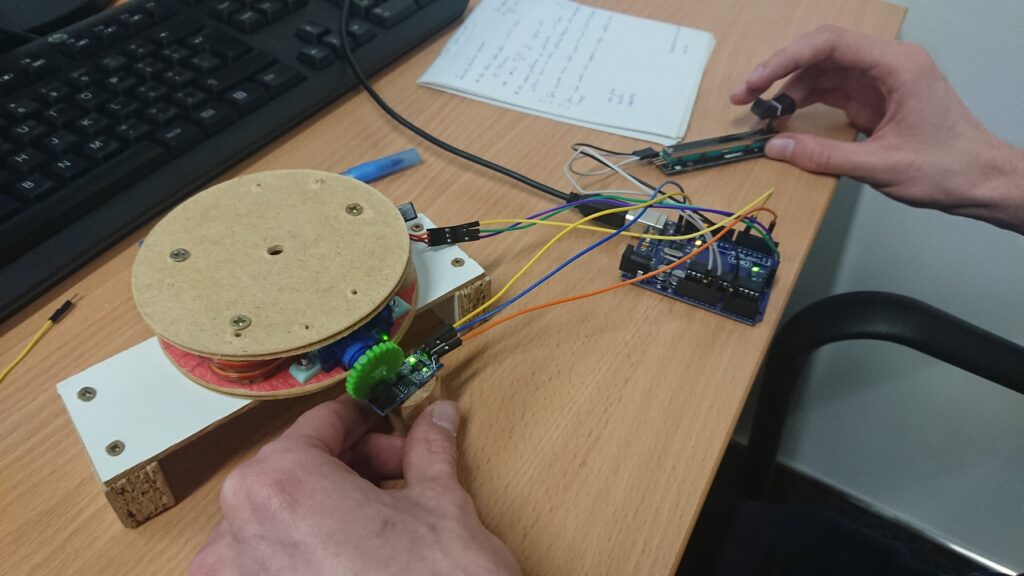
Pan Tomasz z kolei zawziął się na zbadaniu prędkości obrotej kół (RPM = Revolutions Per Minute). Prosty układ pomiarowy (tymczasowy) pozwolił mu zmierzyć tą prędkość. Układ składa się z potencjometru do sterowania prędkością serwa Feetech FT90R (z prawej strony), oraz czujki szczelinowej (umieszczonej na – oczywiście – korku do wina) wraz z przymocowanym kołem zębatym (druk 3D).
Pomiar prędkości obrotowej serwa.
Pan Tomasz wykorzystał przerwania z Arduino UNO (a dokładniej jedno, ze zboczem narastającym). cdn…
Maskotka
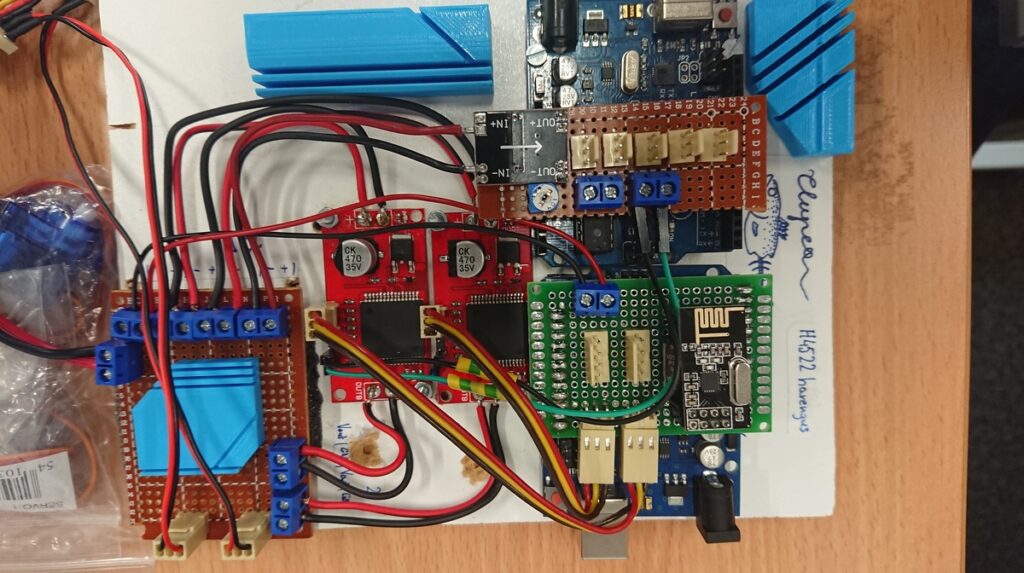
BB zakończył prace nad płytą główną do Maskotki – aktualnie przygotowywane jest lepsze sterowanie prędkością kół – kontroler PID.
