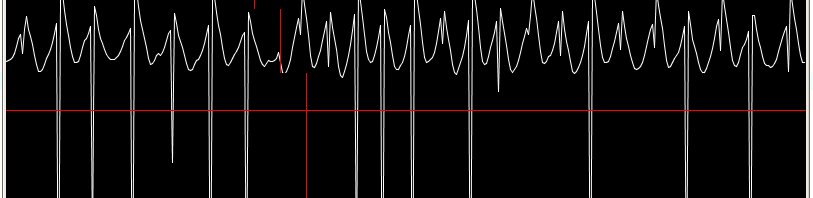
Panu Kamilowi udało się zbudować układ, który w podłączeniu z processingiem produkuje takie obrazki: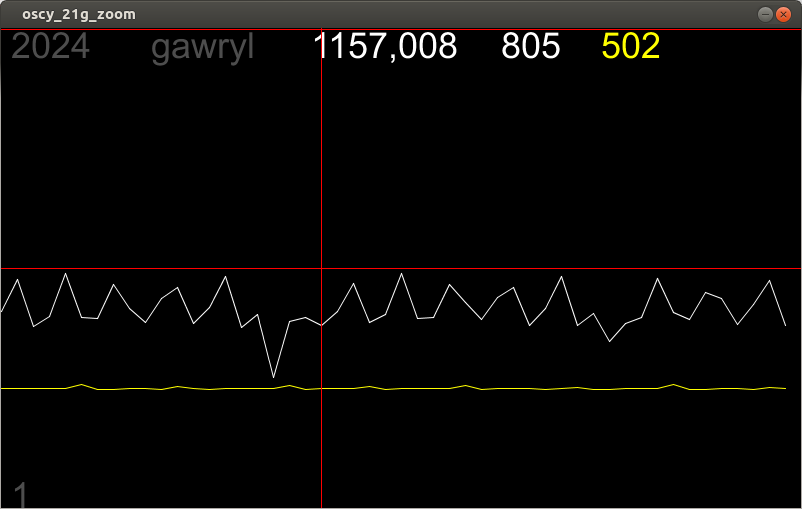
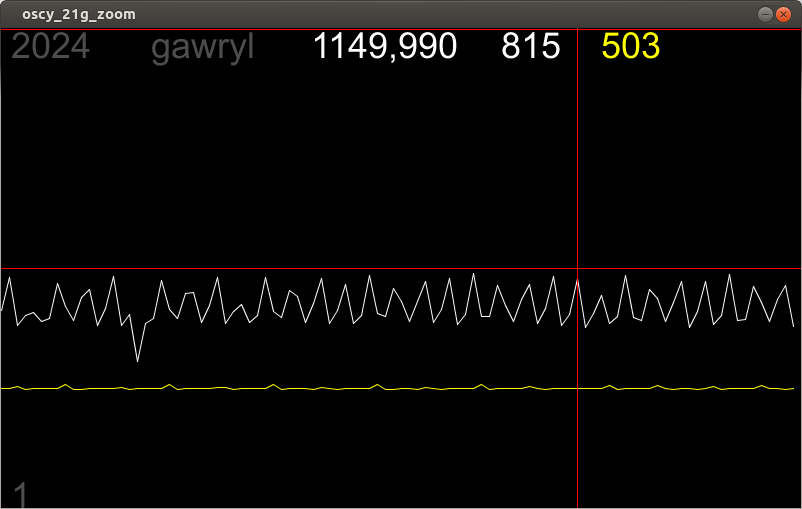
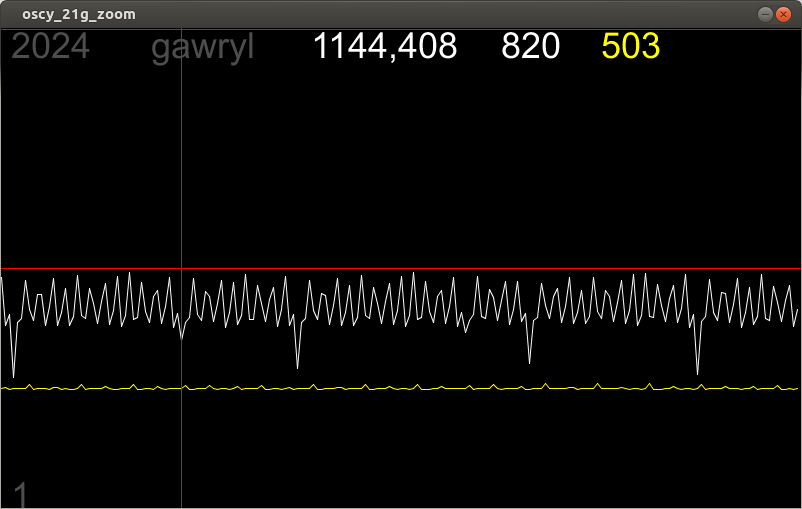
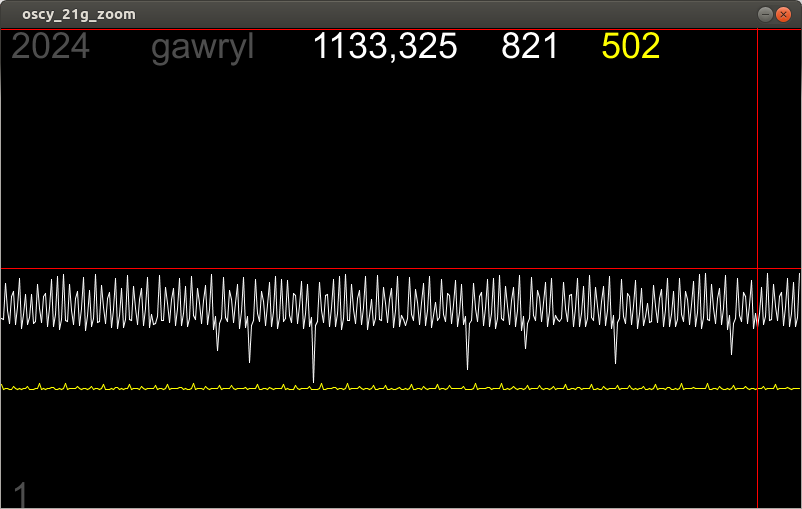
Widzimy tu dwie krzywe, ale to właśnie ta biała pochodzi z omawianego encodera. Teraz „trzeba tylko” opracować algorytmiczną metodę zliczania pików w danym okresie czasowym, a następnie przełożyć to na faktyczne obroty koła… Prace w toku…
Przy okazji: ta żółta krzywa pochodzi od czujki pola magnetycznego – dzięki niej w późniejszym czasie można będzie przełożyć zliczone piki (białe) na faktycznie wykonane obroty (żółte dwa piki odpowiadają jednemu pełnemu obrotowi).
Plik z przykładowymi danymi – do wstepnej obróbki (gnuplot, arkusz kalkulacyjny Calc…).