LCD 16×2 (na sterowniku HD44780)
 Właściwie niezbędny element, jeśli chcemy stworzyć mobilnego robota na płytce Arduino. W końcu zależy nam, aby „odczepić” się od komputera i portu szeregowego, ALE ciągle chcemy, aby Arduino do nas gadało 😉 Może to być stacja pogody, wyświetlająca na ekraniku aktualną temperaturę/ wilgotność/ prędkość wiatru/ cokolwiek (i nie musimy mieć podłączonego kompa!)…. może to być też pojazd na kółkach, którym sterujemy pilotem od TV – poznanym na naszym poprzednim spotkaniu. Wystarczy teraz połączyć wszystko do kupy (wraz ze sterownikiem silników – modułem L298D) i mamy zabawę! Warto wspomnieć, że sterownik ekraniku HD44780 obsługiwany jest przez bibliotekę LiquidCrystal — powinna być domyślnie zainstalowana w Arduino IDE.
Właściwie niezbędny element, jeśli chcemy stworzyć mobilnego robota na płytce Arduino. W końcu zależy nam, aby „odczepić” się od komputera i portu szeregowego, ALE ciągle chcemy, aby Arduino do nas gadało 😉 Może to być stacja pogody, wyświetlająca na ekraniku aktualną temperaturę/ wilgotność/ prędkość wiatru/ cokolwiek (i nie musimy mieć podłączonego kompa!)…. może to być też pojazd na kółkach, którym sterujemy pilotem od TV – poznanym na naszym poprzednim spotkaniu. Wystarczy teraz połączyć wszystko do kupy (wraz ze sterownikiem silników – modułem L298D) i mamy zabawę! Warto wspomnieć, że sterownik ekraniku HD44780 obsługiwany jest przez bibliotekę LiquidCrystal — powinna być domyślnie zainstalowana w Arduino IDE.
Poznany sposób podłączenia tego wyświetlacza angażował aż 6 pinów cyfrowych z Arduino – to dość dużo. Mogę dopowiedzieć, że istnieją inne sposoby obsługi tego wyświetlacza – przez protokół I2C – wymagające tylko 2 przewody… Wymagany do tego jest konwerter (za kwotę ~8.5zł, co jest dość sporo przy cenie samego wyświetlacza za ~10zł). Ale to opowieść na inną okazję.
millis()
Przekonaliśmy się także o tym, że funkcja millis() – zwracająca liczbę milisekund od czasu uruchomienia Arduino – jest bardzo użyteczna. Warte zapamiętania jest także dyskusja typów danych do przechowywania wartości milisekund – przy odpowiednim doborze mamy zmienną całkowitą, bez znaku i to 4-ro bajtową, gotową do zapisywania czasu 40-tu iluś tam dni w milisekundach właśnie. Chodzi oczywiście o typ unsigned long.
Liczba pi (3.141592…)
Na naszych zajęciach dużo się dzieje… Aby trenować wyświetlanie na ekraniku wyliczyliśmy liczbę pi ze wzoru Leibniza:

I choć kod liczący tego typu wyrażenia okazał się prosty, to jednak jego zrozumienie już takie oczywiste nie było. Wypada pochwalić jednego uczestnika – Mariusza z 2LO Bstok, który napisał własny algorytm poprawnie liczący tą liczbę, cechujący się lepszą wydajnością niż mój szkoleniowy. Gratuluję!
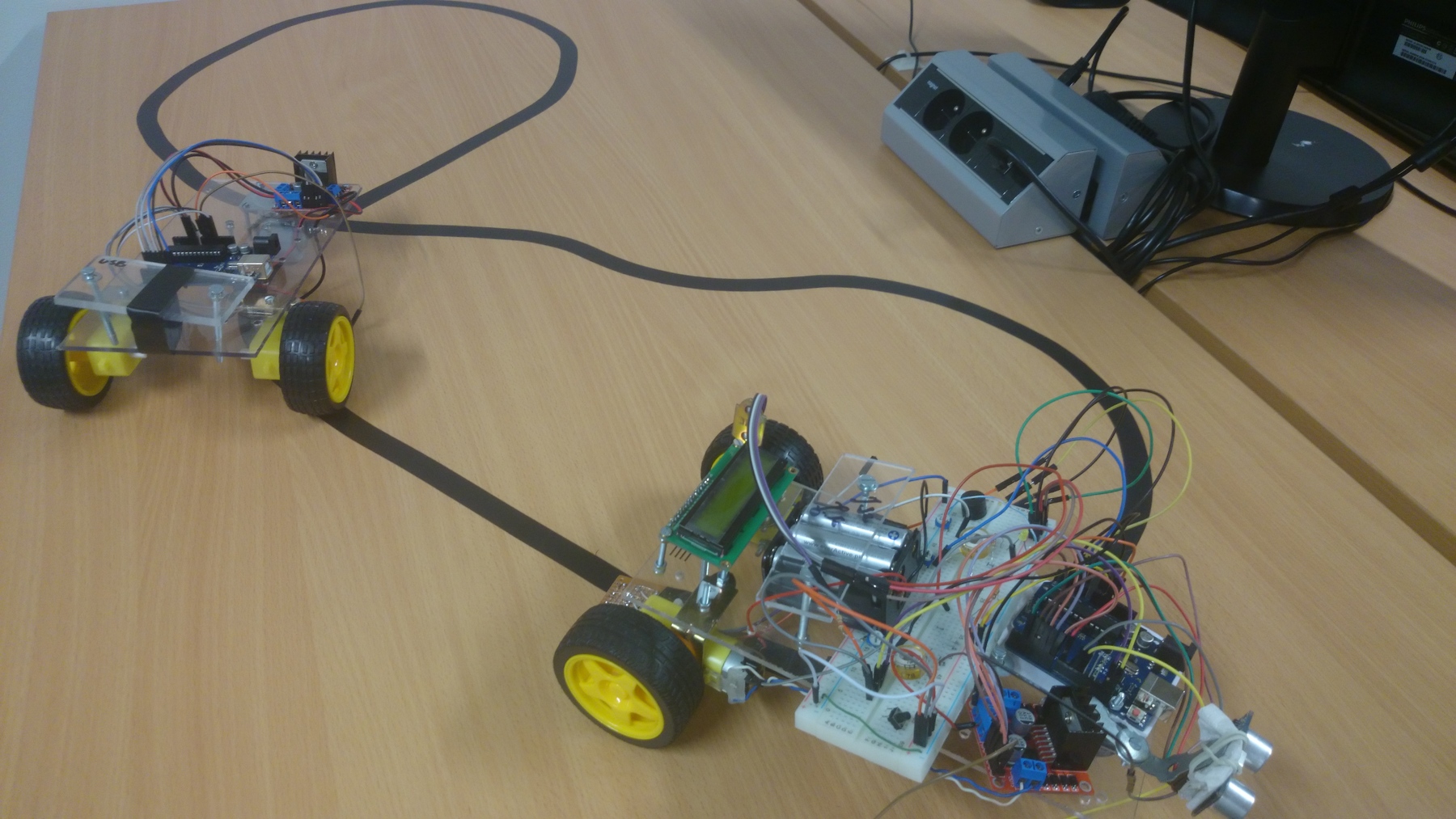
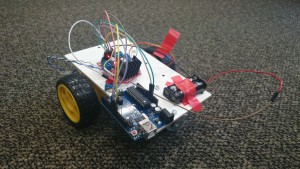
Pilot TV + koła + ekranik = pojazd na trzech kółkach!