Rusza Uniwersyteckie Centrum Podcastów „Na końcu świata” – nowa inicjatywa na naszym Uniwersytecie. Dostaliśmy propozycję prowadzenia takiej cyklicznej audycji. Tematyka w naszych rękach, ale z racji specjalności Fizyka gier komputerowych i robotów same narzucają się gry komputerowe, sprzęt komputerowy, sprzęt do programowania elektroniki oraz nowinki robotyczne/IT. Myślę, że w zależności od poruszanej kwestii może to być audycja 30-to minutowa (dłuższa temat do omówienia) ale także krótsza (15 min na „nowinki”). W kilka osób będzie łatwiej prowadzić takie audycje, więc zachęcam do zastanowienia się i zgłoszenia po Świętach.
Wojny robotów: „kanapka”.
Ulepszamy nasze konstrukcje, montujemy lepsze mocowania silniczków. Sporo pracy manualnej… ale projekt idzie do przodu!
W pracach nad drugą konstrukcją wykorzystaliśmy korek od wina – jest wytrzymały, świetnie się modeluje (przycina, docina) a także łączy i dzieli! Brawo Pan RŁ!
Prace trwają… ale już koniec tego etapu!
Maskotka
BB pracuje nad płytą główną do Maskotki – jest już moduł uporządkowujący przewody + integrujący moduł nRF24L. Fajnie!
Budujemy drugie podwozie (ciągle w wersji v0.1) – chodzi o to, aby na Święta mieć dwa, a może nawet trzy egzemplarze pojazdów rozdysponowane po zainteresowanych Studentach. To powinno przyspieszyć pracę nad projektem 😉
W pracach nad drugą konstrukcją wykorzystaliśmy korek od wina – jest wytrzymały, świetnie się modeluje (przycina, docina) a także łączy i dzieli! Brawo Pan RŁ!
Drugie podwozie i niezastąpiony materiał „konstruktora amatora” – korek od wina 😉
Pan Tomasz w międzyczasie przypomniał sobie komunikację Bluetooth i wykorzystał nową apkę ze sklepu Androida – Arduino RC. Zaletą jest prostota i wystarczająca funkcjonalność!
Pan Przemek zapoznał się z sygnałami PWM (obowiązkowy programik „gaszący” LEDa – i funkcja analogWrite) a następnie poznał sterowanie silnikami DC – za pomocą sterownika L293N. Najpierw podłączaliśmy zasilanie 6V z żelowego akumulatorka:a następnie konstrukcja uległa modyfikacji (w tym także zasilanie) i powstała taka oto platforma testowa:
Udało się „nauczyć” jeździć ten pojazd do przodu, tyłu i skręcać. Na razie wykonuje on wszystkie te czynności w kółko – więc jest to mało sensowne. Ale kolejny krok to zdalne sterowanie i ten krok to już duży krok w kierunku Wojny Robotów 😉
Precyzyjna Maszyna (PM2D3D) – krańcówka
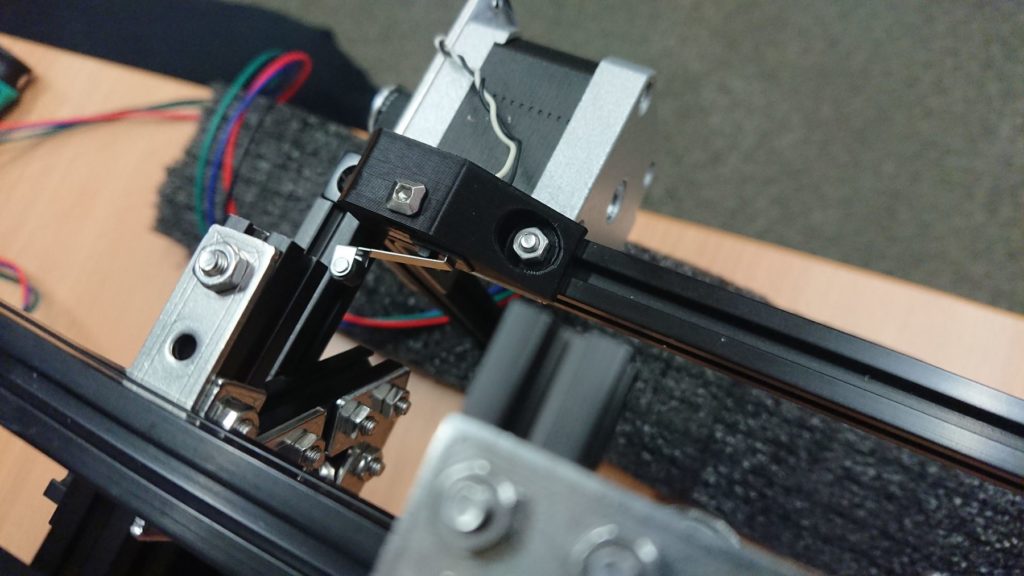
Pan Bartek zamontował krańcówki – wydrukował odpowiednie elementy trzymające.
