
Wojny robotów: problem – serwa i Bluetooth (BT)
Pan Rafał oprogramowywał sterowanie swojej „kanapki” z wykorzystaniem modułu BT. Nie jest to może najlepsze rozwiązanie sterowania, ale szybkie i bezproblemowe (jasne, jasne – czytaj dalej). Proste, po włączamy dwie standardowe biblioteki Servo.h oraz SoftwareSerial.h i piszemy prosty kod.
#include <Servo.h>
#include <SoftwareSerial.h>
SoftwareSerial bt(8, 9);//RxD, TxD
Servo silnik;
void setup() {
Serial.begin(9600);
bt.begin(9600);
silnik.attach(3);
Serial.println("start!");
}
void loop() {
if (bt.available()){
char komenda=bt.readString());
Serial.print("odebrano= ");
Serial.println(komenda);//dla sprawdzenia
switch (komenda){
case 'W': silnik.writeMicroseconds(1000); break; //przod
case 'S': silnik.writeMicroseconds(2000); break; //tyl
case 'X': silnik.writeMicroseconds(1500); break; //stop
}//switch
}A tu klops! Ilekroć przesyłane są dane przez moduł BT, to serwa „wariują”, zachowują się zupełnie nieoczekiwanie. Można to sprawdzić powyższym kodem gdzie przesyłamy 'W’ przez Bluetooth i silnik kręci się na maksa do przodu, a następnie wysyłamy z apki kolejne, nic nie znaczące znaczki (wciskamy inne, zdefiniowane przyciski, np. 'A’, 'D’ itd). Te komendy powinny zostać zignorowane (brak odpowiednich instrukcji w switch-u), a serwo powinno utrzymywać swój dotychczasowy ruch. Tak się jednak nie dzieje…
Jak zawsze najpierw należało sprawdzić przewody połączeniowe, ale to nie one okazały się przyczyną problemów. Grzebanie w internecie okazało się sukcesem – biblioteka SoftwareSerial.h korzysta z tego samego układu czasowego (timera) w Artudino co biblioteka Servo.h, do sterowania PWM. Chodzi o to, ze Arduino (a dokładniej ATmega 328P) posiada trzy niezależne timery: dwa 8-bitowe oraz jeden 16-to bitowy. Właśnie z tego ostatniego korzystają dwie wspomniane biblioteki i powstaje konflikt!
Rozwiązaniem może być alternatywna biblioteka do obsłui serw: ServoTimer2. Już sama nazwa wskazuje, że korzysta ona z drugiego timera – nie powinno być więc konfliktu z SoftwareSerial.h. Lekko zamieniamy kod programiku i sprawdzamy zachowanie serw podczas przesyłania danych z BT. Klops: jednak nie pomogło.
Jeśli nie biblioteka serw, to szukamy zamiennika do drugiej biblioteki – komunikacji szeregowej. Tutaj trafiamy na AltSoftSerial i nasze nadzieje nie gasną 😉 Ponownie modyfikujemy kod (uwaga: pinami do komunikacji są „na sztywno” pin 9 oraz 10 – nie ma możliwości wyboru, jak w przypadku biblioteki SoftwareSerial.h).
Nie poddajemy się i stosujemy dwa zamienniki bibliotek jednocześnie – bum! mamy to! działa!
#include <ServoTimer2.h>
#include <AltSoftSerial.h>
AltSoftSerial bt;//Arduino UNO -> RxD=9, TxD=10, nie ma wyboru!
ServoTimer2 silnik;
void setup() {
Serial.begin(9600);
bt.begin(9600);
silnik.attach(3);
Serial.println("start!");
}
void loop() {
if (bt.available()){
char komenda=bt.readString());
Serial.print("odebrano= ");
Serial.println(komenda);//dla sprawdzenia
switch (komenda){
case 'W': silnik.write(1000); break; //przod
case 'S': silnik.write(2000); break; //tyl
case 'X': silnik.write(1500); break; //stop
}//switch
}Niewielkie zmiany, ale istotne. Warto zwrócić uwagę, że funkcja write() dla obiekty ServoTimer2 zapisuje mikrosekundy wypełnienia, czyli dokładnie to co robi funkcja writeMicroseconds() z obiekty Servo (biblioteka Servo.h), co jest trochę mylące. Wystarczy mieć to na uwadze i będzie OK.
Jeszcze jedno: wspomniany problem nie występuje na starszych wersjach środowiska i bibliotek Arduino IDE. Warto sprawdzić.
Wojny robotów: trzecia „kanapka” i korki (przymyślenia).
Pan Kacper buduje trzeci pojazd „kanapka”. Mamy nowe, trochę zmodyfikowane tymczasowe koła – choć drukarka 3D pracuje powoli, to i tak trzeba się natrudzić przy składaniu całej konstrukcji (jakieś 3h?).