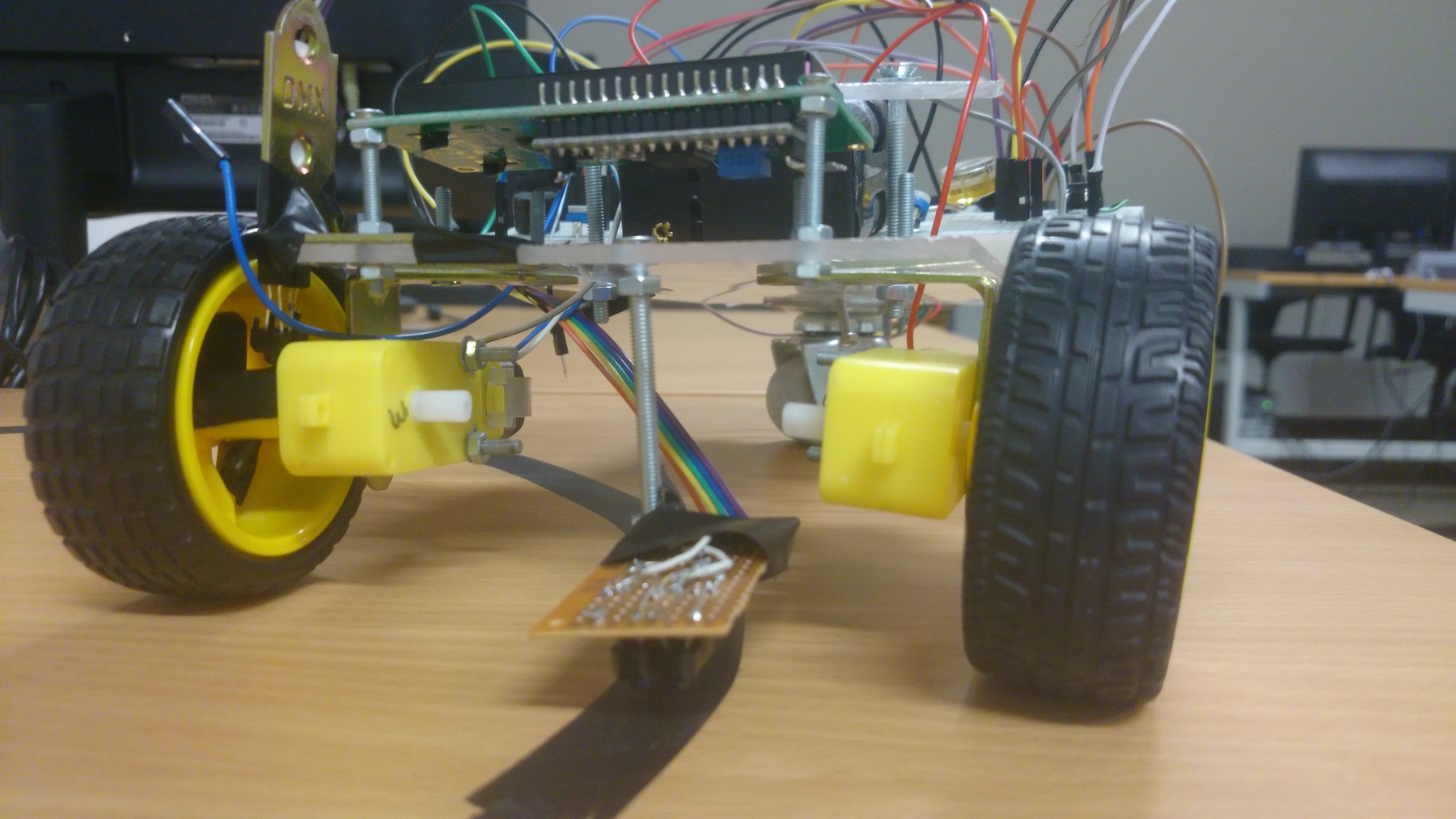
Przychodzi najciekawszy etap naszych zajęć – łączymy wszystkie poznane elementy w jeden projekt. Pochwalę Łukasza i Mateusza z ZSM CKP#2 za wytrwałą pracę i złożenie pojazdu, a następnie jego (proste) oprogramowanie.


Pojazd śmigał całkiem żwawo po podłodze (8x paluszki AAA to za duże napięcie jak na te silniki, ale…) i sterowany był pilotem na podczerwień. Na kolejnym spotkaniu uczniowie oprogramują maszynę w nowy sposób – mam nadzieję 😉
 Inni męczyli się jeszcze ze sterowaniem pojedynczym kołem przez pilot TV – mam nadzieję, że to „męczenie” było całkiem przyjemne i zachęcające do naszego następnego spotkania, za tydzień. Na nim wszyscy stworzą swojego pierwszego mobilnego robota. Zapraszam!