Skoro są już krańcówki, to należy je oprogramować. Drogi są (co najmniej) dwie: 1) w programie realizującym poruszanie silnikami sprawdzamy, co się dzieje z krańcówkami – i w razie czego zatrzymujemy konkretny silnik, lub 2) inicjalizujemy przerwania, które robią to automatycznie. Jednak zanim doszło do tego to… pojawiły się problemy z rysowaniem linii po skosie. Przygotowany przez Pana Bartka kod miał działać – jednak okazało się, że ma wady. Wiadomo – ten się nie myli, kto nic nie robi 😉 Dlatego dzisiejsze zajęcia poszły w kierunku naprawy softwaru… Jeszcze jest trochę roboty 😉
Więcej o projekcie Maszyny na stronie projektu.
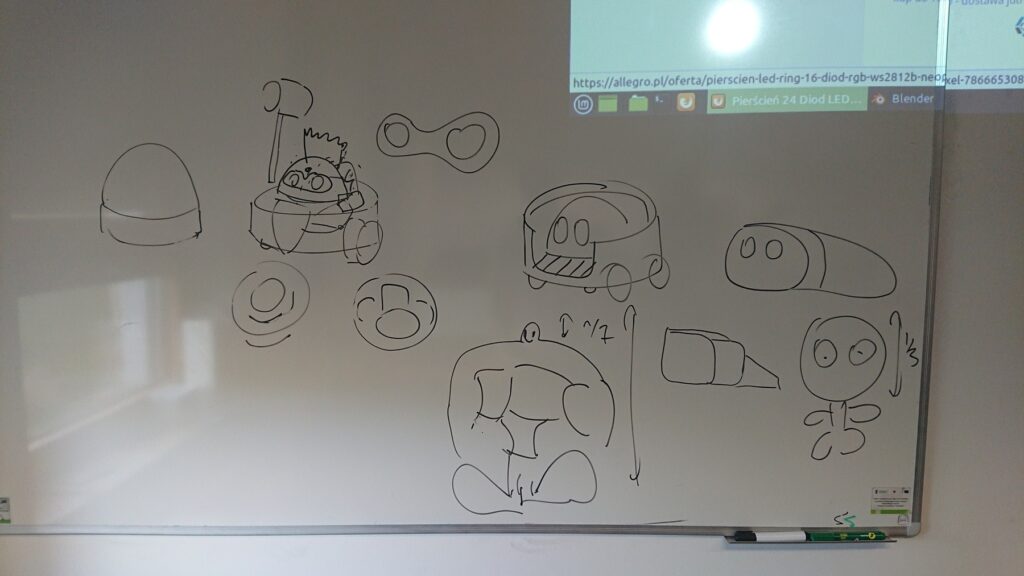
Mamy nowy pomysł: WOJNY ROBOTÓW ! Będzie trochę zabawy z prostym sterowaniem pojazdami trójkołowymi, połączonymi z elementami rywalizacji. Będzie też zabawa w modelowanie 3D i wydruk gotowych „pojazdów”. Szkice z „burzy mózgów”:
Właśnie z powodu nowego pomyłu przetestowaliśmy działanie czujki pola magnetycznego SS49E – dziecinnie proste 😉 Podłączamy do zasilania (5V z Arduino UNO) a wyjście #3 do portu analogowego.
Odczytywane napięcie z portu analogowego tłumaczymy na wartość pola magnetycznego zgodnie z poniższym rysunkiem (z noty katalogowej czujnika).
Zaletą tego konretnego czujnika (SS49E) jest możliwość odczytywania pola z obu biegunów magnesu – czyli z biegunu półnonego i południowego. Są bowiem inne czujki, które informują nas jedynie o wartości pola z jednego bieguna, a na pole z przeciwnego bieguna są „głuche”.