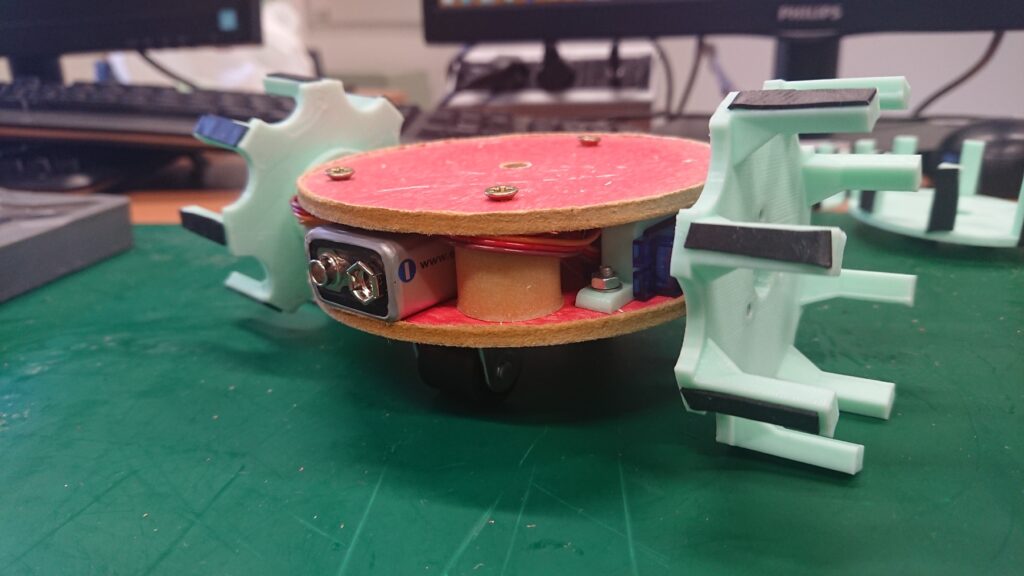
Myślałem, że wykorzystanie korków od wina jest oryginalne – a tu się okazało, że takie zabiegi były znane i (zapewne) stosowane przynajmniej od roku 1200+. Źródła historyczne donoszą, że prawdziwy podróżnik awanturnik na szlaku musiał posiadać zestaw korków – pewnie w celach majsterkowania, bo po cóż innego miał on je w swoim ekwipunku?

Wojny robotów: szybkość obrotowa (RPM) silczka
Pan Tomasz z kolei zawziął się na zbadaniu prędkości obrotej kół (RPM = Revolutions Per Minute). Prosty układ pomiarowy (tymczasowy) pozwolił mu zmierzyć tą prędkość. Układ składa się z potencjometru do sterowania prędkością serwa Feetech FT90R (z prawej strony), oraz czujki szczelinowej (umieszczonej na – oczywiście – korku do wina) wraz z przymocowanym kołem zębatym (druk 3D).
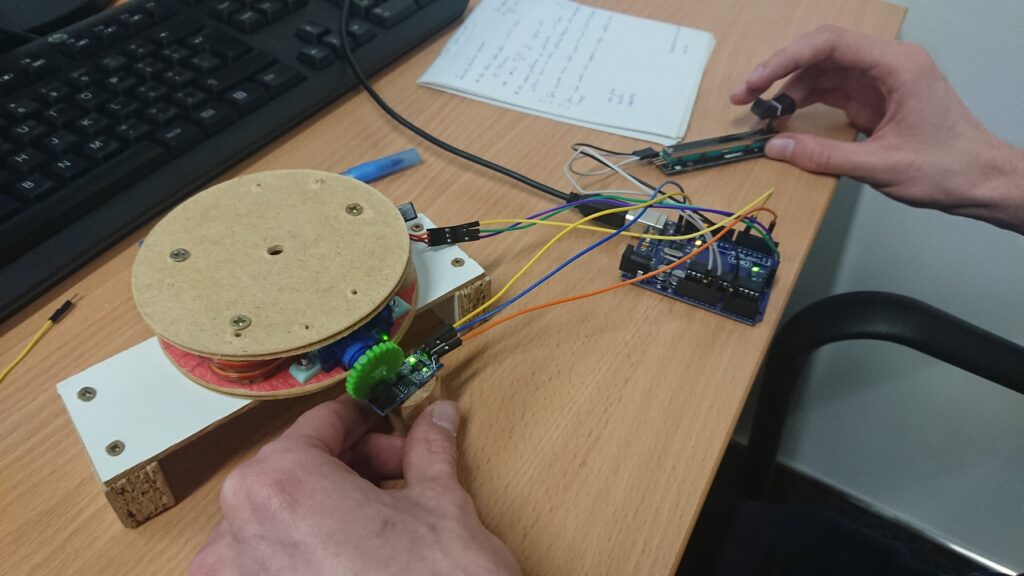
Pan Tomasz wykorzystał przerwania z Arduino UNO (a dokładniej jedno, ze zboczem narastającym). cdn…
Maskotka
BB zakończył prace nad płytą główną do Maskotki – aktualnie przygotowywane jest lepsze sterowanie prędkością kół – kontroler PID.
Kolejne spotkanie: czwartek 15:00