Inni męczyli się jeszcze ze sterowaniem pojedynczym kołem przez pilot TV – mam nadzieję, że to „męczenie” było całkiem przyjemne i zachęcające do naszego następnego spotkania, za tydzień. Na nim wszyscy stworzą swojego pierwszego mobilnego robota. Zapraszam!
Ostatnie zajęcia 23-06-2016, 16:00
na nasze ostatnie zajęcia proszę przynieście piloty od TV oraz dużo zapału do pracy (jak zawsze). Będą to także zajęcia podsumowujące, czyli miło by mi było widzieć osoby, które zapisały się na moje zajęcia a uczęszczały sporadycznie (nie wnikam w przyczyny) – będę ciekaw Waszych opinii o kursie. Dodatkowo zostaną przedstawione pozalekcyjne projekty Wydziału Fizyki dotyczące kształcenia młodzieży ponadgimnazjalnej w nadchodzącym roku szkolnym. Wakacje tuż tuż, może warto łyknąć inspirację i twórczo spędzić część lata w warsztacie robotycznym? Serdecznie zapraszam!


 tutaj nasz program:
tutaj nasz program: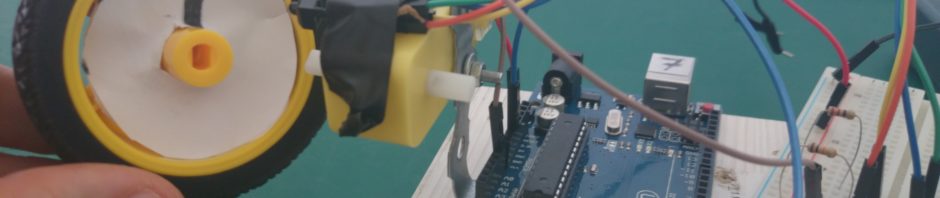

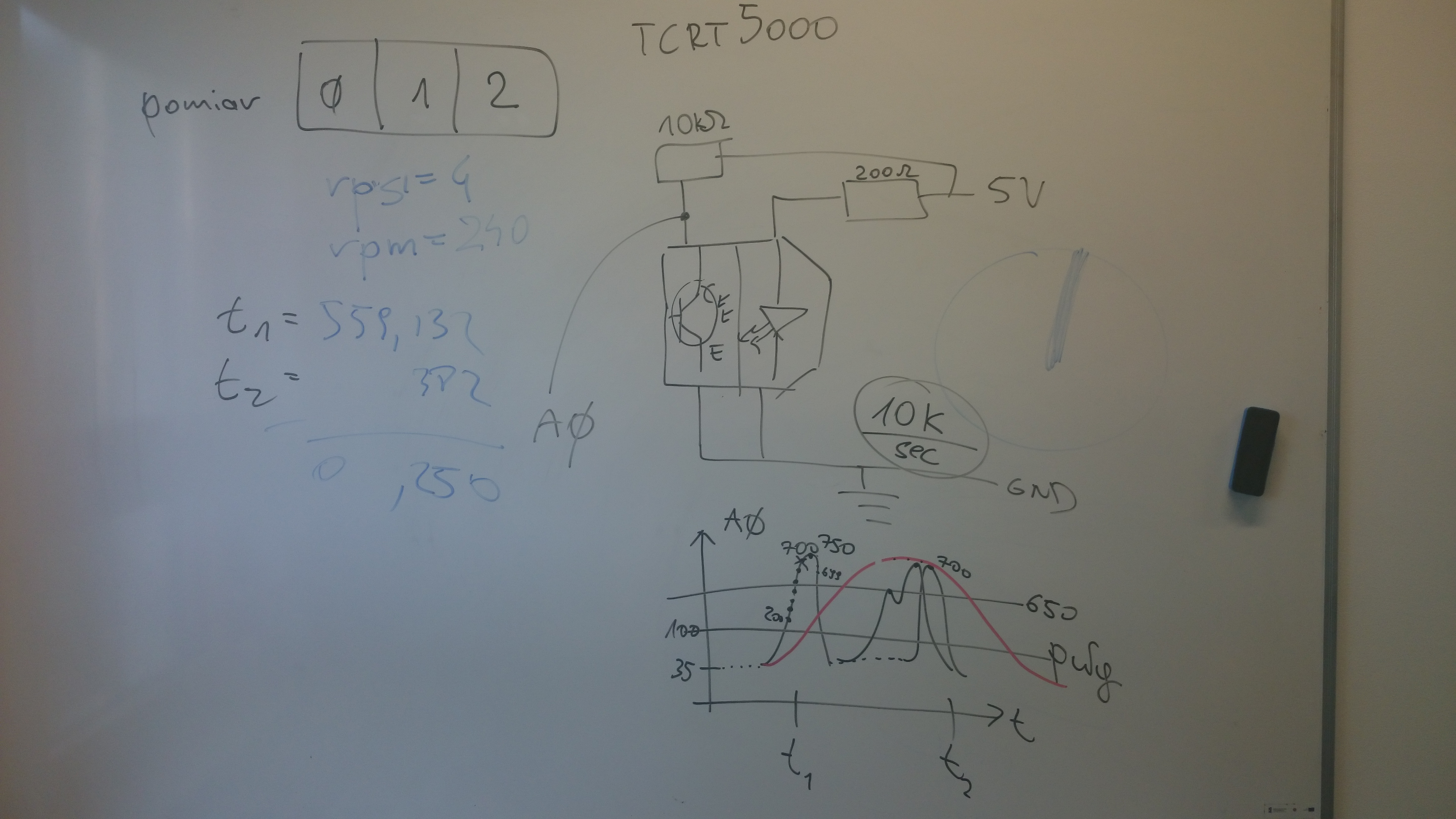 oraz program (wyjaśnienia i dyskusja później, jak też i omówienie dokładności pomiaru):
oraz program (wyjaśnienia i dyskusja później, jak też i omówienie dokładności pomiaru):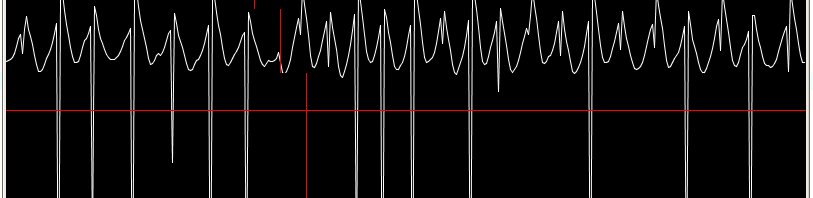
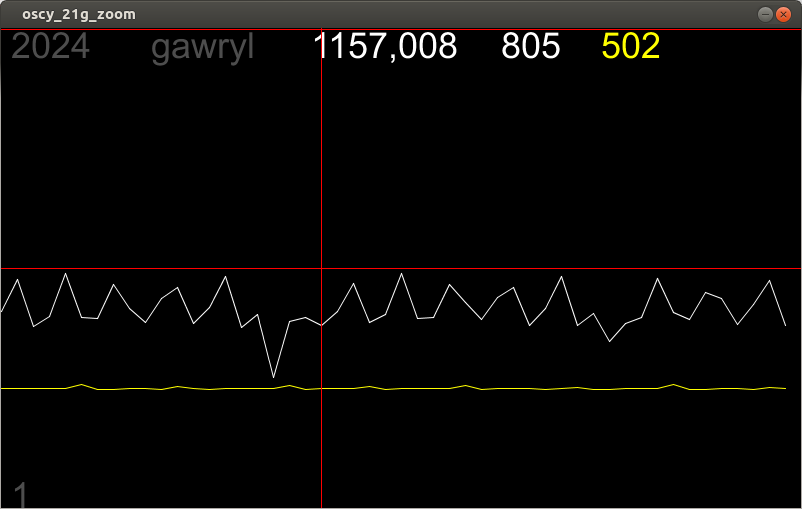
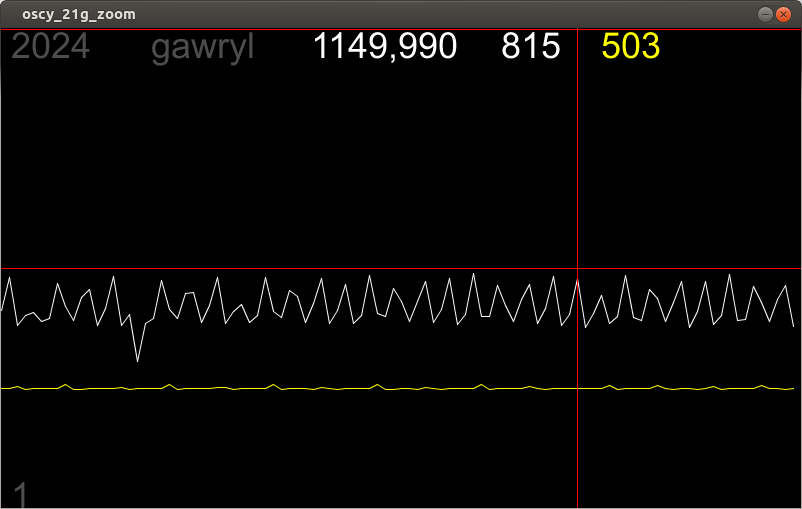