Nas nie interesują wartości w mT, a raczej sama informacja zbliżenia do magnesu. No właśnie – przetesowaliśmy kilka małych (i większych) magnesów, w tym neodymowe – bardzo silne. Będzie się działo!
Chcę podziękować wszystkim studentom za aktywne uczestnictwo w imprezie pokazowej. Szczególne podziękowania kieruję do członków koła naukowego Fi-BOT.
(c) K.G.
Studenci Wydziału Fizyki biorący udział w pokazach. Wśród nich uczestnicy koła naukowego Fi-BOT (nie wszyscy – kto się spóźnił na zbiorowe zdjęcie – tego strata).Projekt BB: line follower.Tu powoli rodzi się pomysł „wojen robotów”… Pani Karolina „atakuje” Maskotkę (projekt Fi-BOT).„Nieśmiertelna” gra REFLEX. Projekt Fi-BOT.
Oficjalna relacja z Podlaskiego festiwalu – w kronice Wydziału Fizyki.









 a następnie konstrukcja uległa modyfikacji (w tym także zasilanie) i powstała taka oto platforma testowa:
a następnie konstrukcja uległa modyfikacji (w tym także zasilanie) i powstała taka oto platforma testowa: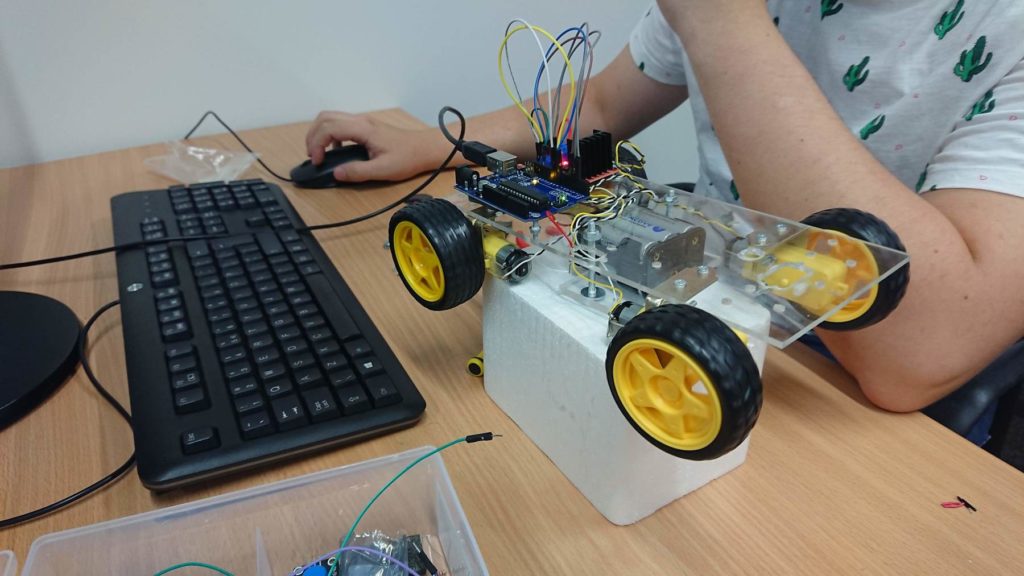 Udało się „nauczyć” jeździć ten pojazd do przodu, tyłu i skręcać. Na razie wykonuje on wszystkie te czynności w kółko – więc jest to mało sensowne. Ale kolejny krok to zdalne sterowanie i ten krok to już duży krok w kierunku
Udało się „nauczyć” jeździć ten pojazd do przodu, tyłu i skręcać. Na razie wykonuje on wszystkie te czynności w kółko – więc jest to mało sensowne. Ale kolejny krok to zdalne sterowanie i ten krok to już duży krok w kierunku 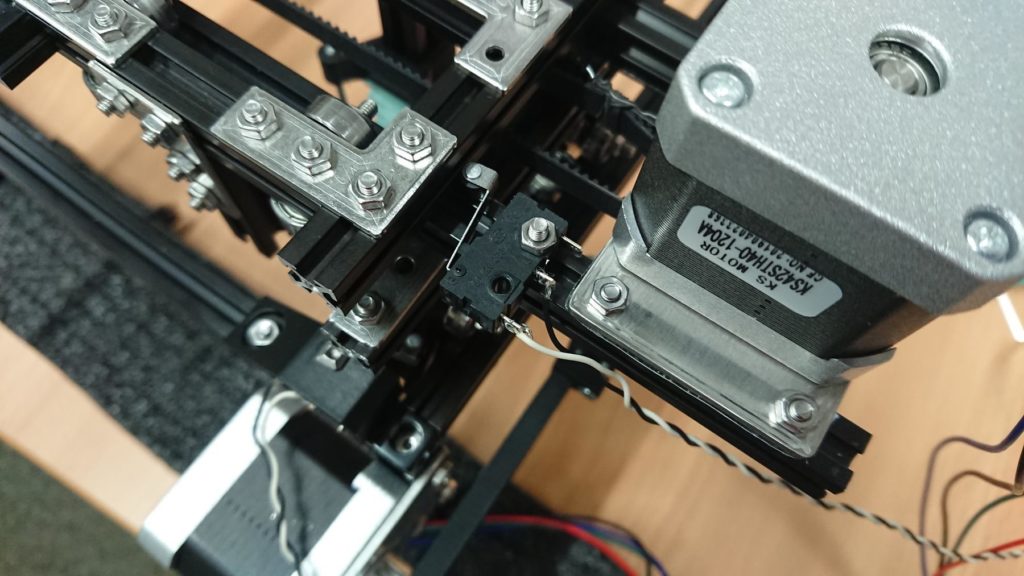
 Skoro są już krańcówki, to należy je oprogramować. Drogi są (co najmniej) dwie: 1) w programie realizującym poruszanie silnikami sprawdzamy, co się dzieje z krańcówkami – i w razie czego zatrzymujemy konkretny silnik, lub 2) inicjalizujemy przerwania, które robią to automatycznie. Jednak zanim doszło do tego to… pojawiły się problemy z rysowaniem linii po skosie. Przygotowany przez Pana Bartka kod miał działać – jednak okazało się, że ma wady. Wiadomo – ten się nie myli, kto nic nie robi 😉 Dlatego dzisiejsze zajęcia poszły w kierunku naprawy softwaru… Jeszcze jest trochę roboty 😉
Więcej o projekcie Maszyny na