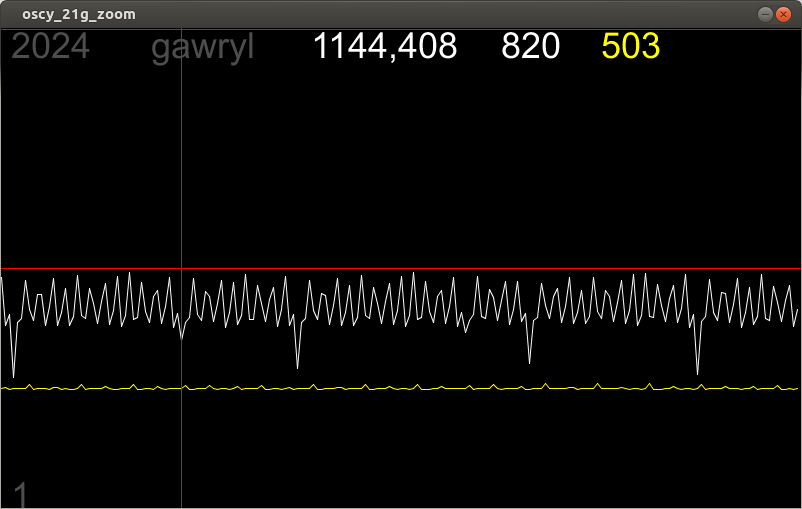
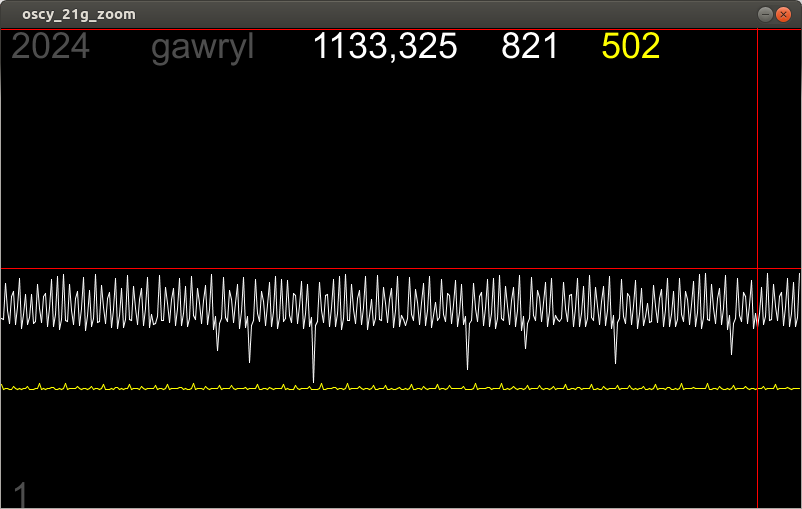
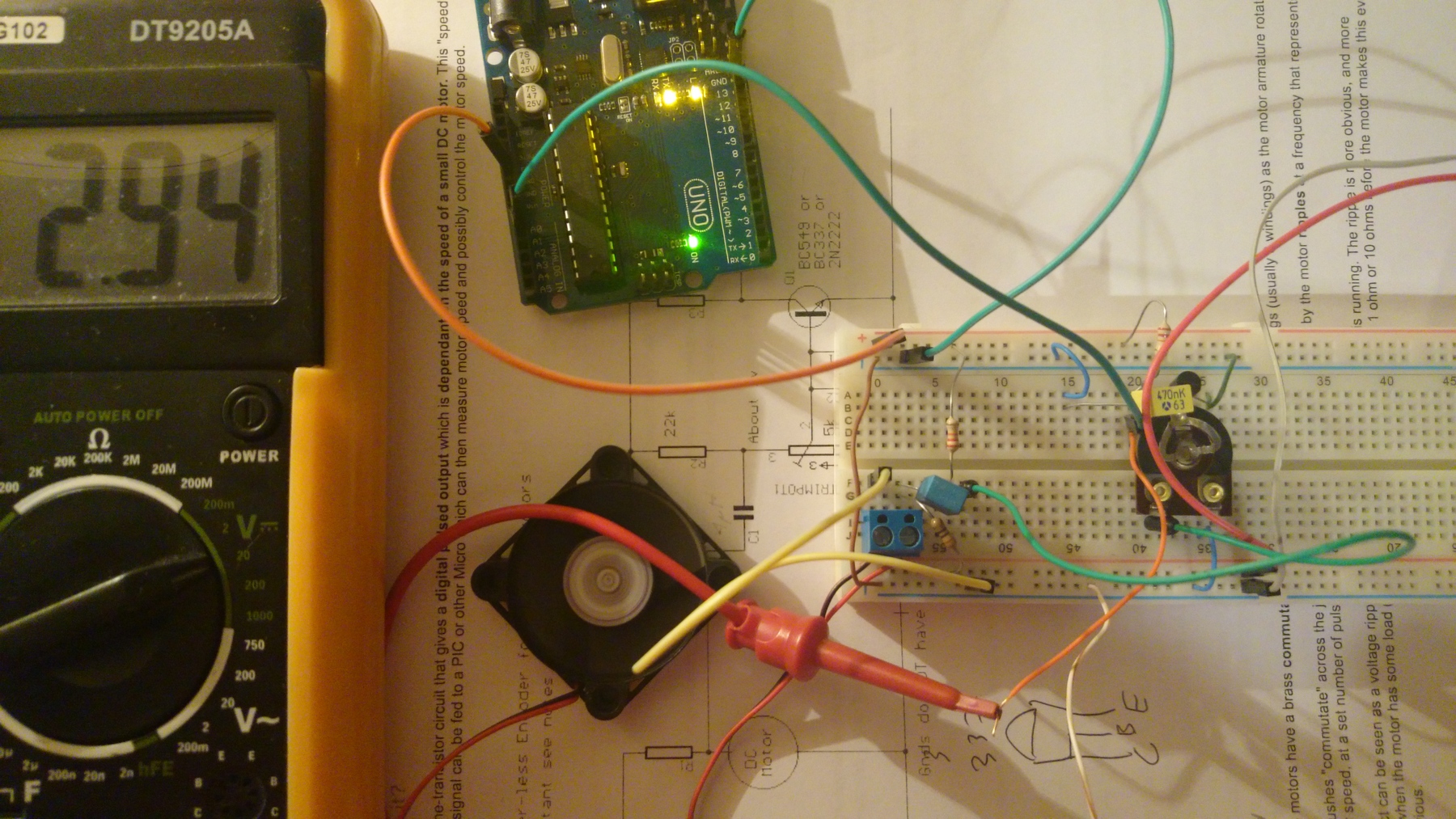
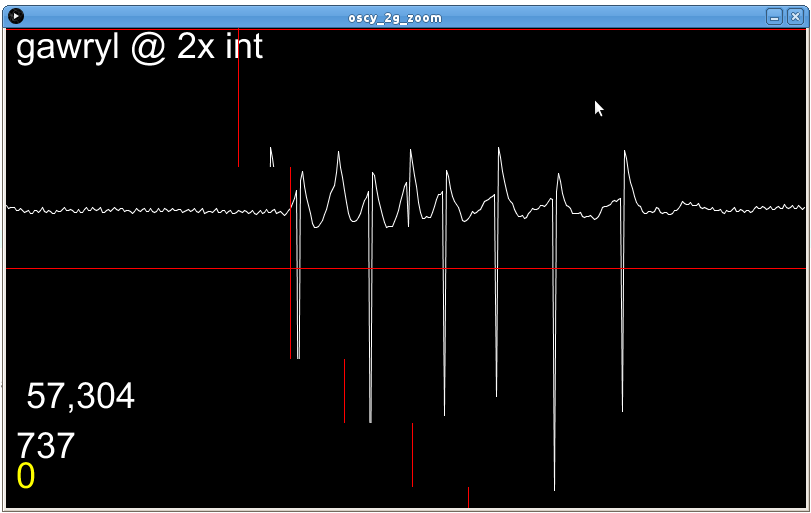
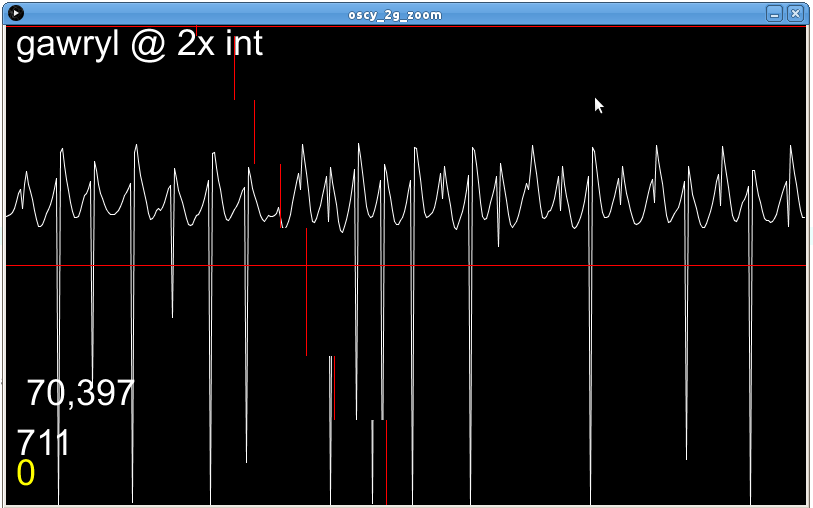
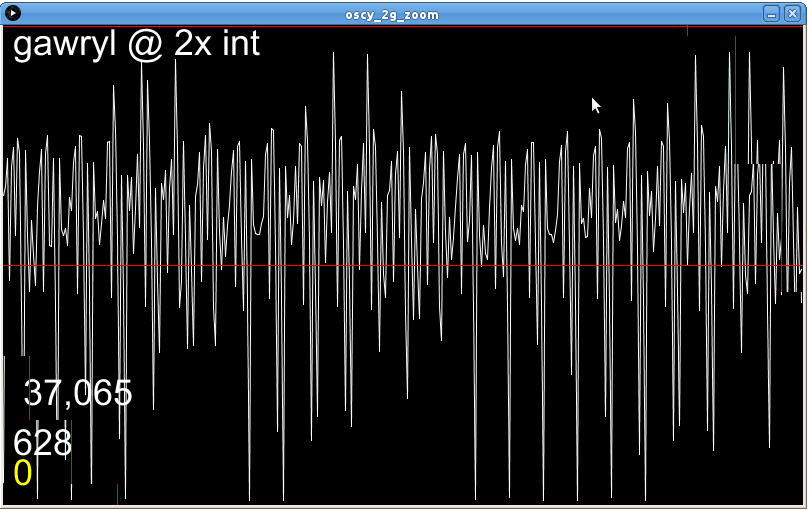
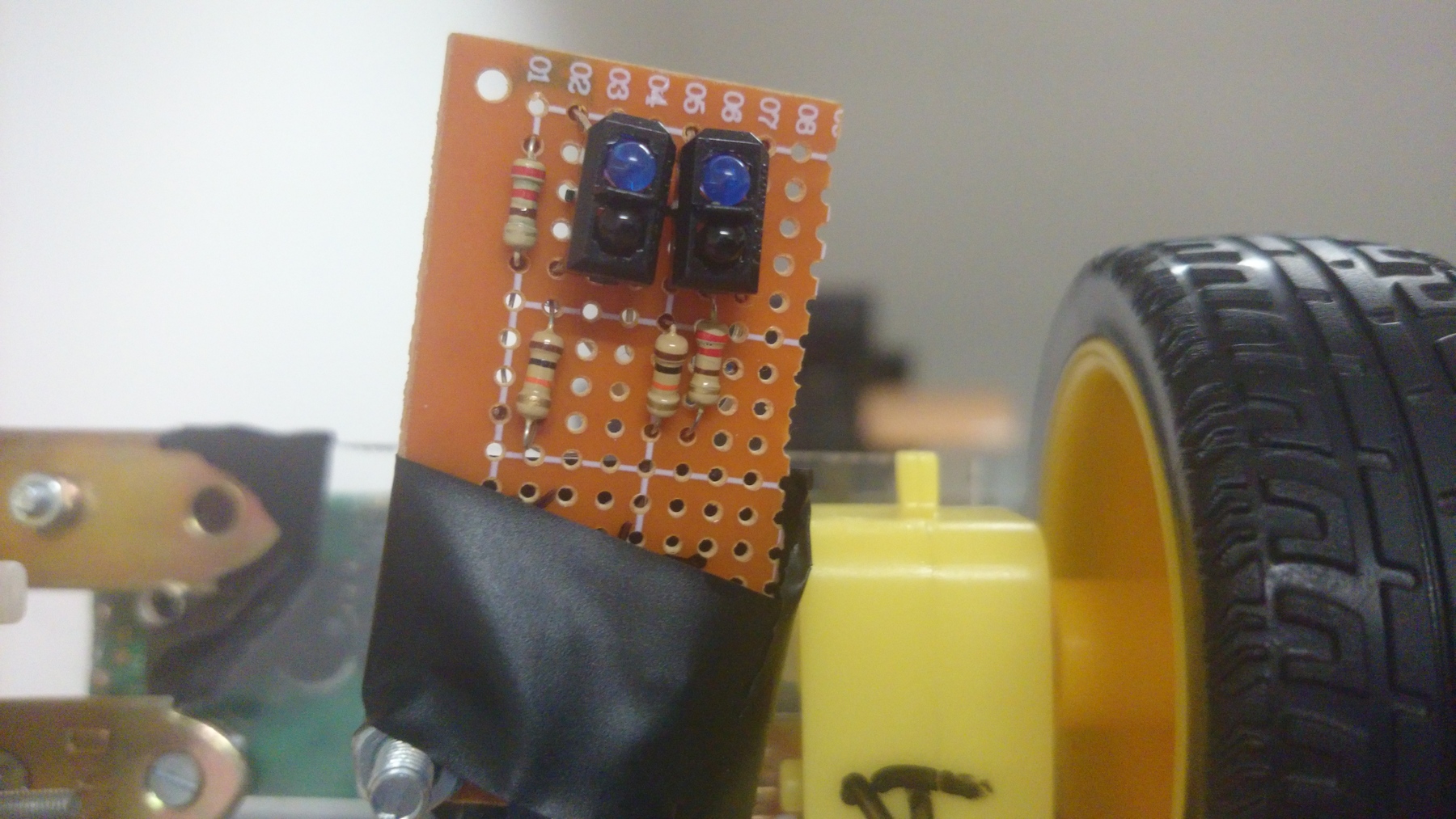
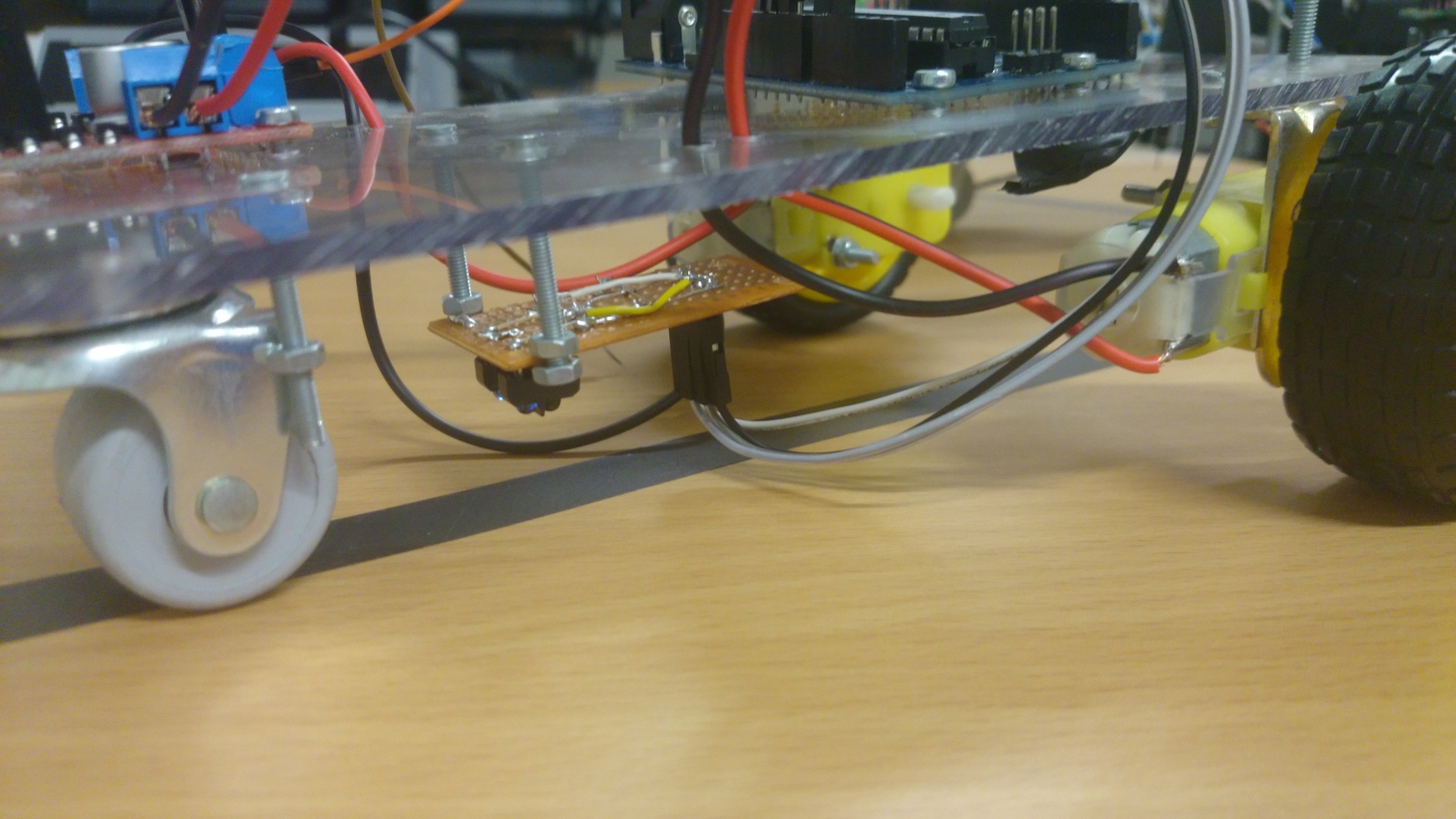
 który ma pełnić funkcję encodera do silników DC… Projekt wzorowany na
który ma pełnić funkcję encodera do silników DC… Projekt wzorowany na 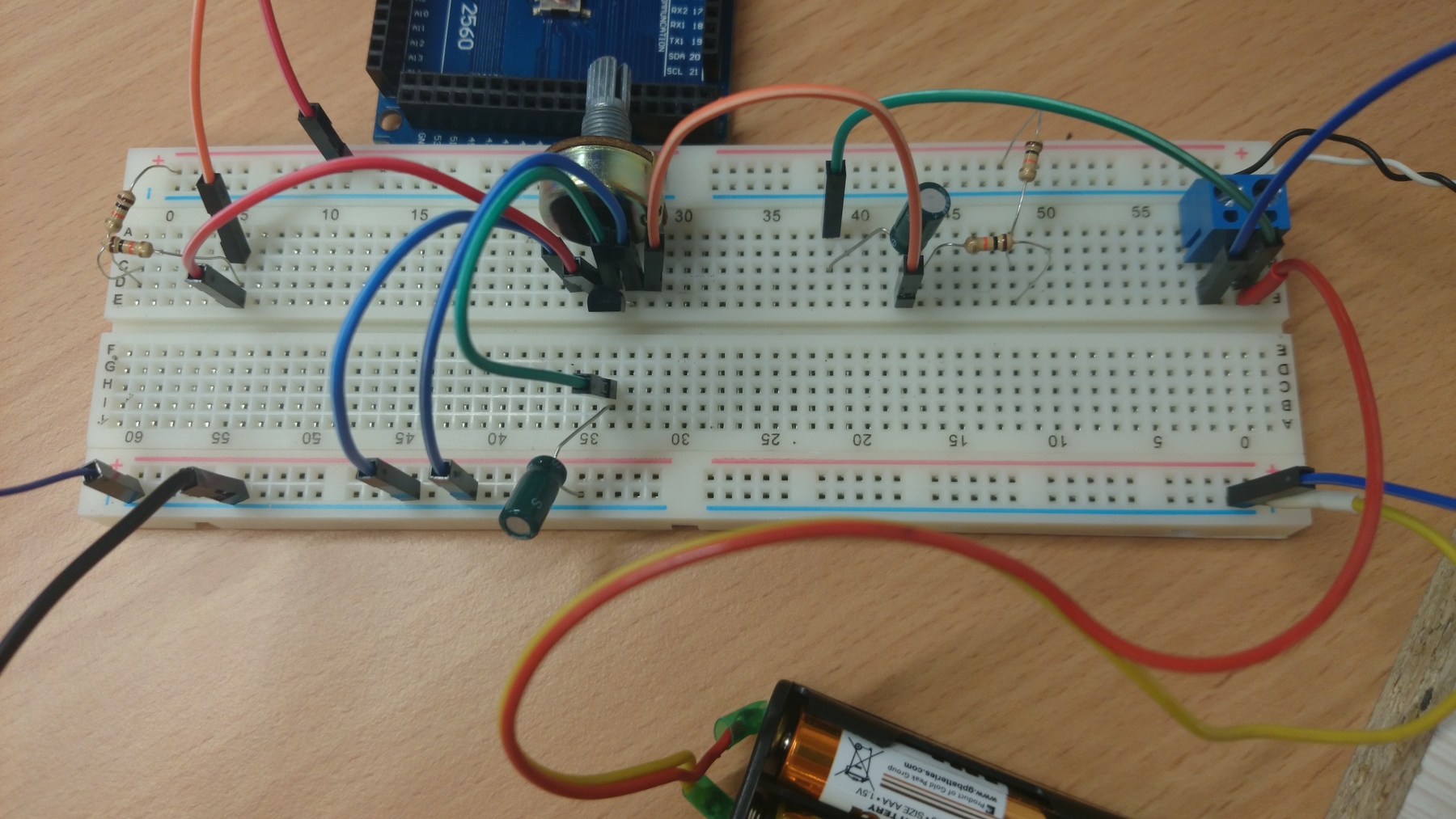 Ale nic w tym dziwnego, w końcu to pierwsze próby, jakaś godzina pracy nad tematem. Będzie dobrze 😉
Ale nic w tym dziwnego, w końcu to pierwsze próby, jakaś godzina pracy nad tematem. Będzie dobrze 😉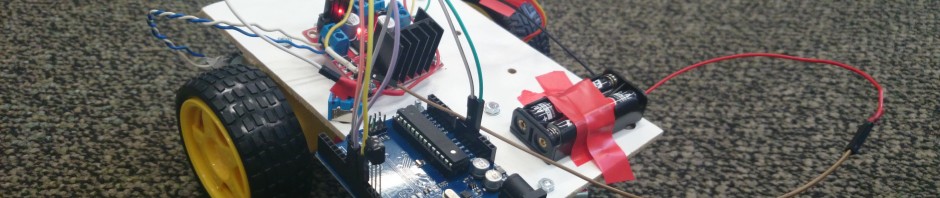





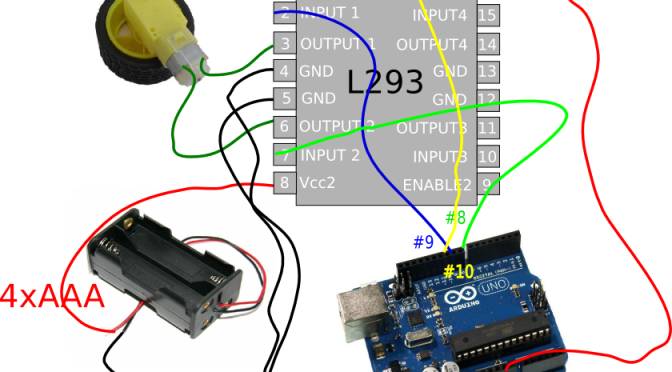
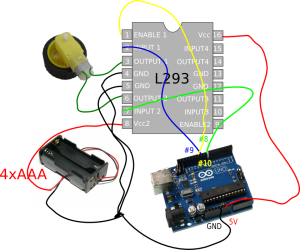
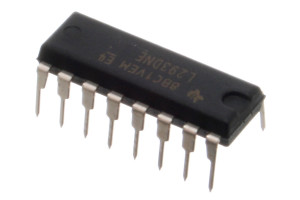 iś jest naszym nowym kolegą 😉 Prosty w obsłudze a umożliwia: podłączenie zewnętrznego zasilania do silników (np. większego niż 5V z Arduino – jakieś akumulatorki…), sterowaniem dwoma silnikami DC, oraz sterowanie mocą silnika. Programowanie tego układu jest bardzo proste – o ile rozumiemy jak programować cyfrowe wyjścia Arduino, ale poto tyle czasu męczyliśmy się właśnie z LEDami i PWMami, aby taki L293 był bajecznie prosty. Warte zapamiętania