Skoro są już krańcówki, to należy je oprogramować. Drogi są (co najmniej) dwie: 1) w programie realizującym poruszanie silnikami sprawdzamy, co się dzieje z krańcówkami – i w razie czego zatrzymujemy konkretny silnik, lub 2) inicjalizujemy przerwania, które robią to automatycznie. Jednak zanim doszło do tego to… pojawiły się problemy z rysowaniem linii po skosie. Przygotowany przez Pana Bartka kod miał działać – jednak okazało się, że ma wady. Wiadomo – ten się nie myli, kto nic nie robi 😉 Dlatego dzisiejsze zajęcia poszły w kierunku naprawy softwaru… Jeszcze jest trochę roboty 😉
Więcej o projekcie Maszyny na  Właśnie z powodu nowego pomyłu przetestowaliśmy działanie czujki pola magnetycznego SS49E – dziecinnie proste 😉 Podłączamy do zasilania (5V z Arduino UNO) a wyjście #3 do portu analogowego.
Właśnie z powodu nowego pomyłu przetestowaliśmy działanie czujki pola magnetycznego SS49E – dziecinnie proste 😉 Podłączamy do zasilania (5V z Arduino UNO) a wyjście #3 do portu analogowego.
 Odczytywane napięcie z portu analogowego tłumaczymy na wartość pola magnetycznego zgodnie z poniższym rysunkiem (z
Odczytywane napięcie z portu analogowego tłumaczymy na wartość pola magnetycznego zgodnie z poniższym rysunkiem (z  Zaletą tego konretnego czujnika (SS49E) jest możliwość odczytywania pola z obu biegunów magnesu – czyli z biegunu półnonego i południowego. Są bowiem inne czujki, które informują nas jedynie o wartości pola z jednego bieguna, a na pole z przeciwnego bieguna są „głuche”.
Nas nie interesują wartości w mT, a raczej sama informacja zbliżenia do magnesu. No właśnie – przetesowaliśmy kilka małych (i większych) magnesów, w tym neodymowe – bardzo silne. Będzie się działo!
Zaletą tego konretnego czujnika (SS49E) jest możliwość odczytywania pola z obu biegunów magnesu – czyli z biegunu półnonego i południowego. Są bowiem inne czujki, które informują nas jedynie o wartości pola z jednego bieguna, a na pole z przeciwnego bieguna są „głuche”.
Nas nie interesują wartości w mT, a raczej sama informacja zbliżenia do magnesu. No właśnie – przetesowaliśmy kilka małych (i większych) magnesów, w tym neodymowe – bardzo silne. Będzie się działo!