jest sekwencja sterująca: dwa jednakowe sygnały oznaczają STOP, sygnały „zero” i „jeden” RUCH w jedną stronę, „jeden” i „zero” RUCH w drugą stronę. Proste. Dodatkowo zapoznaliśmy się z mod
iś jest naszym nowym kolegą 😉 Prosty w obsłudze a umożliwia: podłączenie zewnętrznego zasilania do silników (np. większego niż 5V z Arduino – jakieś akumulatorki…), sterowaniem dwoma silnikami DC, oraz sterowanie mocą silnika. Programowanie tego układu jest bardzo proste – o ile rozumiemy jak programować cyfrowe wyjścia Arduino, ale poto tyle czasu męczyliśmy się właśnie z LEDami i PWMami, aby taki L293 był bajecznie prosty. Warte zapamiętania jest sekwencja sterująca: dwa jednakowe sygnały oznaczają STOP, sygnały „zero” i „jeden” RUCH w jedną stronę, „jeden” i „zero” RUCH w drugą stronę. Proste. Dodatkowo zapoznaliśmy się z mod ułem na bazie układów L293 (tutaj: L298) i pokazałem, jak się z nimi obchodzić (bateryjka + śrubokręt). Tutaj warto pamiętać o drobnych (acz istotnych) szczegółach z not katalogowych tych układów (przede wszystkim: maksymalny prąd pracy!).
ułem na bazie układów L293 (tutaj: L298) i pokazałem, jak się z nimi obchodzić (bateryjka + śrubokręt). Tutaj warto pamiętać o drobnych (acz istotnych) szczegółach z not katalogowych tych układów (przede wszystkim: maksymalny prąd pracy!).